







简单使用
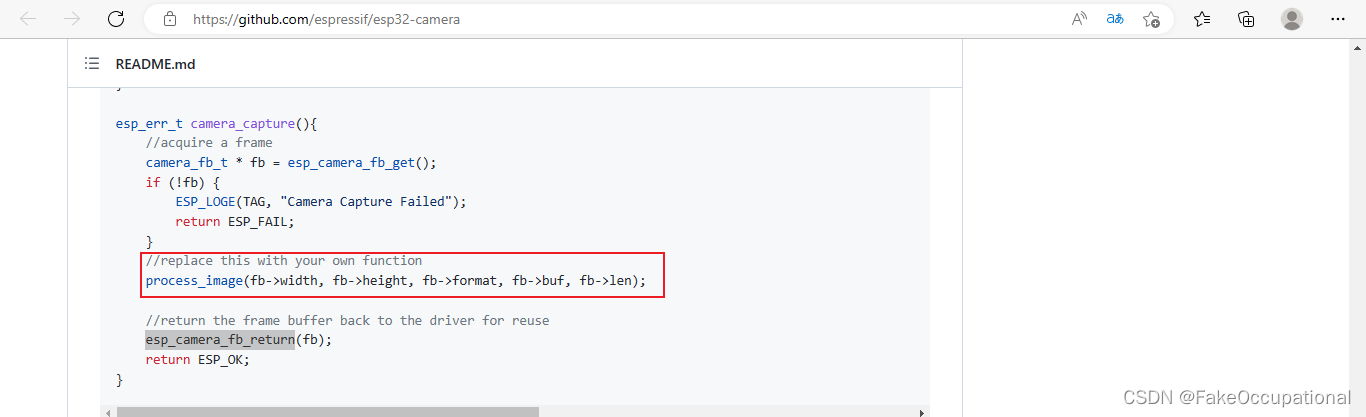
- 去github官方看看camera是如何调用的,按照官方的提示进行简单的修改
Serial.println(fb->len); //Serial.println(fb->width); Serial.println(fb->height);Serial.println(fb->format);
全部代码
#include "esp_camera.h"
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
static camera_config_t camera_config = {
.pin_pwdn = PWDN_GPIO_NUM,
.pin_reset = RESET_GPIO_NUM,
.pin_xclk = XCLK_GPIO_NUM,
.pin_sscb_sda = SIOD_GPIO_NUM,
.pin_sscb_scl = SIOC_GPIO_NUM,
.pin_d7 = Y9_GPIO_NUM,
.pin_d6 = Y8_GPIO_NUM,
.pin_d5 = Y7_GPIO_NUM,
.pin_d4 = Y6_GPIO_NUM,
.pin_d3 = Y5_GPIO_NUM,
.pin_d2 = Y4_GPIO_NUM,
.pin_d1 = Y3_GPIO_NUM,
.pin_d0 = Y2_GPIO_NUM,
.pin_vsync = VSYNC_GPIO_NUM,
.pin_href = HREF_GPIO_NUM,
.pin_pclk = PCLK_GPIO_NUM,
//XCLK 20MHz or 10MHz for OV2640 double FPS (Experimental)
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_RGB565,//YUV422,GRAYSCALE,RGB565,JPEG
.frame_size = FRAMESIZE_QQVGA,//QQVGA-QXGA Do not use sizes above QVGA when not JPEG
.jpeg_quality = 12, //0-63 lower number means higher quality
.fb_count = 1 //if more than one, i2s runs in continuous mode. Use only with JPEG
};
esp_err_t camera_init(){
//initialize the camera
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK) {
Serial.print("Camera Init Failed");
return err;
}
return ESP_OK;
}
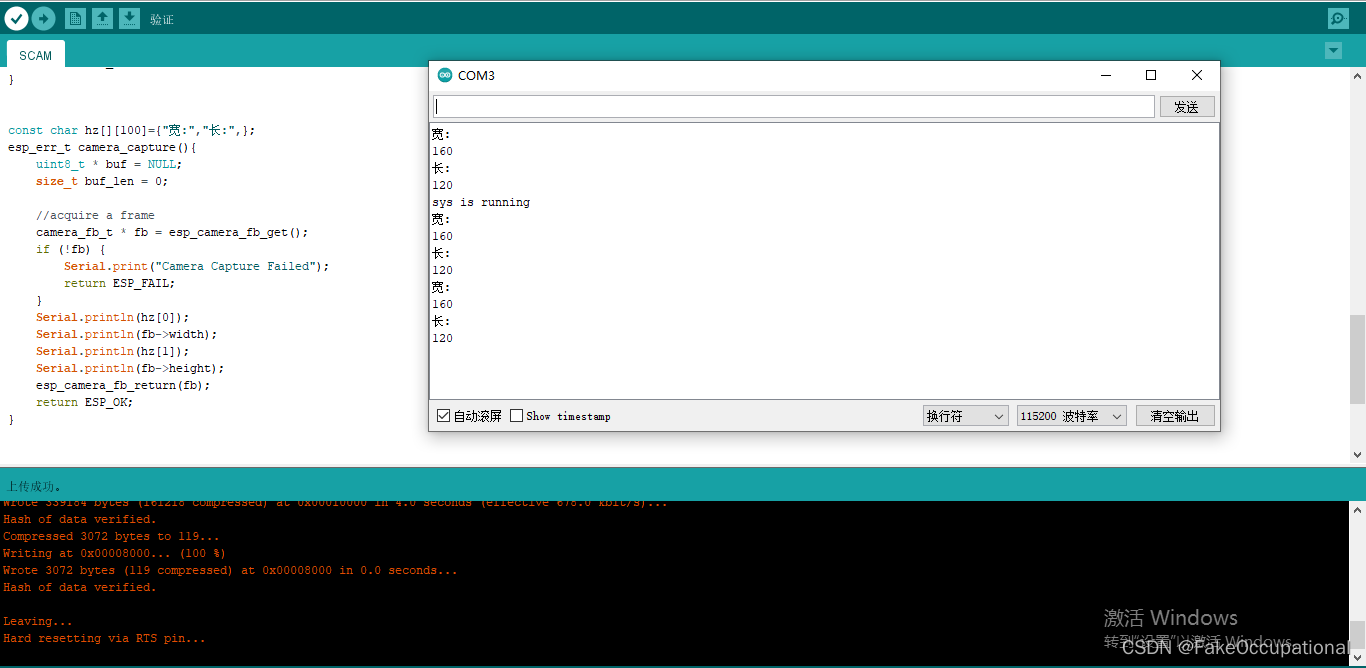
esp_err_t camera_capture(){
uint8_t * buf = NULL;
size_t buf_len = 0;
//acquire a frame
camera_fb_t * fb = esp_camera_fb_get();
if (!fb) {
Serial.print("Camera Capture Failed");
return ESP_FAIL;
