







文章目录
一、启动Moveit Setup Assistant
#---------------------------------------------------------------------------------
终端1:
roscore
终端2:
source devel/setup.bash
rosrun moveit_setup_assistant moveit_setup_assistant
#---------------------------------------------------------------------------------
二、配置
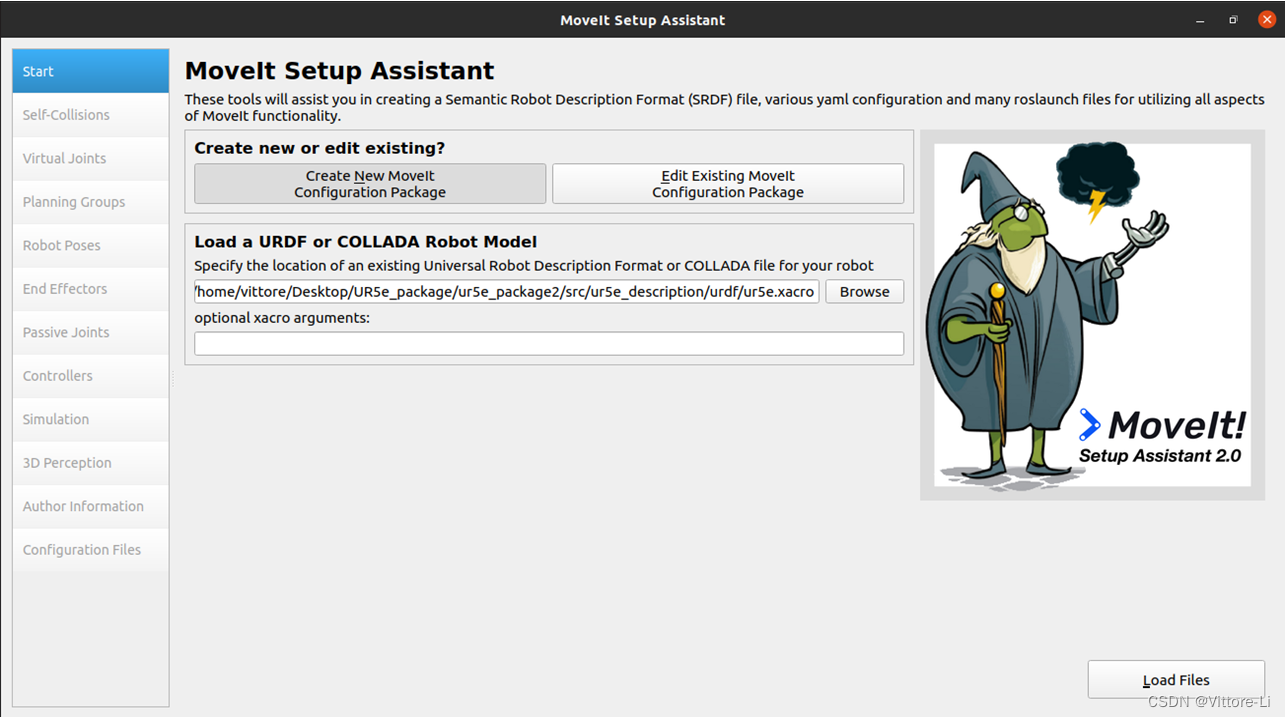
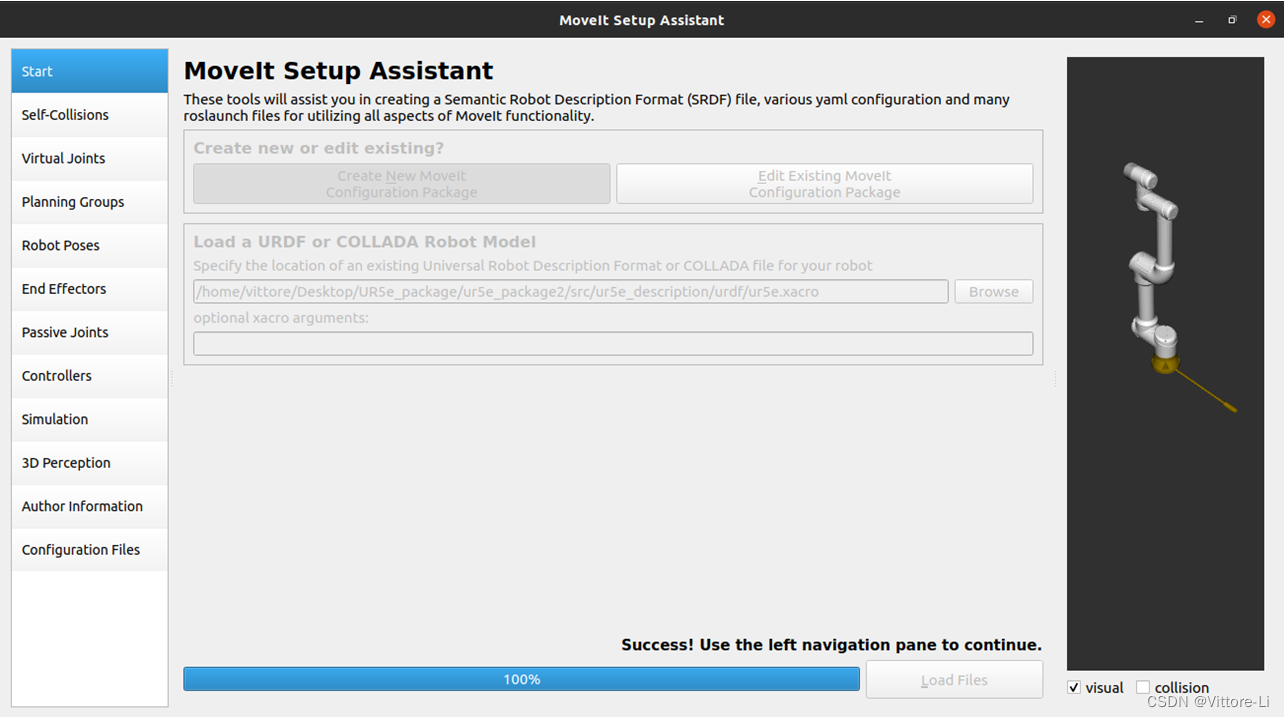
1.加载模型
