






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
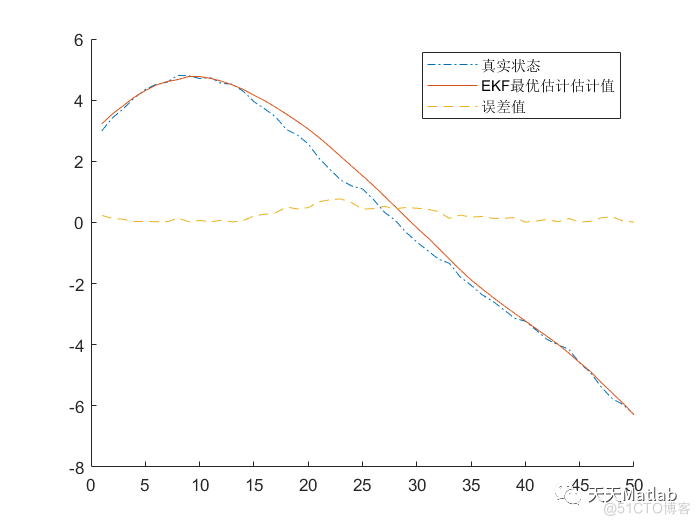
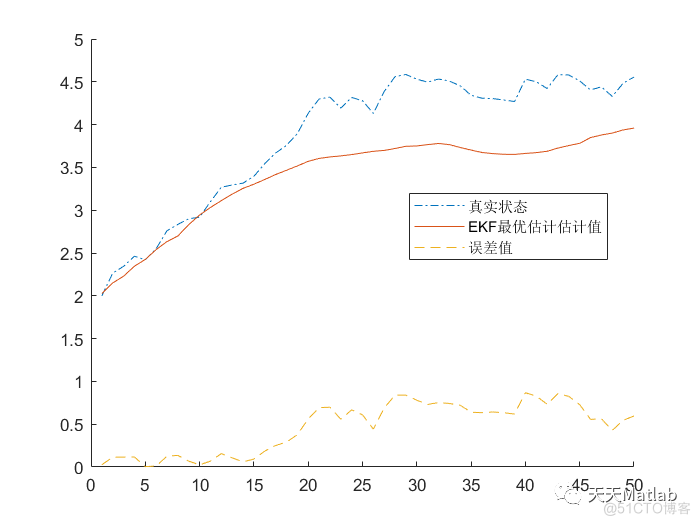
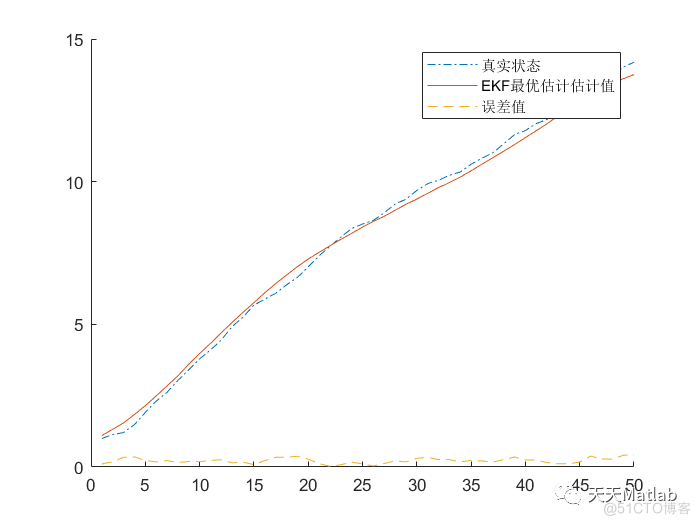
微型无人机具有轻小,便携等优点,可以在未知环境中替代人工进行探测并完成一些复杂且危险的任务,从而降低人员的伤亡风险.近年来,具有未知环境自主探索功能的微型无人机更是成为军民用无人机研究的新浪潮.本文基于EKF实现四旋翼无人机姿态估计。
⛄ 部分代码
function [z,A]=jaccsd(fun,x)
% JACCSD Jacobian through complex step differentiation
% [z J] = jaccsd(f,x)
% z = f(x)
% J = f'(x)
%
z=fun(x);
n=numel(x);
m=numel(z);
A=zeros(m,n);
h=n*eps;
for k=1:n
x1=x;
x1(k)=x1(k)+h*1i;
A(:,k)=imag(fun(x1))/h;
end
⛄ 运行结果
⛄ 参考文献
[1] 石川, 林达, 张果,等. 基于QEKF的四旋翼飞行器姿态估计[J]. 现代雷达, 2018.
[2] 段敏, 赵凌, 周莹. 基于扩展卡尔曼滤波的四旋翼无人机姿态估计方法[J]. 现代信息科技, 2022(006-004).
[3] 钟佳朋, 王常虹, 伊国兴,等. 基于EKF的小型涵道式无人机航姿系统算法研究[J]. 导航与控制, 2010, 09(003):23-27.















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