}
Serial.println(fb->len); //Serial.println(fb->width); Serial.println(fb->height);Serial.println(fb->format);
esp_camera_fb_return(fb);
return ESP_OK;
}
void setup() {
Serial.begin(115200);
camera_init(); //摄像头初始化
camera_capture(); //摄像头获取图像
Serial.println("sys is running");
}
void loop() {
camera_capture();
}
效果
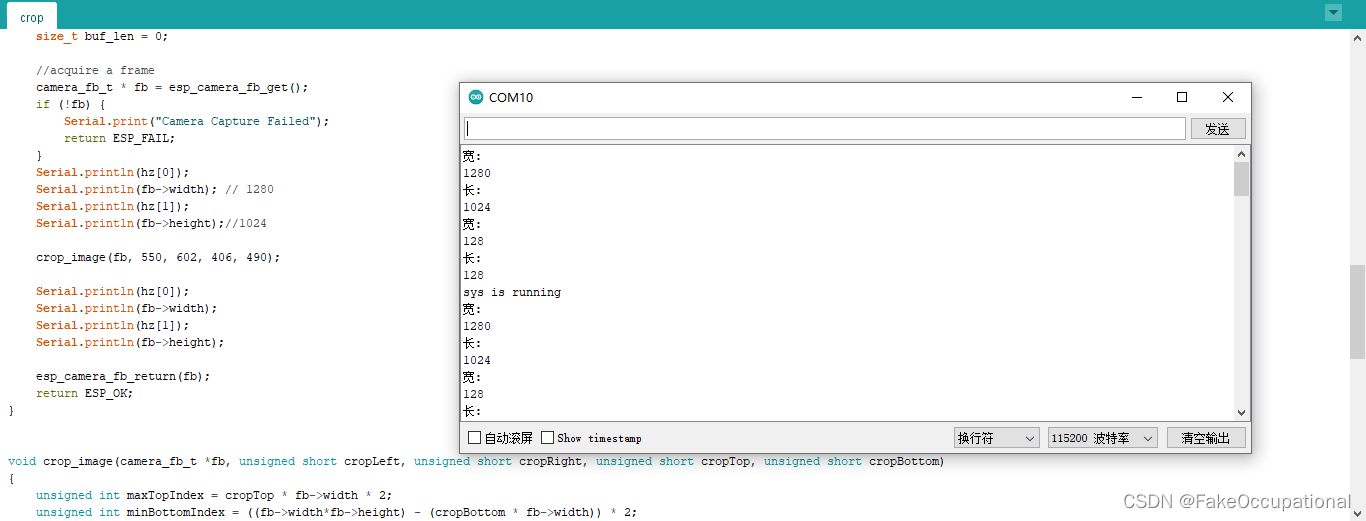
crop
#include "esp_camera.h"
#include "stream.h"
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
static camera_config_t camera_config = {
.pin_pwdn = PWDN_GPIO_NUM,
.pin_reset = RESET_GPIO_NUM,
.pin_xclk = XCLK_GPIO_NUM,
.pin_sscb_sda = SIOD_GPIO_NUM,
.pin_sscb_scl = SIOC_GPIO_NUM,
.pin_d7 = Y9_GPIO_NUM,
.pin_d6 = Y8_GPIO_NUM,
.pin_d5 = Y7_GPIO_NUM,
.pin_d4 = Y6_GPIO_NUM,
.pin_d3 = Y5_GPIO_NUM,
.pin_d2 = Y4_GPIO_NUM,
.pin_d1 = Y3_GPIO_NUM,
.pin_d0 = Y2_GPIO_NUM,
.pin_vsync = VSYNC_GPIO_NUM,
.pin_href = HREF_GPIO_NUM,
.pin_pclk = PCLK_GPIO_NUM,
//XCLK 20MHz or 10MHz for OV2640 double FPS (Experimental)
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_RGB565,//YUV422,GRAYSCALE,RGB565,JPEG
.frame_size = FRAMESIZE_SXGA,//QQVGA-QXGA Do not use sizes above QVGA when not JPEG
.jpeg_quality = 12, //0-63 lower number means higher quality
.fb_count = 1 //if more than one, i2s runs in continuous mode. Use only with JPEG
};
esp_err_t camera_init(){
//initialize the camera
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK) {
Serial.print("Camera Init Failed");
return err;
}
return ESP_OK;
}
const char hz[][100]={"宽:","长:",};