选择创建的xacro文件,点击Load Files,加载的模型会自动显示出来。
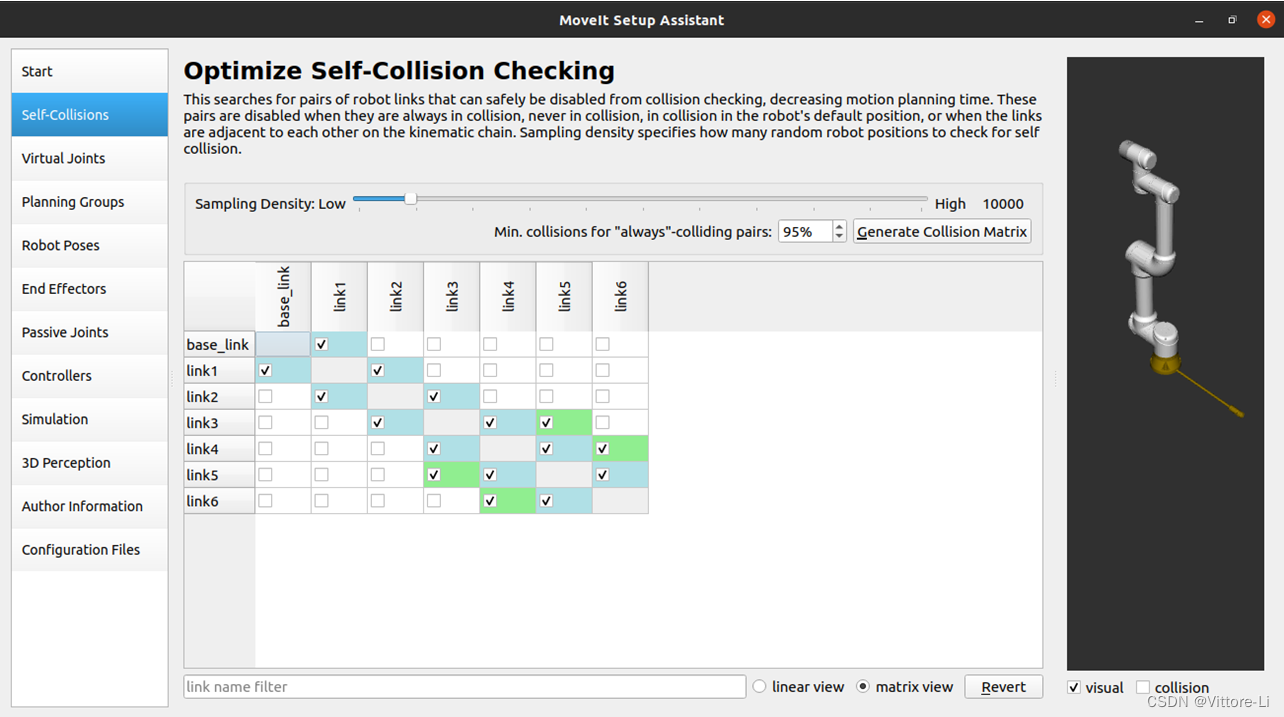
2.配置自碰撞检测
点击Generate Collision Matrix
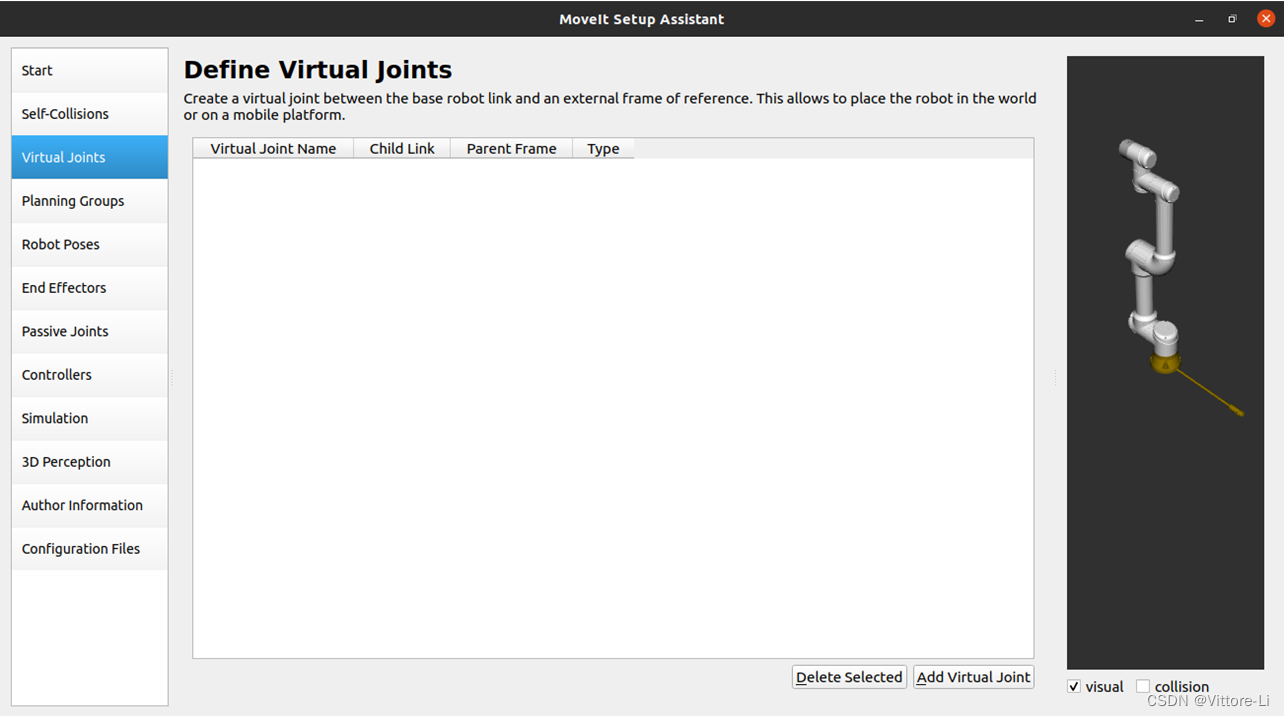
3.配置虚拟关节
一般工业六轴机器人、协作机器人没有虚拟轴,而工业四轴机器人会有虚拟轴,这一步可以忽略。
