







车道线+测距+测速说明文档
拿到yolov5代码
准备
解压yolov5.zip,并用pycharm打开yolov5
第一步
pip install -r requirements
第二步
运用yolov5下面的dis_det_last.py将目标的距离和速度计算出来
在pycharm 终端 运行下面的代码
python dis_det_last.py --view-img
第三步
进入lannet文件夹
pip install -r re.txt
把第二步的结果一个a路径下
并把video_lan.py的第83行进行修改为你的视频路径
input_video_path = "data/lane1.mp4"
第四步
终端运行python video_lan.py
python video_lan.py
最后在output_video.mp4查看结果视频
简介
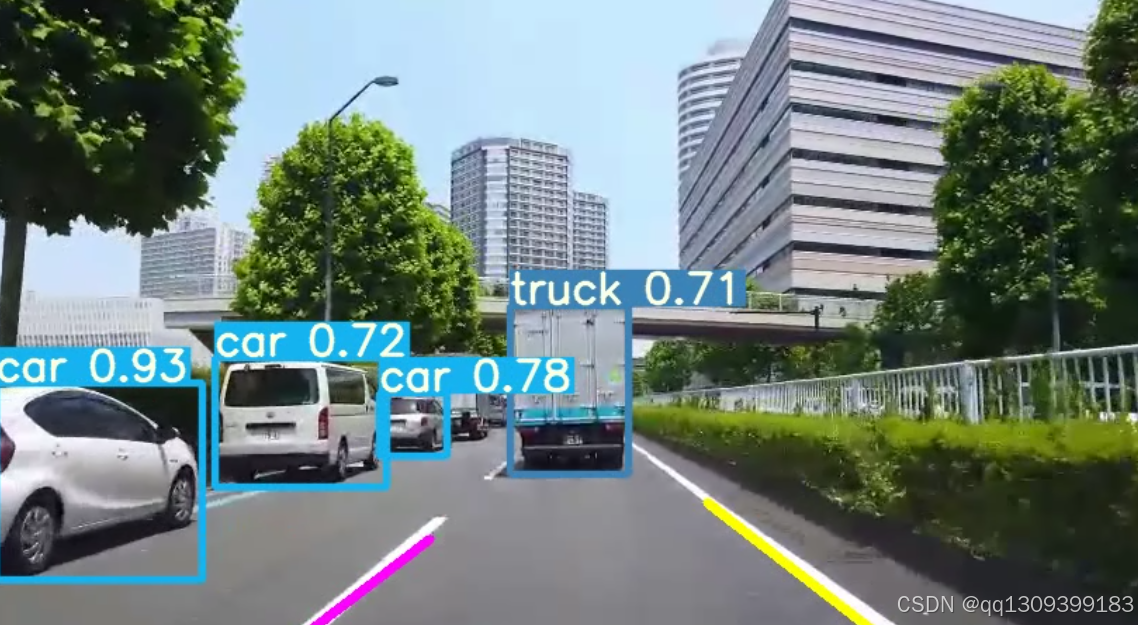
车道线检测、测距与测速系统说明文档
1. 系统概述
本系统结合了车道线检测、车辆到前方障碍物的距离测量以及车辆速度的实时监测功能。这些功能通过集成摄像头、雷达传感器(或激光雷达)以及适当的算法实现,旨在提高驾驶安全性并辅助驾驶员进行决策。
2. 技术架构
- 图像处理:使用计算机视觉技术来识别车道线。
- 雷达/激光雷达:用于精确测量车辆与前方障碍物之间的距离。
- GPS/IMU:提供车辆的位置信息和运动状态数据,辅助测速及位置校正。
- 中央处理器:整合所有传感器的数据,并执行必要的计算以生成最终结果。
3. 功能模块介绍
3.1 车道线检测
- 输入:来自车载摄像头的视频流。
- 过程:
- 图像预处理:包括灰度化、边缘检测等步骤。
- 车道线定位:利用霍夫变换或其他算法识别车道线。
- 曲率估计:计算车道线的曲率半径,帮助判断转弯情况。
- 输出:车道线的位置信息及其曲率。
3.2 测距
- 输入:雷达或激光雷达提供的点云数据。
- 过程:
- 障碍物识别:从点云中区分出不同类型的物体。
- 距离计算:基于物体反射信号的时间差确定其距离。
- 输出:前方最近障碍物的距离。
3.3 测速
- 输入:GPS信号、IMU数据、轮速传感器读数等。
- 过程:
- 多源数据融合:将来自不同传感器的速度信息综合起来。
- 速度估算:采用卡尔曼滤波器等方法优化速度估计。
- 输出:当前车辆的速度。
4. 数据处理流程
- 数据采集:从各个传感器获取原始数据。
- 预处理:对图像数据进行降噪、增强等操作;对雷达数据进行初步过滤。
- 特征提取:从图像中提取车道线特征;从雷达数据中提取目标信息。
- 数据分析:根据提取的特征进行进一步分析,如车道线拟合、障碍物分类等。
- 结果呈现:将处理后的结果以易于理解的形式展示给用户,例如通过仪表盘显示或语音提示。
5. 应用场景
- 高级驾驶辅助系统(ADAS):为驾驶员提供车道偏离警告、碰撞预警等功能。
- 自动驾驶:作为自动驾驶汽车感知环境的重要组成部分之一。
- 智能交通管理:在城市交通监控系统中应用,帮助改善交通流量控制。
6. 注意事项
- 环境因素:恶劣天气条件下(如雨雪天),系统的性能可能会受到影响。
- 维护保养:定期检查传感器的工作状态,确保其正常运行。
- 隐私保护:处理过程中涉及的个人数据应遵循相关法律法规,采取适当措施保护用户隐私。
7. 结论
本系统通过集成多种传感技术和先进的算法,能够有效地提升行车安全性和舒适性。随着技术的发展,未来有望实现更多智能化的功能,进一步丰富人们的出行体验。


















 494
494

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









