






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
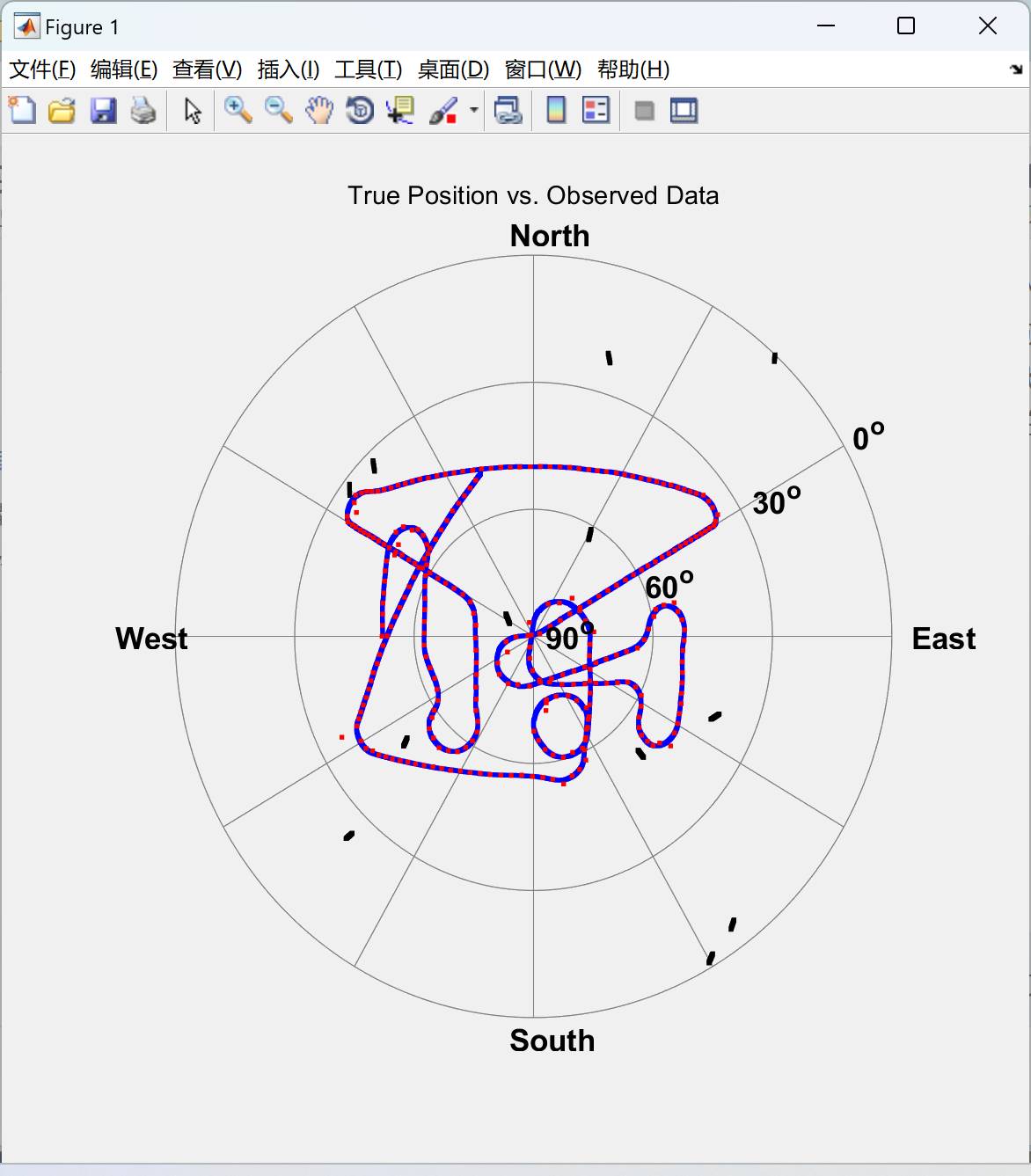
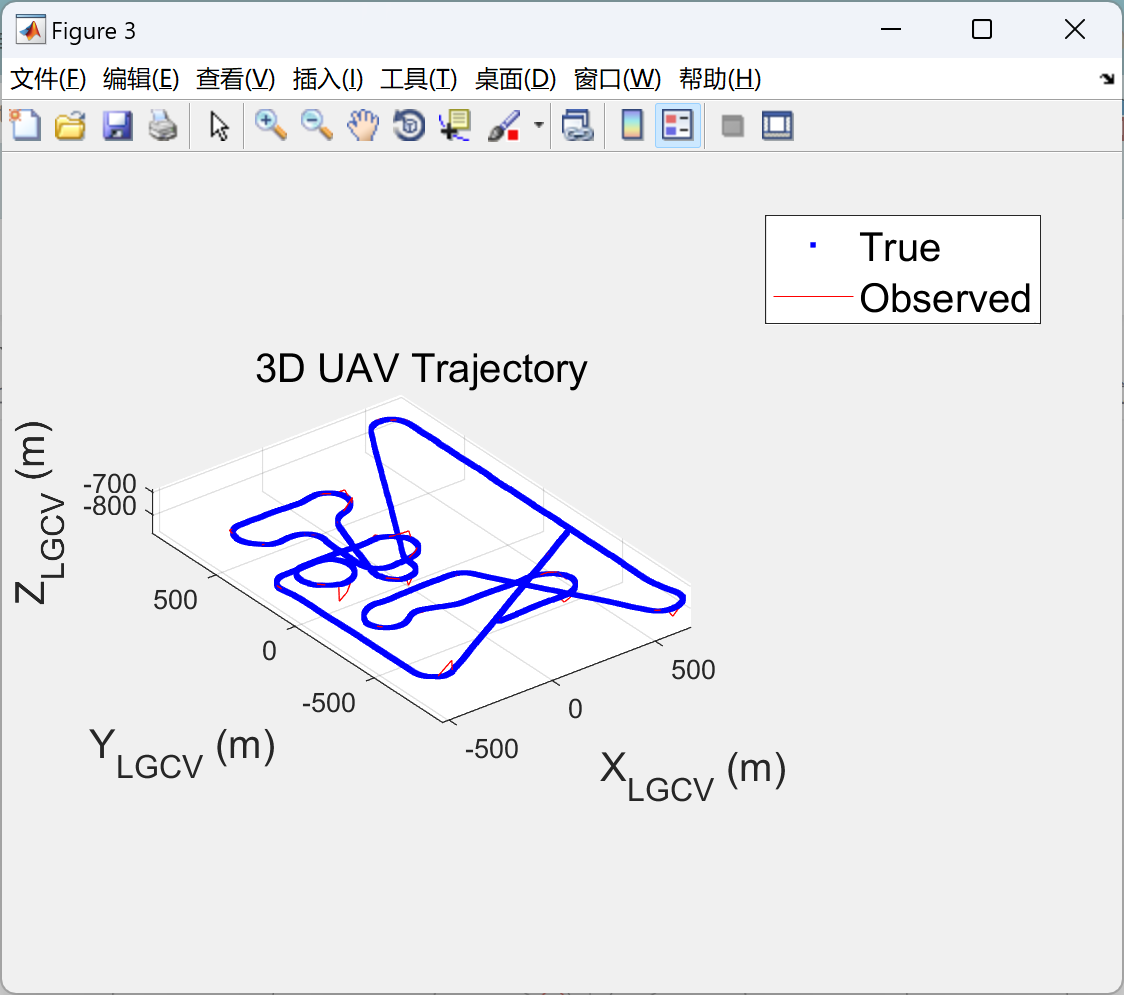
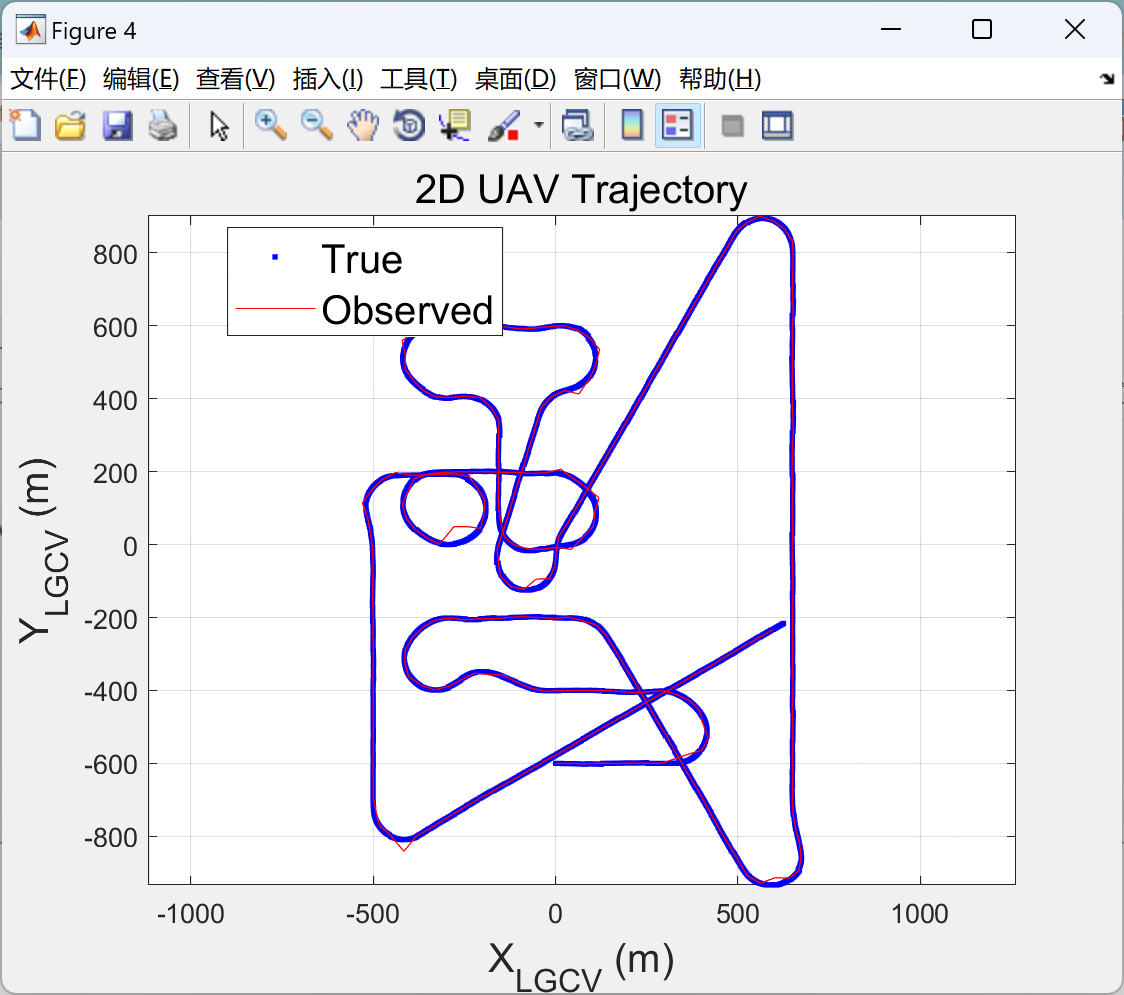
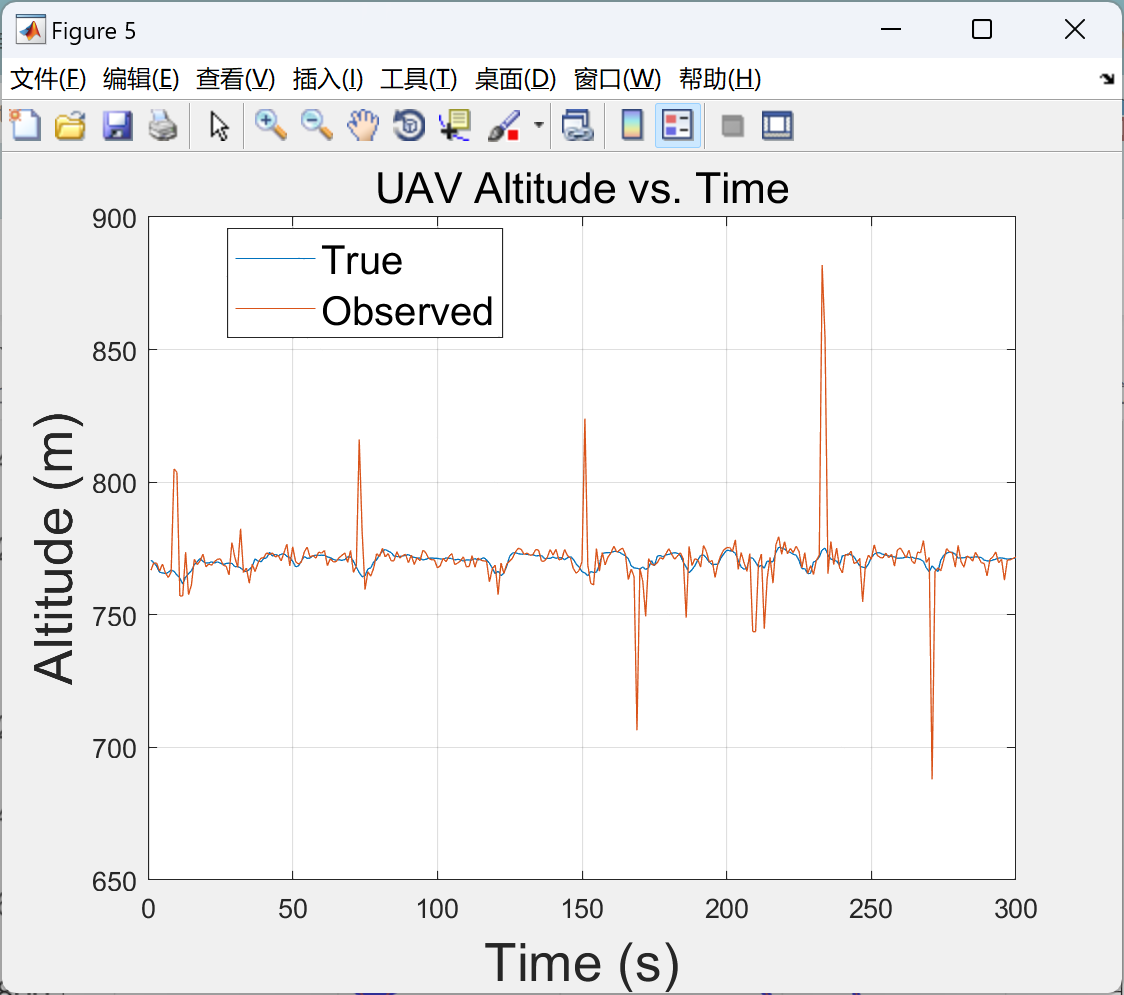
使用GPS(全球定位系统)数据来确定无人机的轨迹是一种常见的方法。通过收集无人机在飞行过程中的GPS数据,包括经度、纬度、高度和时间等信息,可以推断无人机的运动轨迹。然后,这些推断的轨迹数据与实际的位置数据进行验证,以确认无人机的飞行路径是否与预期一致。这种验证过程可以通过比对GPS数据和实际位置数据的差异来完成,通常使用误差分析和统计方法来评估轨迹的准确性和可靠性。