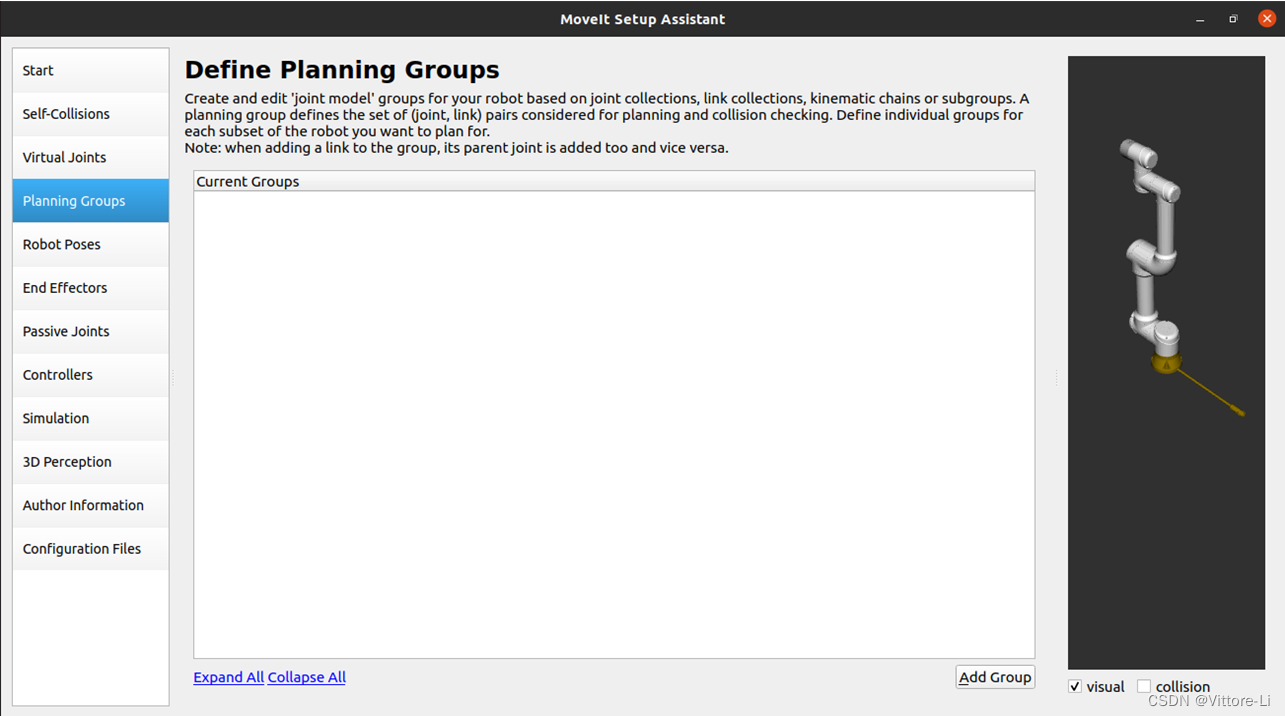
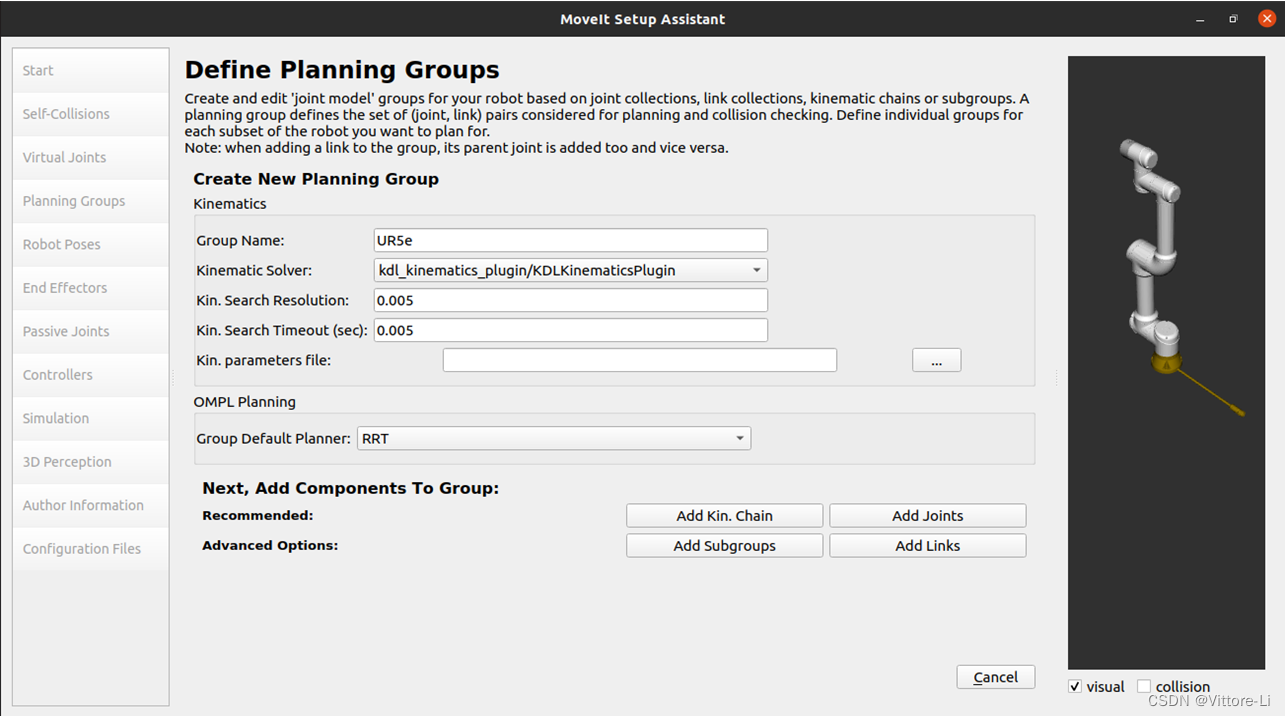
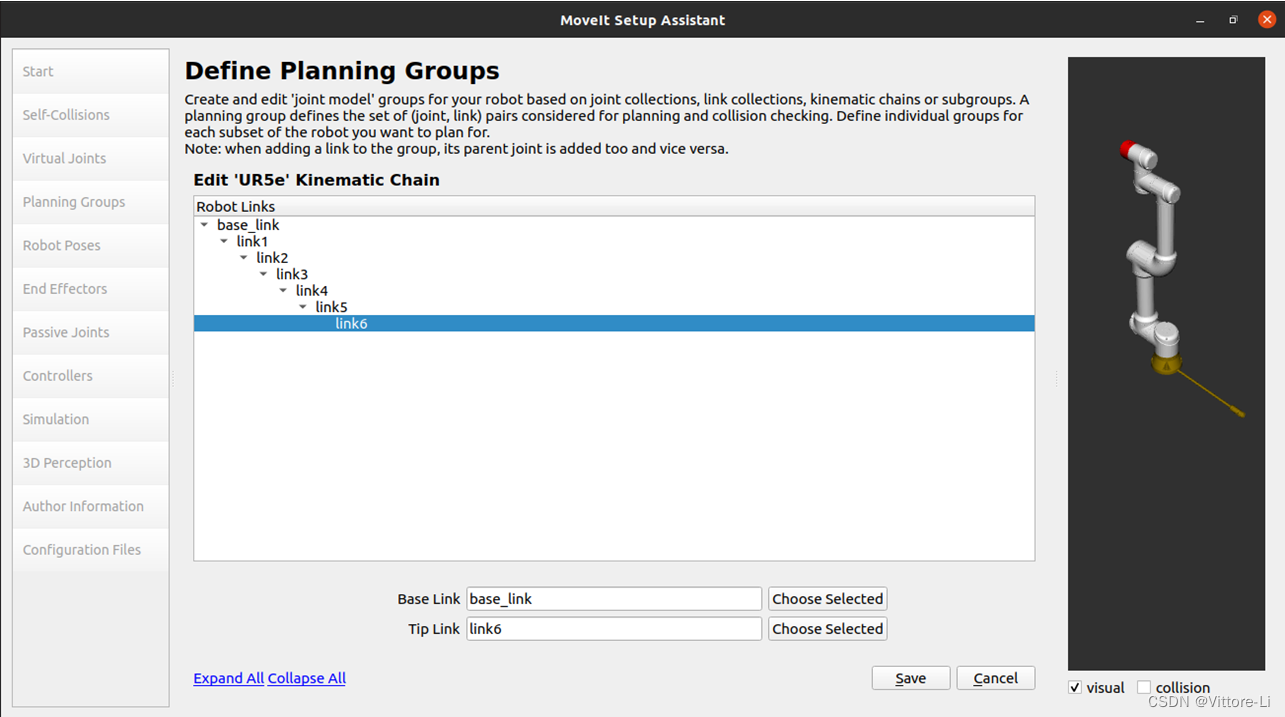
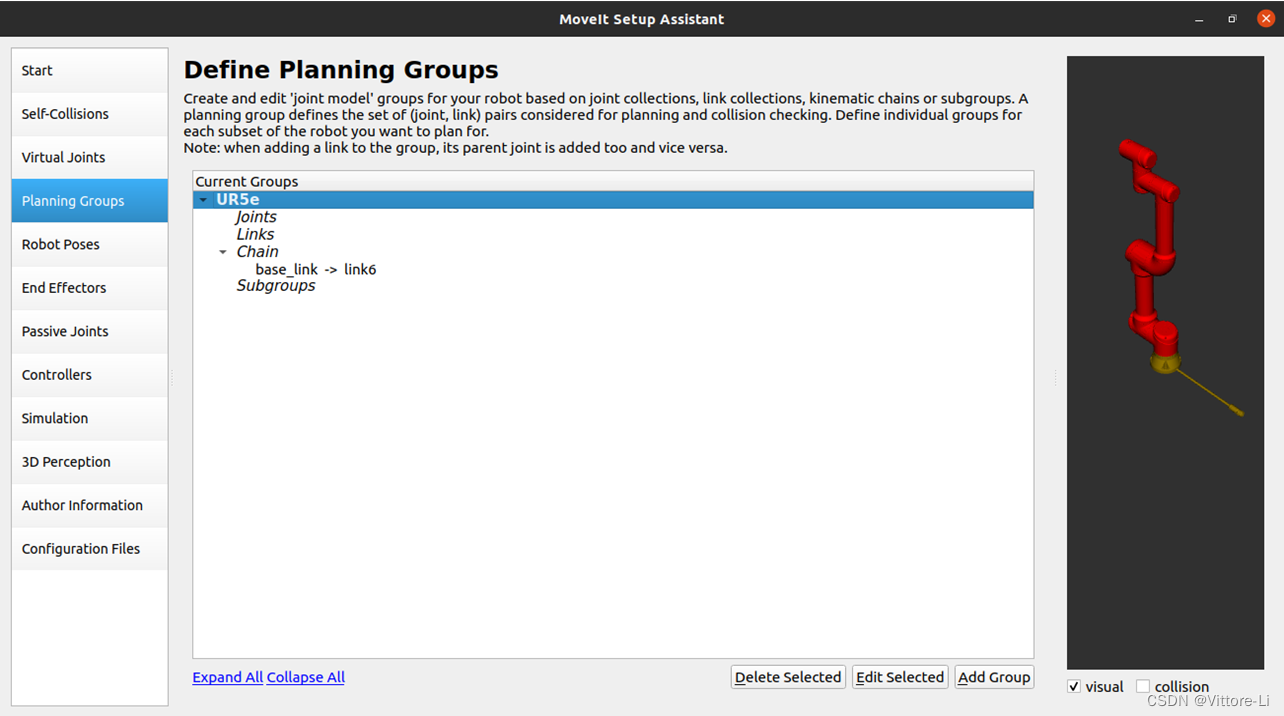
4.配置规划组