esp_err_t camera_capture(){
uint8_t * buf = NULL;
size_t buf_len = 0;
//acquire a frame
camera_fb_t * fb = esp_camera_fb_get();
if (!fb) {
Serial.print("Camera Capture Failed");
return ESP_FAIL;
}
Serial.println(hz[0]);
Serial.println(fb->width); // 1280
Serial.println(hz[1]);
Serial.println(fb->height);//1024
crop_image(fb, 550, 602, 406, 490);
Serial.println(hz[0]);
Serial.println(fb->width);
Serial.println(hz[1]);
Serial.println(fb->height);
esp_camera_fb_return(fb);
return ESP_OK;
}
void crop_image(camera_fb_t *fb, unsigned short cropLeft, unsigned short cropRight, unsigned short cropTop, unsigned short cropBottom)
{
unsigned int maxTopIndex = cropTop * fb->width * 2;
unsigned int minBottomIndex = ((fb->width*fb->height) - (cropBottom * fb->width)) * 2;
unsigned short maxX = fb->width - cropRight; // In pixels
unsigned short newWidth = fb->width - cropLeft - cropRight;
unsigned short newHeight = fb->height - cropTop - cropBottom;
size_t newJpgSize = newWidth * newHeight *2;
unsigned int writeIndex = 0;
// Loop over all bytes
for(int i = 0; i < fb->len; i+=2){
// Calculate current X, Y pixel position
int x = (i/2) % fb->width;
// Crop from the top
if(i < maxTopIndex){ continue; }
// Crop from the bottom
if(i > minBottomIndex){ continue; }
// Crop from the left
if(x <= cropLeft){ continue; }
// Crop from the right
if(x > maxX){ continue; }
// If we get here, keep the pixels
fb->buf[writeIndex++] = fb->buf[i];
fb->buf[writeIndex++] = fb->buf[i+1];
}
// Set the new dimensions of the framebuffer for further use.
