







智能停车系统
基于YOLO11的实时车位检测系统
本项目采用定制训练的YOLOv11模型,通过深度学习技术检测空闲/占用停车位。模型基于PK数据集训练,并部署于树莓派实现实时监控。
📋 目录
- 项目简介
- 数据集
- 模型架构
- 环境安装
- 模型训练
- 性能评估
- 树莓派部署
- 实验结果
- 未来改进
- 许可协议
📖 项目背景
随着车辆保有量激增,城市停车管理已成为重要挑战。传统人工巡查效率低下,导致车辆空转寻位,加剧碳排放。
本系统通过摄像头实时画面,自动识别车位状态。实现流程包括:
- 使用PKLot数据集进行数据采集与预处理
- 基于Ultralytics YOLO框架训练模型
- 模型验证与性能评估
- 部署至树莓派实现实时推理
📂 数据集
采用公开的PKLot数据集,关键特性:
- 数据来源:通过Roboflow获取
- 多样性:包含不同天气、时段的停车场景
- 标注规范:YOLO格式标注(边界框坐标+车位状态标签)
- 鲁棒性:覆盖光照变化、车辆尺寸差异、局部遮挡等真实场景
🧠 模型架构
使用YOLO11高性能检测模型,核心参数:
- 输入分辨率:640×640像素
- 训练轮次:10 epochs
- 优化器:默认SGD/Adam
- 损失函数:
- 定位损失(边界框回归)
- 目标置信度损失