添加规划组,配置默认按照图二进行,parameters file这里填不填看个人情况(我的不填不会报错,填了就会报错),点击Add Kin.Chain 分别将base_link作为固定基座,link6作为末端可拖动关节
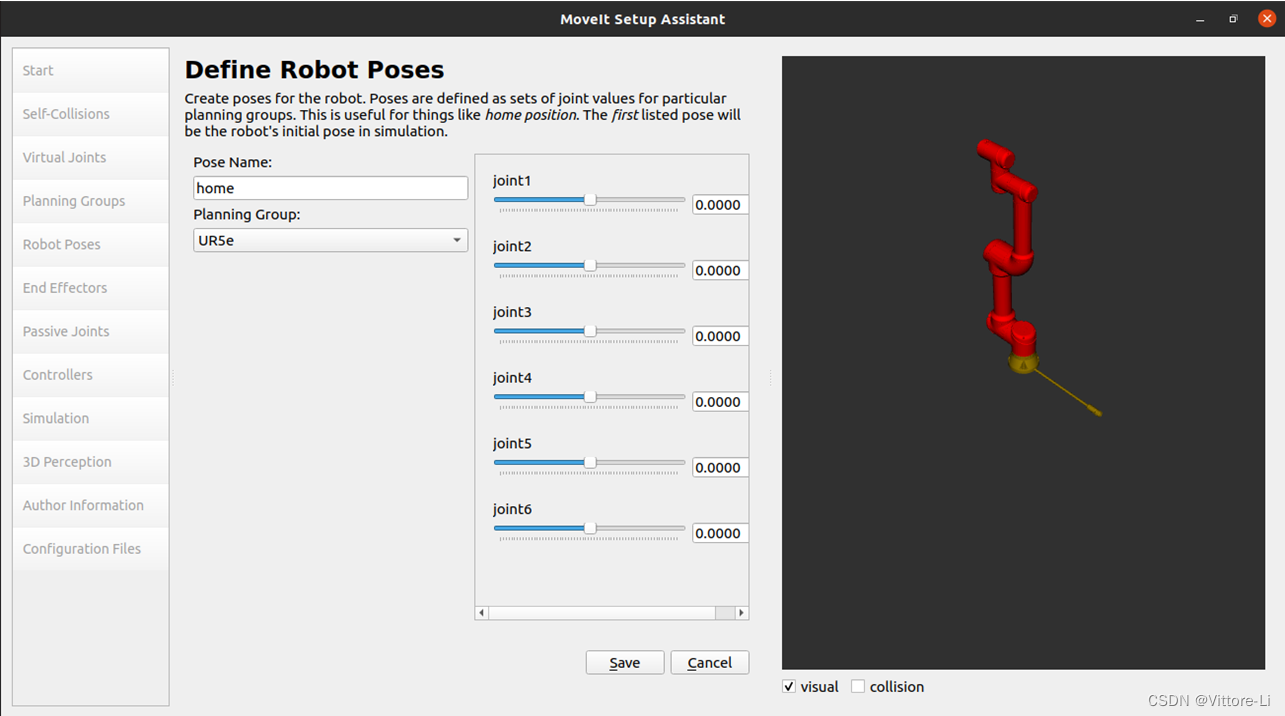
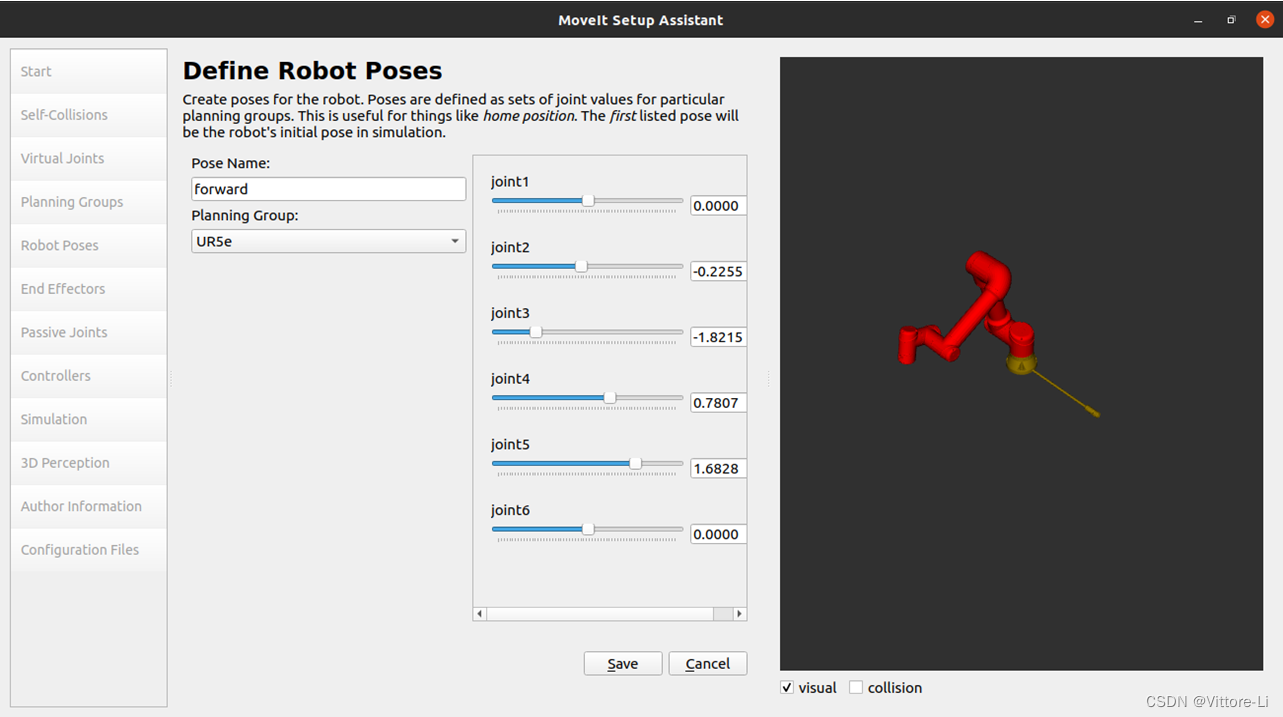
5.预定义机器人位姿
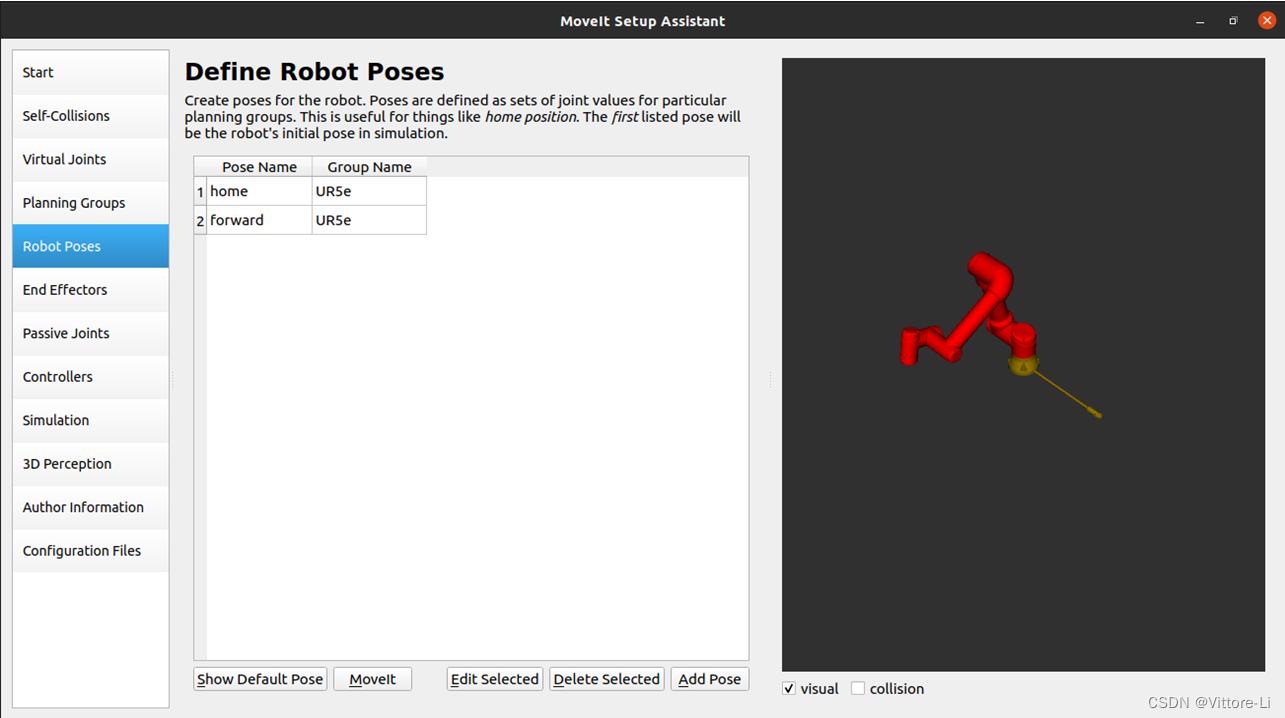