fb->width = newWidth;
fb->height = newHeight;
fb->len = newJpgSize;
}
void setup() {
Serial.begin(115200);
camera_init(); //摄像头初始化
camera_capture(); //摄像头获取图像
Serial.println("sys is running");
}
void loop() {
camera_capture();
}
# utf-8
import tensorflow as tf
import numpy as np
import pandas as pd
import matplotlib as mpl
import matplotlib.pyplot as plt
import os
from tensorflow import keras
import sys
import cv2
print(tf.__version__)
print(sys.version_info)
for module in mpl, pd, np, keras:
print(module.__name__, module.__version__)
# set path
train_dir = './input/train'
valid_dir = './input/validation'
test_dir = './input/test'
# set para
height = 1280
width = 1024
channel = 3
batch_size = 64
valid_batch_size = 64
num_classes = 2
epochs = 1
# train model
def trainModel(model, train_generator, valid_generator, callbacks):
history = model.fit(
train_generator,
epochs=epochs,
validation_data = valid_generator,
callbacks = callbacks
)
return history
# show the changes of loss and accuracy during training
def plot_learning_curves(history, label, epochs, min_value, max_value):
data = {}
data[label] = history.history[label]
data['val_' + label] = history.history['val_' + label]
pd.DataFrame(data).plot(figsize=(8, 5))
plt.grid(True)
plt.axis([0, epochs, min_value, max_value])
plt.show()
# use the model after finish training to classify images and save them into two different folders
def predictModel(model, output_model_file):
# load the weights of model
model.load_weights(output_model_file)
os.makedirs('./save', exist_ok=True)
os.makedirs('./save/cat', exist_ok=True)
os.makedirs('./save/dog', exist_ok=True)
test_dir = './input/test1/' # 1-12500.jpg
for i in range(1, 12500):
img_name = test_dir + '{}.jpg'.format(i)
img = cv2.imread(img_name)
img = cv2.resize(img, (width, height))
img_arr = img / 255.0
img_arr = img_arr.reshape((1, width, height, 3))
pre = model.predict(img_arr)
if pre[0][0] > pre[0][1]:
cv2.imwrite('./save/cat/' + '{}.jpg'.format(i), img)
print(img_name, ' is classified as Cat.')
else:
cv2.imwrite('./save/dog/' + '{}.jpg'.format(i), img)
print(img_name, ' is classified as Dog.')
if __name__ == '__main__':
print('Start importing data...')
# import the data and make a augmentation
train_datagen = keras.preprocessing.image.ImageDataGenerator(
rescale=1,#. / 255, todo
rotation_range=40,
width_shift_range=0.2,
height_shift_range=0.2,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True,
fill_mode='nearest',
)
train_generator = train_datagen.flow_from_directory(
train_dir,
target_size=(width, height),
batch_size=batch_size,
seed=7,
shuffle=True,
class_mode='categorical'
)
valid_datagen = keras.preprocessing.image.ImageDataGenerator(
rescale=1. / 255,
)
valid_generator = valid_datagen.flow_from_directory(
valid_dir,
target_size=(width, height),
batch_size=valid_batch_size,
seed=7,
shuffle=False,
class_mode="categorical"
)
train_num = train_generator.samples
valid_num = valid_generator.samples
# print(train_num, valid_num)
print('Building model...')
