







 本文详细介绍了Halcon的create_pose算子,用于创建3D位姿,包括沿x、y、z轴的平移参数TransX、TransY、TransZ和绕x、y、z轴的旋转参数RotX、RotY、RotZ。同时讨论了旋转和平移的顺序、旋转的多种表示方法以及如何获取与姿势对应的齐次变换矩阵。
本文详细介绍了Halcon的create_pose算子,用于创建3D位姿,包括沿x、y、z轴的平移参数TransX、TransY、TransZ和绕x、y、z轴的旋转参数RotX、RotY、RotZ。同时讨论了旋转和平移的顺序、旋转的多种表示方法以及如何获取与姿势对应的齐次变换矩阵。
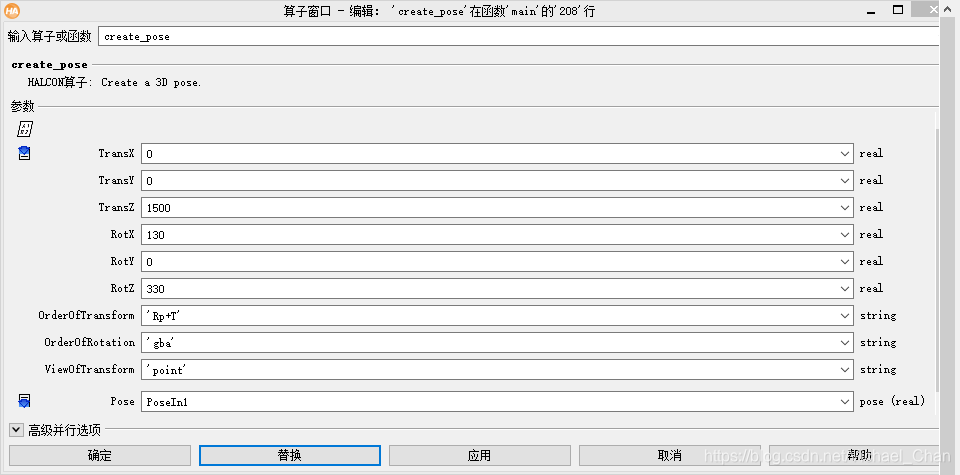
create_pose
创建3D位姿
( : : TransX, TransY, TransZ, RotX, RotY, RotZ, OrderOfTransform, OrderOfRotation, ViewOfTransform : Pose)
输入:
-
TransX
沿x轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
TransY
沿y轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
TransZ
沿z轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
RotX
绕Rodriguez向量的x轴或x分量旋转(以[°]为单位或无单位)。
默认值:90.0
建议值:0.0、90.0、180.0、270.0
典型值范围:0≤RotX≤360 -
RotY
绕Rodriguez向量的y轴或y分量旋转(以[°]为单位或无单位)。
默认值:90.0
建议值:0.0、90.0、180.0、270.0
典型值范围:0≤R
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 631
631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