后面的步骤一律默认
6.配置末端执行器
7.配置被动关节
8.控制
9.Gazebo仿真
10.3D感知
11.作者信息
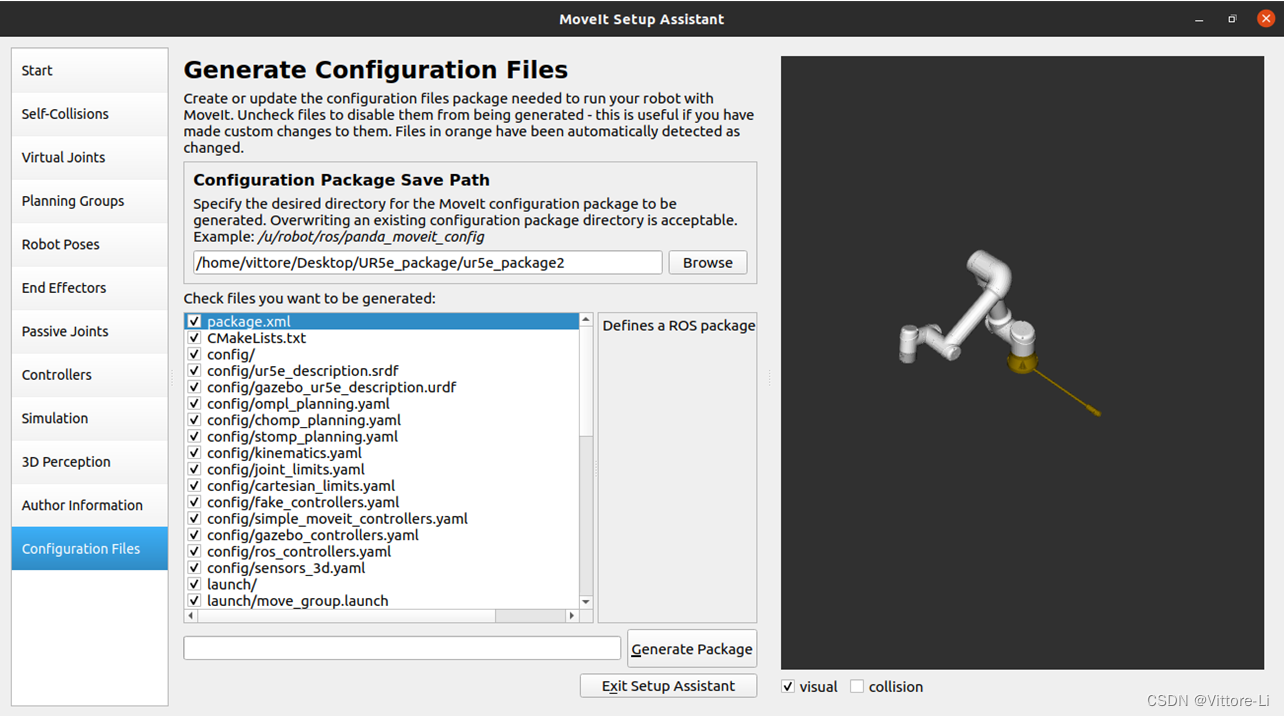
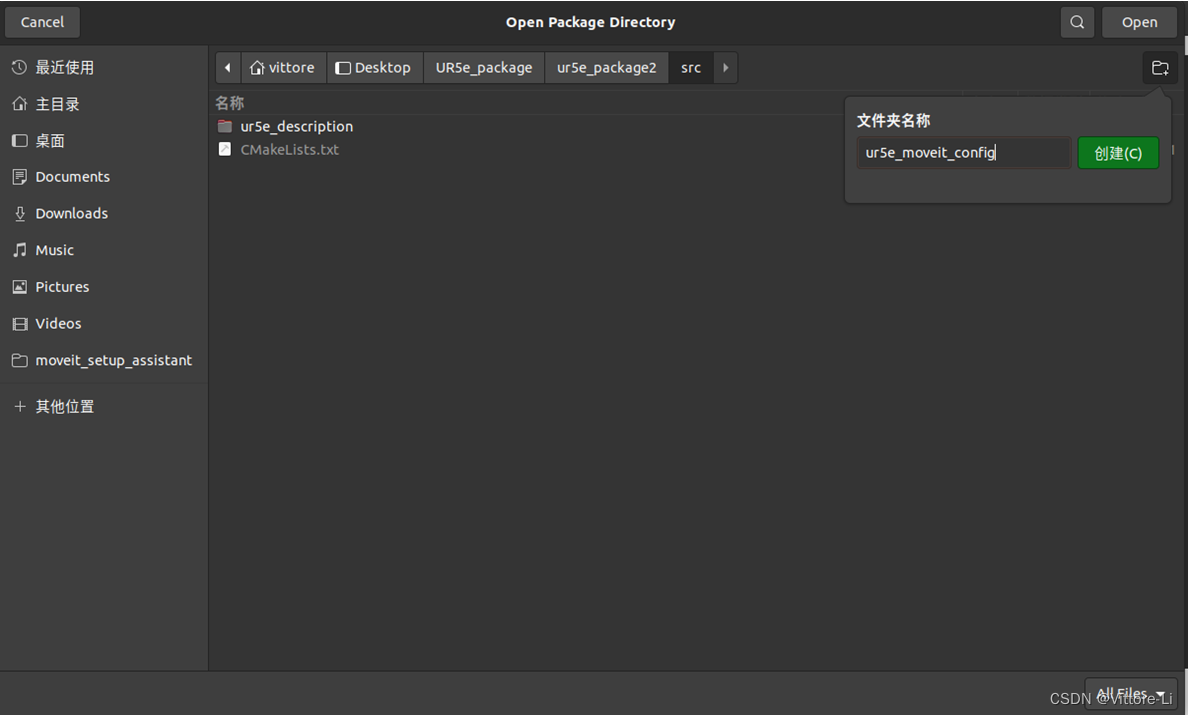
12.生成配置包
生成的文件保存到【ur5e_moveit_config】文件夹内