# Build model
model = keras.models.Sequential([
keras.layers.MaxPool2D(pool_size=4,
input_shape=[width, height, channel]),
keras.layers.Conv2D(filters=32, kernel_size=3,
padding='valid', activation='relu'),
keras.layers.MaxPool2D(pool_size=4),
keras.layers.Conv2D(filters=32, kernel_size=3,
padding='valid', activation='relu'),
keras.layers.MaxPool2D(pool_size=2),
# keras.layers.Conv2D(filters=64, kernel_size=3,
# padding='same', activation='relu'),
# keras.layers.Conv2D(filters=64, kernel_size=3,
# padding='same', activation='relu'),
# keras.layers.MaxPool2D(pool_size=2),
keras.layers.Conv2D(filters=12, kernel_size=3,
padding='same', activation='relu'),
keras.layers.Conv2D(filters=12, kernel_size=3,
padding='same', activation='relu'),
keras.layers.MaxPool2D(pool_size=2),
keras.layers.Flatten(),
keras.layers.Dense(4, activation='relu'),
keras.layers.Dense(num_classes, activation='softmax')
])
model.compile(loss='categorical_crossentropy',
optimizer='adam', metrics=['accuracy'])
model.summary()
# set path of saving model
logdir = './graph_def_and_weights'
if not os.path.exists(logdir):
os.mkdir(logdir)
output_model_file = os.path.join(logdir,
