






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
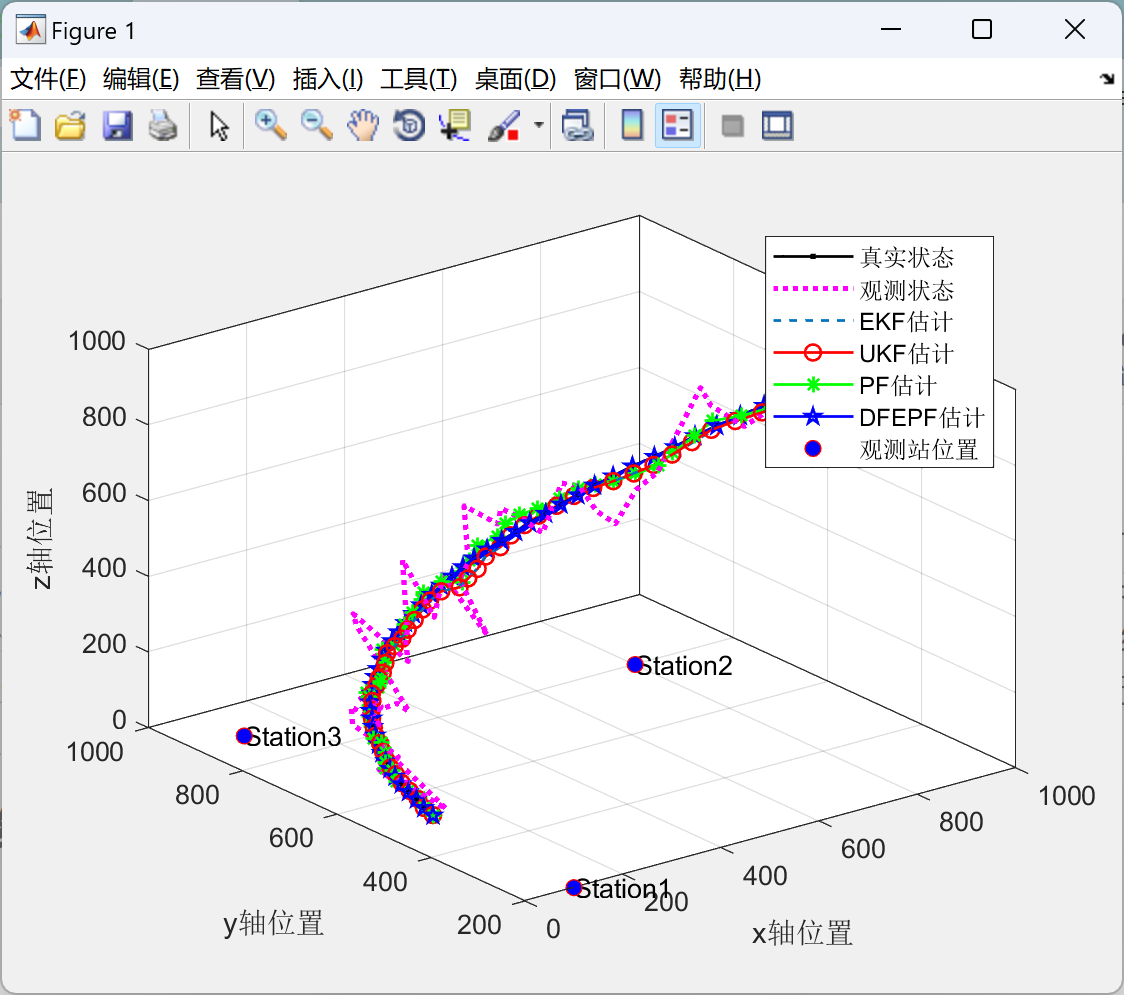
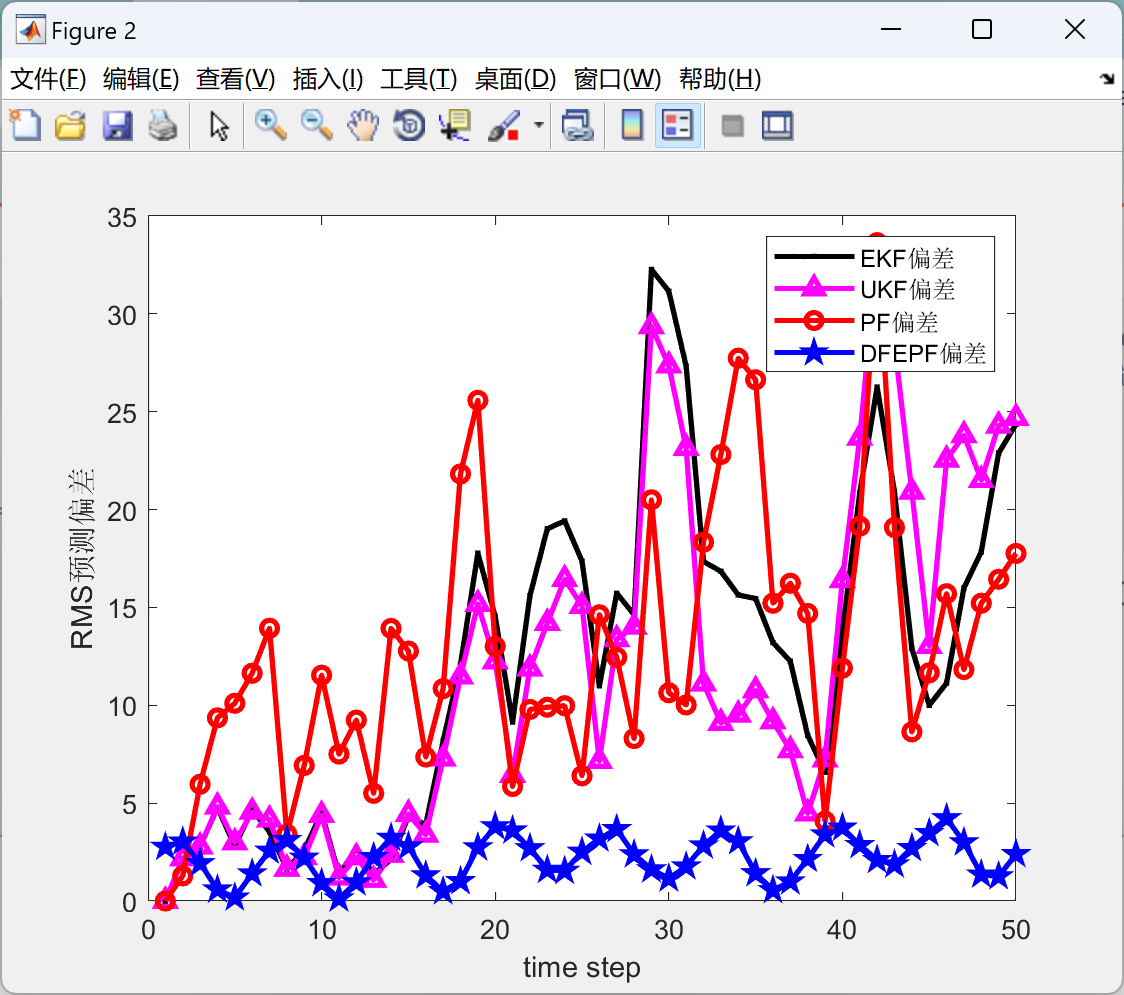
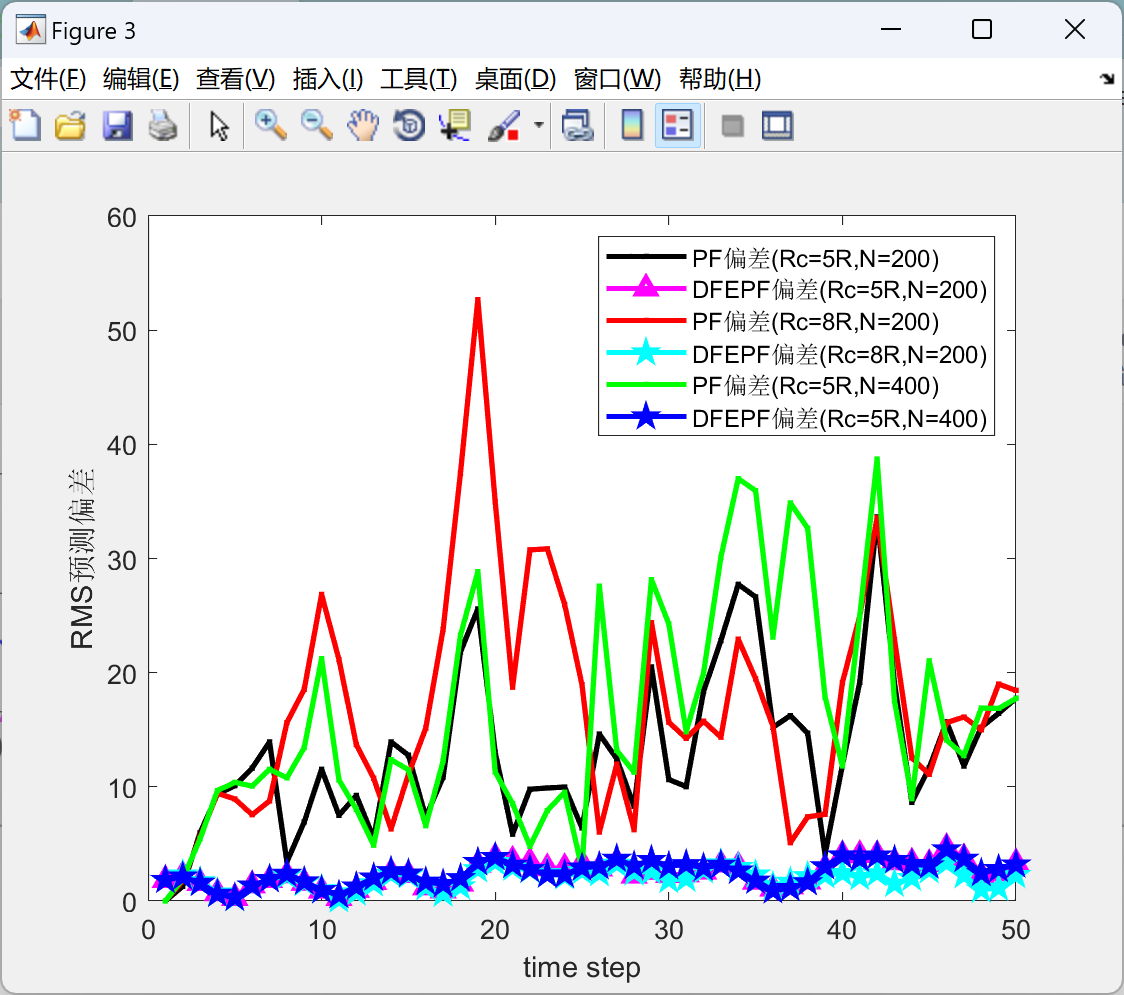
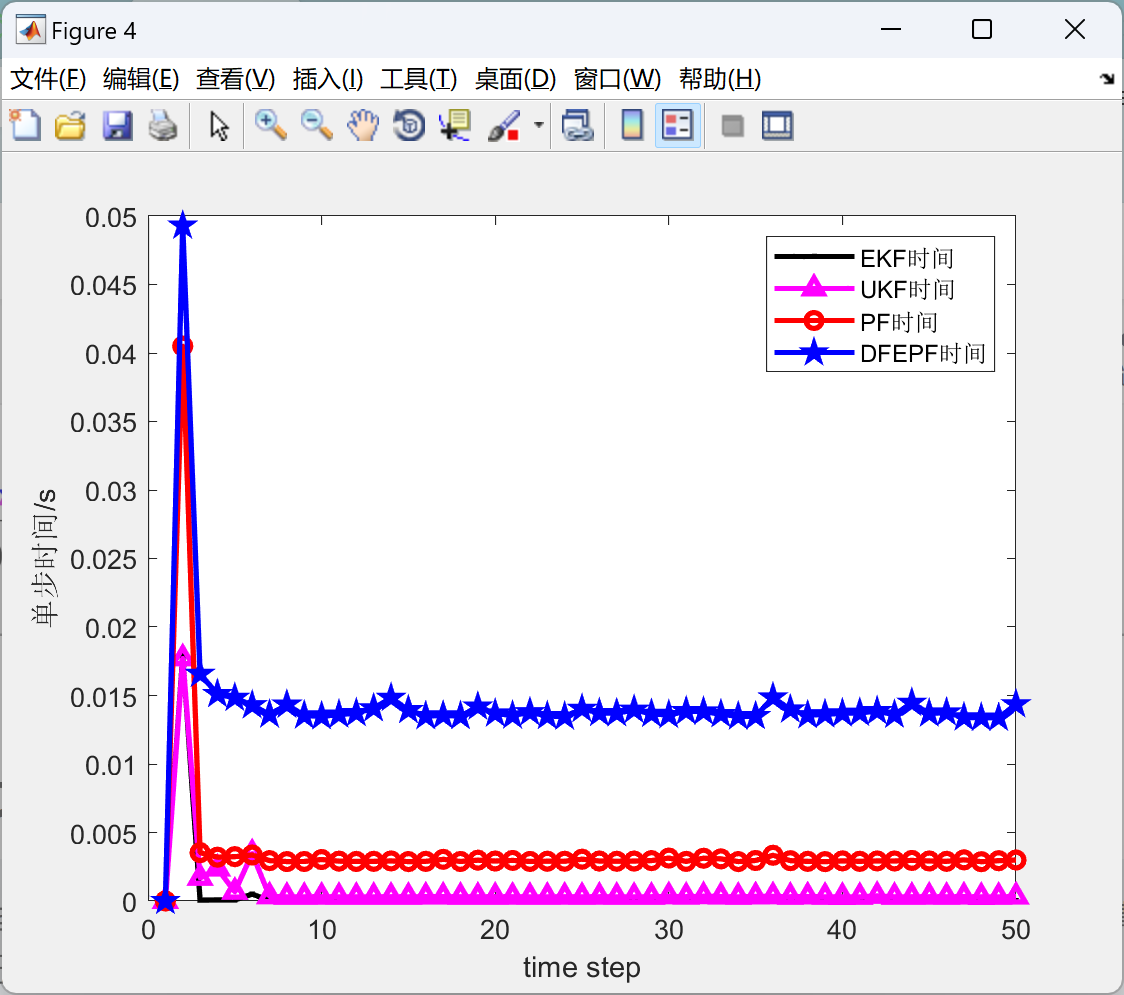
改进粒子滤波的无人机三维航迹预测方法是一种用于无人机轨迹预测的高效技术,它结合了粒子滤波算法和其他改进策略,以提高预测准确性和鲁棒性。:通过优化粒子的重新采样策略,如重采样时的权重更新规则和采样数量,可以改善滤波器的收敛性和稳定性。改进粒子滤波的无人机三维航迹预测方法通过结合粒子滤波算法和其他改进策略,实现了对无人机轨迹的准确、鲁棒和实时预测,具有广泛的应用前景,可在航空领域和其他相关领域中得到有效应用。
📚2 运行结果
主函数部分代码:
% 功能说明:ekf,ukf,pf,改进pf算法的无人机航迹预测比较程序
function main
% 因本程序涉及太多的随机数,下面让随机数每次都不变
rand('seed',3);
randn('seed',6);
% error('下面的参数T请参考书中的值设置,然后删除本行代码')
n = 9;
T = 50;
Q= [1 0 0 0 0 0 0 0 0; % 过程噪声协方差矩阵
0 1 0 0 0 0 0 0 0;
0 0 1 0 0 0 0 0 0;
0 0 0 0.01 0 0 0 0 0;
0 0 0 0 0.01 0 0 0 0;
0 0 0 0 0 0.01 0 0 0;
0 0 0 0 0 0 0.0001 0 0;
0 0 0 0 0 0 0 0.0001 0;
0 0 0 0 0 0 0 0 0.0001];
R = [5000 0 0; % 观测噪声协方差矩阵
0 0.01^2 0 % 角度的观测值偏差不能给的太大
0 0 0.01^2];
% 系统初始化
X = zeros(9,T); % 真实值
Z = zeros(3,T);
% 真实状态初始化
%X(:,1)=[1000;5000;200;10;50;10;2;-4;2]+sqrtm(Q)*randn(n,1);
X(:,1)=[100;500;20;10;50;10;2;-4;2]+sqrtm(Q)*randn(n,1);
state0 = X(:,1);
x0=0;
y0=0;
z0=0;
Station=[x0;y0;z0]; % 观测站的位置
P0 =[100 0 0 0 0 0 0 0 0; % 协方差初始化
0 100 0 0 0 0 0 0 0;
0 0 100 0 0 0 0 0 0;
0 0 0 1 0 0 0 0 0;
0 0 0 0 1 0 0 0 0;
0 0 0 0 0 1 0 0 0;
0 0 0 0 0 0 0.1 0 0;
0 0 0 0 0 0 0 0.1 0
0 0 0 0 0 0 0 0 0.1];
%%%%%%%%%%%%% EKF滤波算法 %%%%%%%%%%%%
Qekf = Q; % EKF过程噪声方差
Rekf = R; % EKF过程噪声方差
Xekf=zeros(9,T); % 滤波状态
Xekf(:,1)=X(:,1); % EKF滤波初始化
Pekf = P0; % 协方差
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]钟罡,周蒋颖,杜森等.基于航迹预测的无人机短时航迹偏离检测方法[J/OL].系统工程与电子技术:1-16[2024-03-17].http://kns.cnki.net/kcms/detail/11.2422.TN.20231216.1346.002.html.
[2]张铮,汪杰,倪西学.面向无人机数据采集的LoRa扩频因子预测模型研究[J].仪器仪表学报,2023,44(10):294-302.DOI:10.19650/j.cnki.cjsi.J2311741.















 172
172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