这样的验证过程对于确保无人机飞行的安全性和准确性至关重要,尤其是在需要精确控制和导航的应用场景下,如无人机遥感、航拍和无人机交通管理等领域。
📚2 运行结果
 部分代码:
部分代码:
% Clear workspace, close all open figure & clear the command window
clear all
close all;
clc;
% Extract the data from the text file
% Add other folders to path
addpath('../data', '../lib/', '../lib/conversion');
% Load constants
constants();
% Initialise Ground Station Position
% Defining Sydney Ground Station Coordinates
lat = deg2rad(-34.76);
long = deg2rad(150.03);
alt = 680;
pos_llh_gs = [lat;long;alt];
% File Name
uav_data_fpath = 'UAVPosition_F1.txt';
% Import pseudorange data
pseudo_data = importdata('GPS_pseudorange_F1.txt');
% Load ECEF position values of satellites
load ECEFPos
%% Categorising time values
% Vernal Equinox time
equinox_time = 7347737.336;
% Store time data
times = pseudo_data(:,1) - equinox_time;
% Obtain the unique time values
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]智瀚宇,贾新春,张学立.无人机路径规划:一种粒子群和灰狼复合算法[J/OL].控制工程:1-8[2024-04-20].https://doi.org/10.14107/j.cnki.kzgc.20221058.
[2]段跃飞. 无人机路径规划算法研究[D].电子科技大学,2023.DOI:10.27005/d.cnki.gdzku.2023.005771.















 468
468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