"catDog_weights.h5")
print('Start training ...')
# start training
mode = '1' #input('Select mode: 1.Train 2.Predict\nInput number: ')
if mode == '1':
callbacks = [
keras.callbacks.TensorBoard(logdir),
keras.callbacks.ModelCheckpoint(output_model_file,
save_best_only=True,
save_weights_only=True),
keras.callbacks.EarlyStopping(patience=5, min_delta=1e-3)
]
history = trainModel(model, train_generator, valid_generator, callbacks)
plot_learning_curves(history, 'accuracy', epochs, 0, 1)
plot_learning_curves(history, 'loss', epochs, 0, 5)
elif mode == '2':
# Only run this mode if you have already finished training your model and saved it.
predictModel(model, output_model_file)
else:
print('Please input the correct number.')
print('Finish! Exit.')
# Convertir modelo al formato tensorflow lite
converter = tf.lite.TFLiteConverter.from_keras_model(model)
tflite_model = converter.convert()
# Guardar modelo en el disco
open("model.tflite", "wb").write(tflite_model)
from tinymlgen import port
# Convertir modelo en un array C
c_code = port(model, pretty_print=True)
print(c_code)
with open('model.h', 'w') as f:
f.write(c_code)
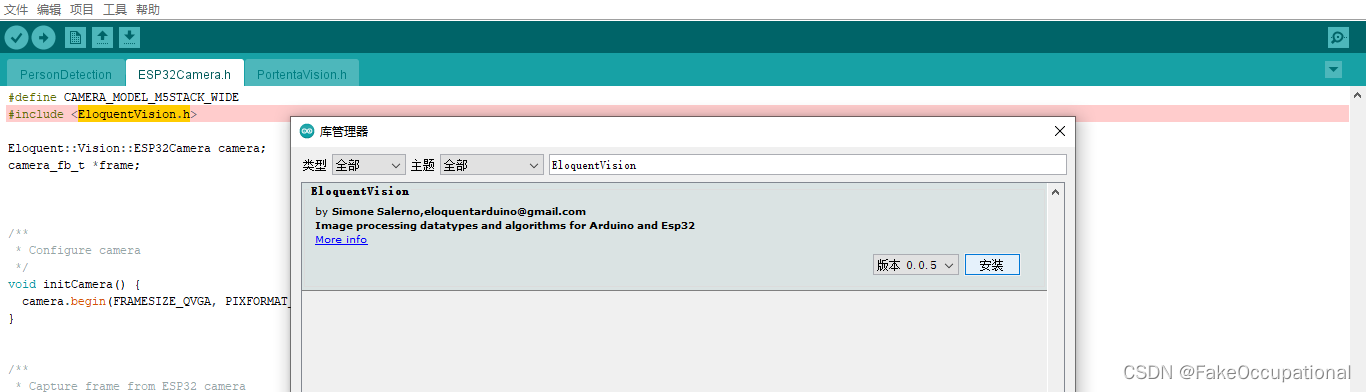
EloquentVision
- 这个例子是machine learing的例子,来自另一个包,但是没运行成功,说检测不到我的摄像头,可能是官方没有和我板子的gpio匹配
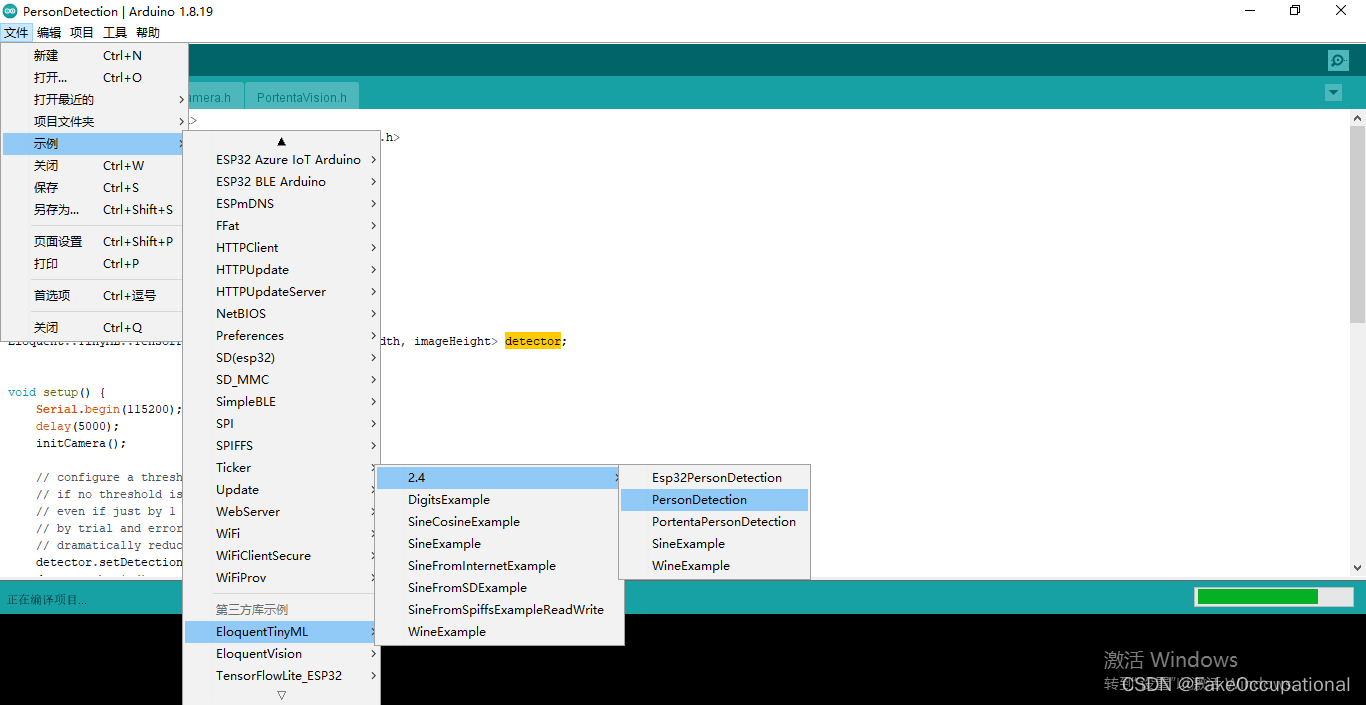
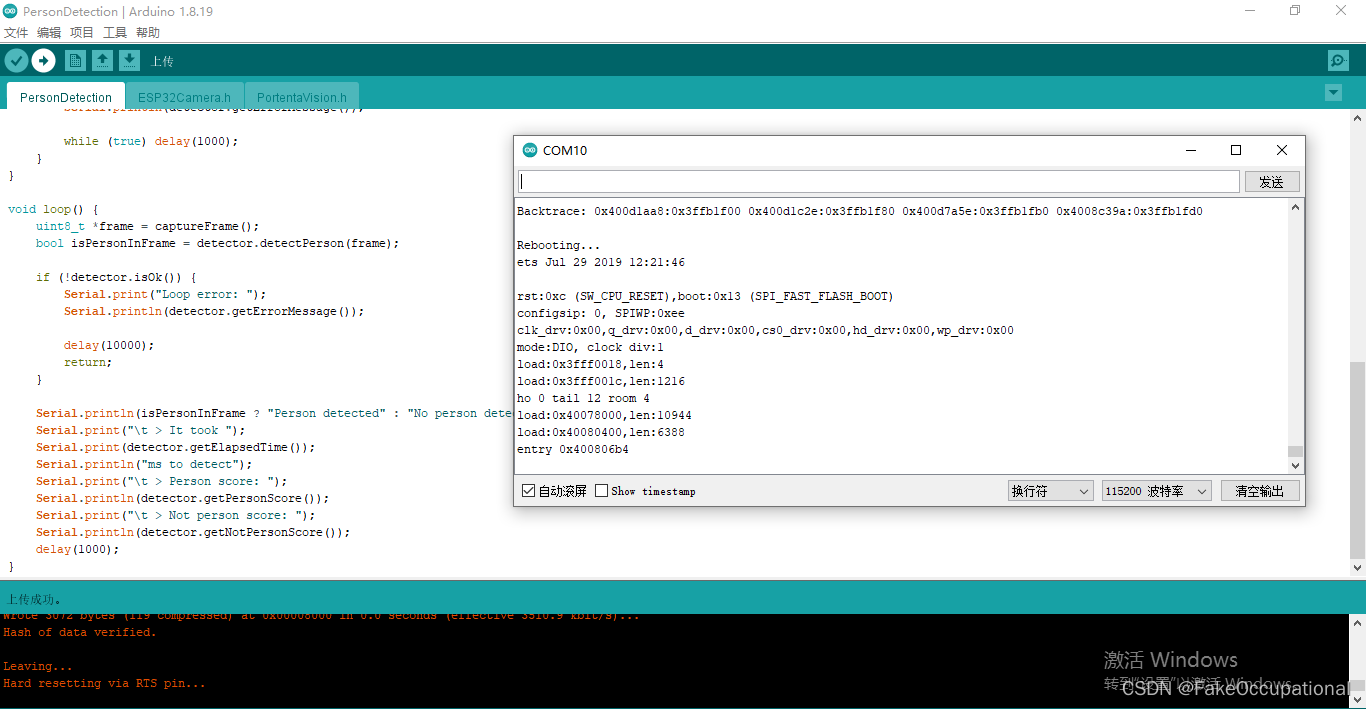
- Detected camera not supported
load:0x3fff001c,len:1216
ho 0 tail 12 room 4
load:0x40078000,len:10944
load:0x40080400,len:6388
entry 0x400806b4
[E][camera.c:1113] camera_probe(): Detected camera not supported.
[E][camera.c:1379] esp_camera_init(): Camera probe failed with error 0x20004
Guru Meditation Error: Core 1 panic'ed (LoadProhibited). Exception was unhandled.
Core 1 register dump:
PC : 0x400d1aa8 PS : 0x00060530 A0 : 0x800d1c31 A1 : 0x3ffb1f00
A2 : 0x00000005 A3 : 0x00000001 A4 : 0x0800001c A5 : 0x00000003
A6 : 0x00000003 A7 : 0x00000000 A8 : 0x800d1aa6 A9 : 0x3ffb1ee0
A10 : 0x00000000 A11 : 0x00000005 A12 : 0x3ffbdc14 A13 : 0x00000003
A14 : 0x00000001 A15 : 0x00000000 SAR : 0x00000004 EXCCAUSE: 0x0000001c
EXCVADDR: 0x00000040 LBEG : 0x40089ded LEND : 0x40089dfd LCOUNT : 0xfffffffb
cg
- https://savjee.be/blog/esp32-cam-cropping-images-on-device/















 4142
4142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