- 分类损失(空闲/占用判断)
轻量化设计适配树莓派等边缘设备
⚙️ 环境安装
- 安装依赖:
pip install ultralytics opencv-python matplotlib numpy - Colab用户可直接安装:
!pip install ultralytics
🚀 模型训练
步骤:
- 准备PKLot数据集(需包含
data.yaml定义类别) - 加载预训练模型:
from ultralytics import YOLO model = YOLO('yolov8n.pt') # 或自定义YOLO11模型 - 启动训练:
model.train(data='path/to/data.yaml', epochs=10, imgsz=640)
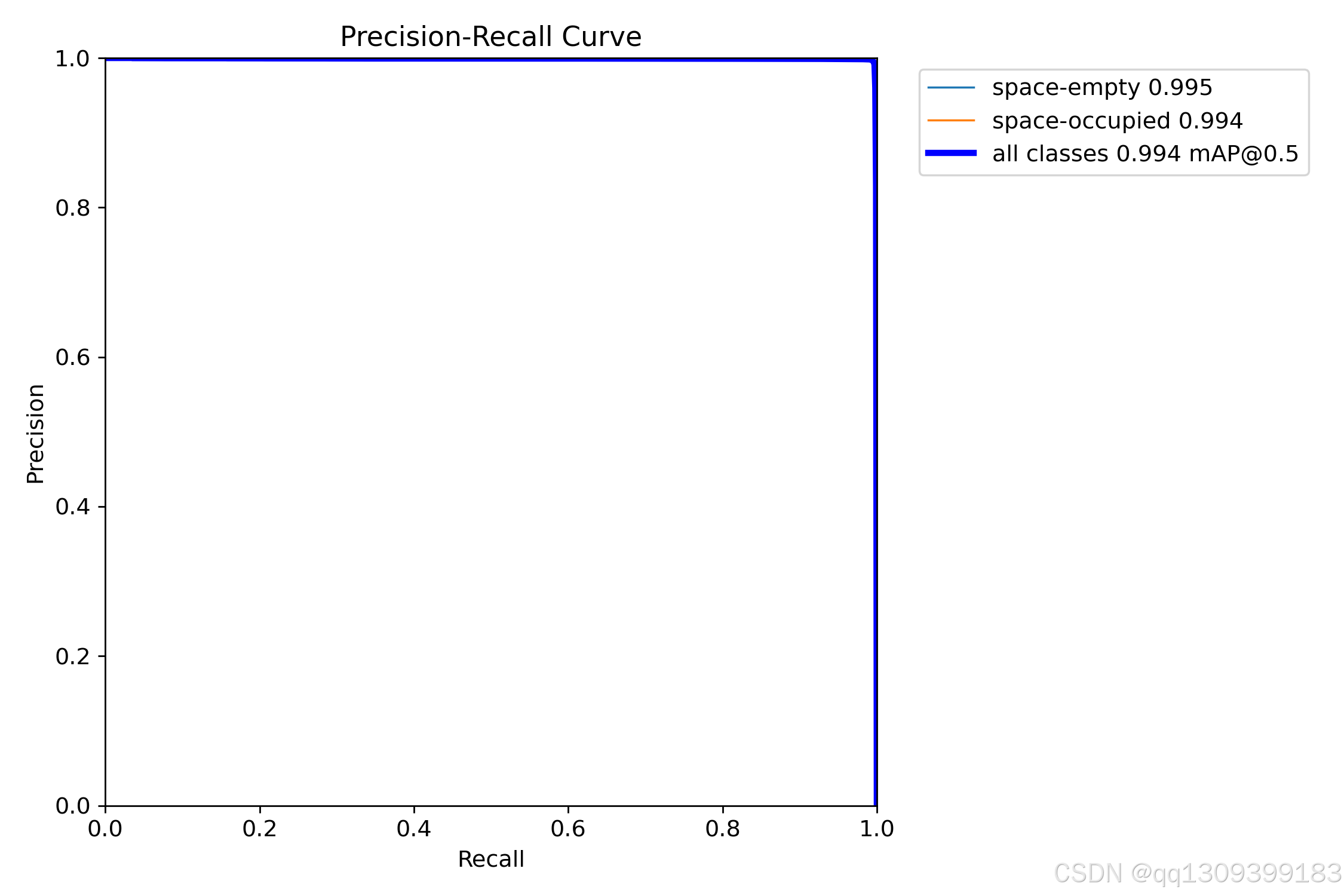
📈 性能评估
- 验证集测试:
results = model.val() - 可视化预测:
model.predict('test_image.jpg', save=True)
评估指标:mAP、精确率、召回率
🖥️ 树莓派部署
- 将训练好的
best.pt模型传输至树莓派 - 连接摄像头模块
- 运行实时检测脚本:
import cv2 from ultralytics import YOLO model = YOLO('best.pt') cap = cv2.VideoCapture(0) while cap.isOpened(): ret, frame = cap.read() results = model.predict(frame, conf=0.5) cv2.imshow('Smart Parking', results[0].plot()) if cv2.waitKey(1) == ord('q'): break
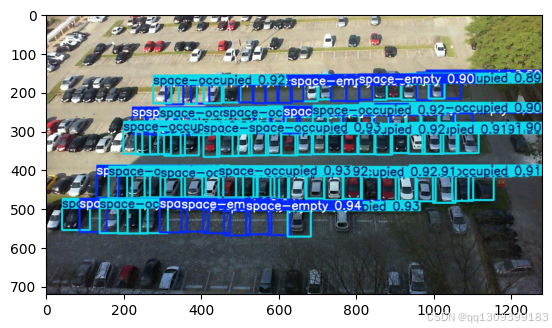
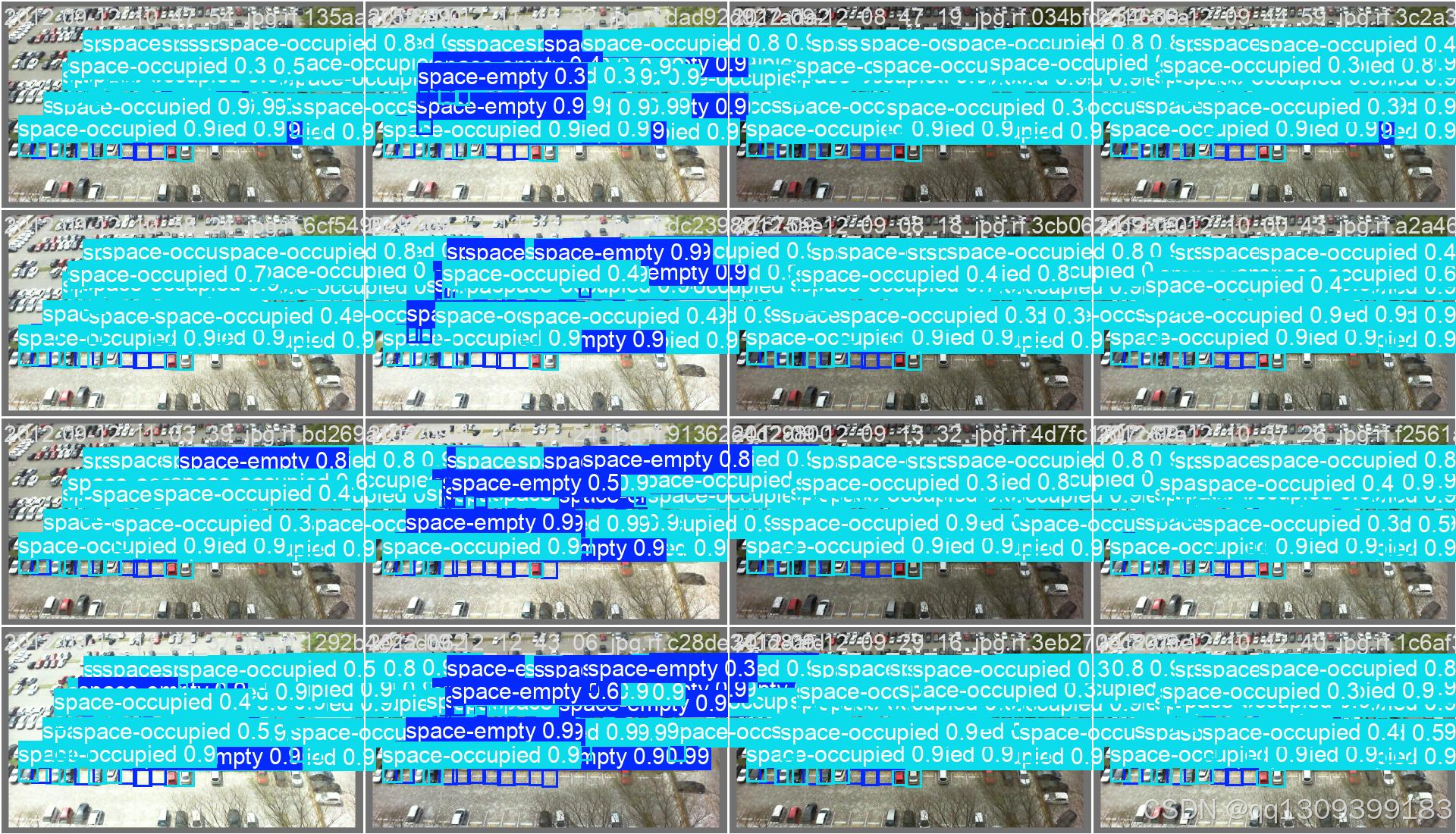
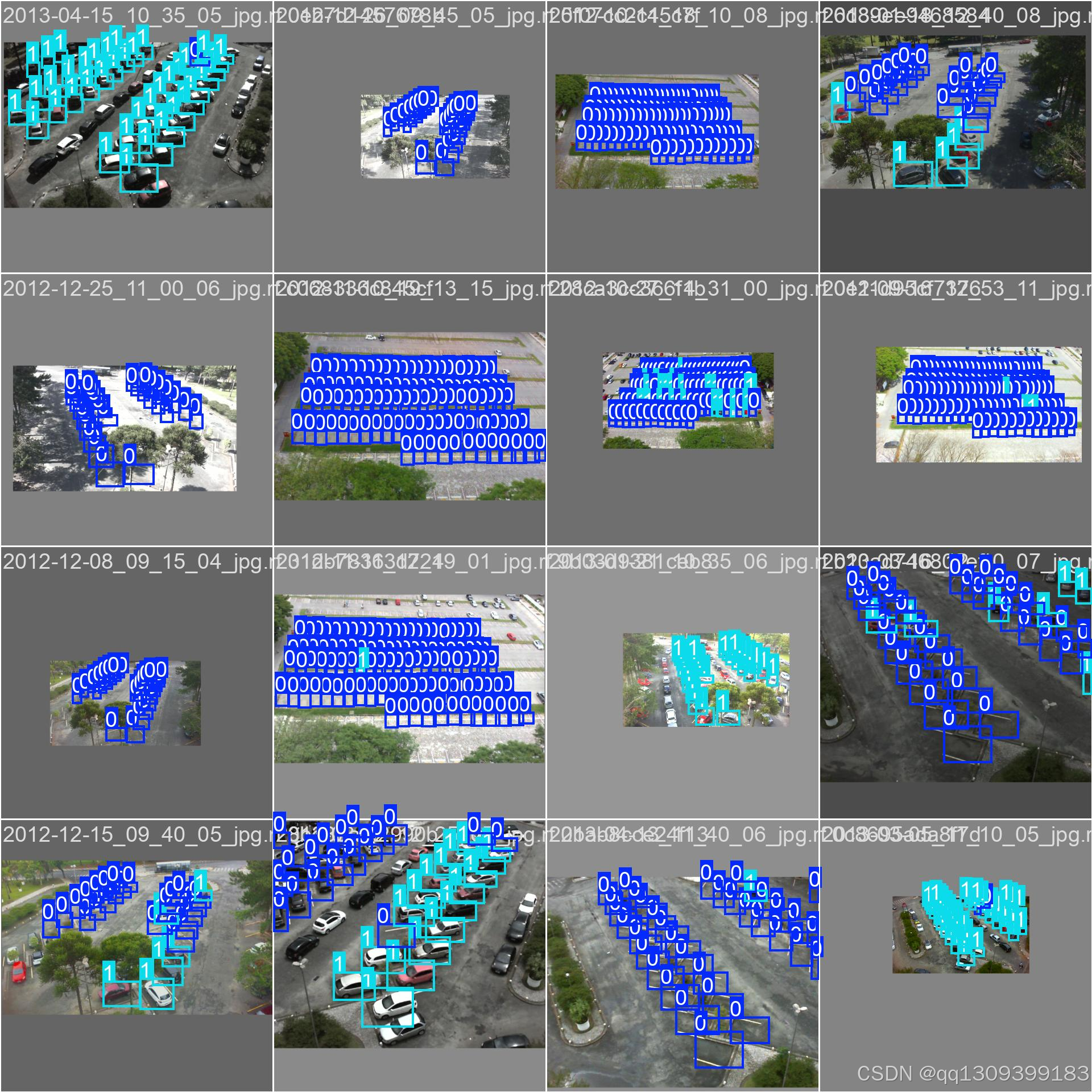
📊 实验结果
训练后模型表现优异(详见Colab示例图像)
🔮 未来改进
- 通过数据增强和延长训练提升精度
- 开发IoT仪表盘远程监控车位状态
- 采用TensorRT/OpenVINO优化边缘端推理效率
(注:本系统可作为智慧城市基础设施的低成本解决方案原型)


















 483
483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