三、MoveIt+Rviz仿真
启动Rviz
#---------------------------------------------------------------------------------
source devel/setup.bash
roslaunch ur5e_moveit demo.launch
#---------------------------------------------------------------------------------
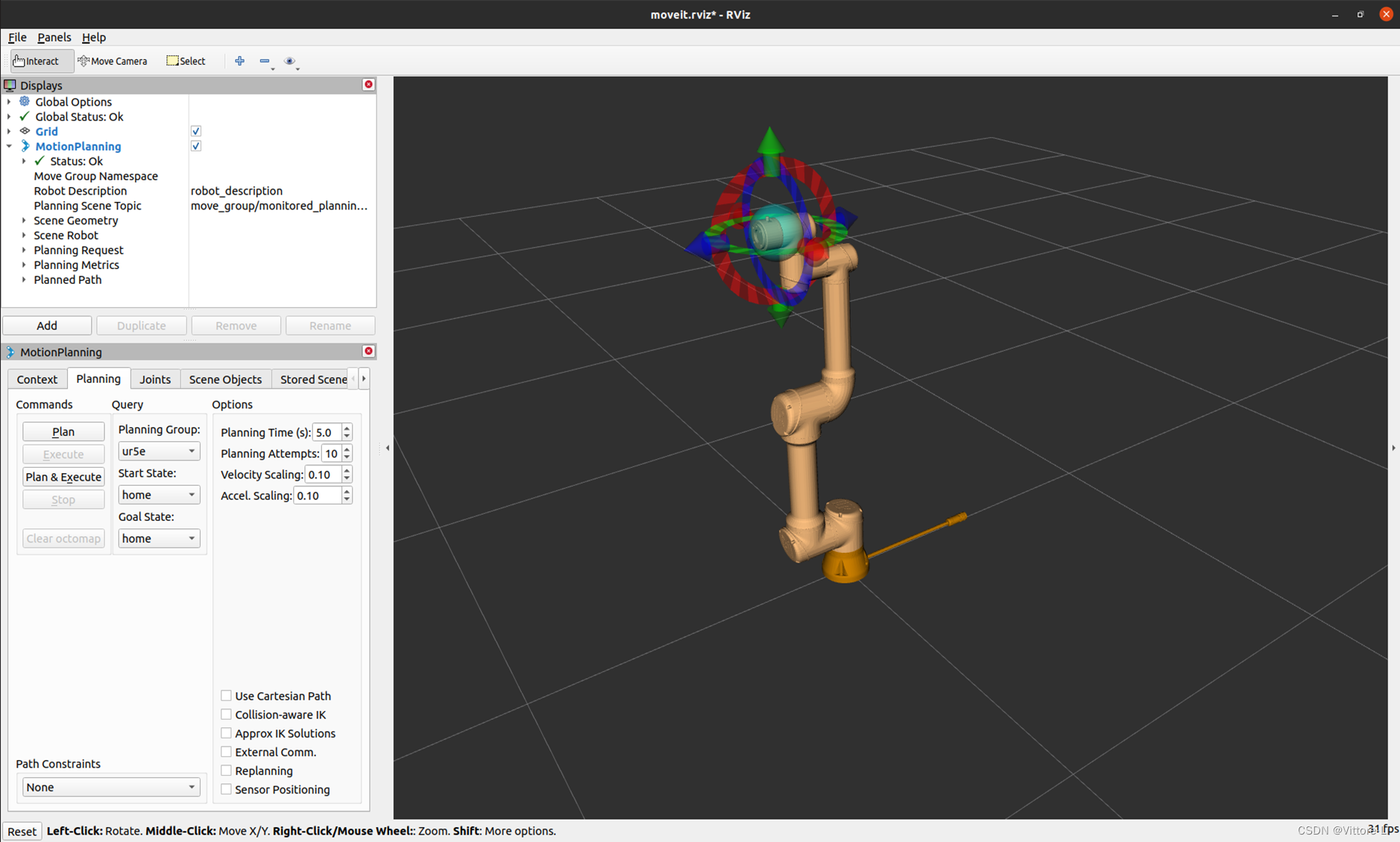
现在可以进行拖动示教了!
















 776
776











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











