







目录
概述
搬运是工业机器人最常见的一种应用,为了便于搬运机器人系统集成和示教编程,大部分厂商都为机器人开发了专门用于搬运的应用软件。
通常情况下,机器人的搬运应用软件会内置专门用于抓手工具电磁阀监控的I/O信号接口、专用操作按键、专用参数配置界面以及专用程序指令。
安川机器人厂商也为机器人提供了搬运应用软件选项,并且还支持在MotoSimEG-VRC中的虚拟机器人上添加和应用仿真。
搬运机器人工作站创建
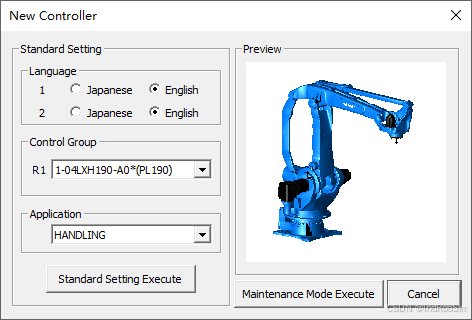
在MotoSimEG-VRC中创建安川机器人搬运应用虚拟控制器,控制器详细创建参数如下所示。
Create Controller:New VRC Controller (no file)
Controller Type:YRC1000
Controller Name:YRC1000
System Version:YAS4.74.00
Language:1.English,2.English
Control Group:1-04LXH-A0*(PL190)
Application:HANDLING
从MotoSimEG-VRC内置的模型库(Model Library)中添加机器人抓手工件模型、输送带模型、托盘模型,然后使用建模功能创建简易工件模型,并把所有模型布局到合适的位置。
创建好的安川搬运机器人工作站,如下图所示。
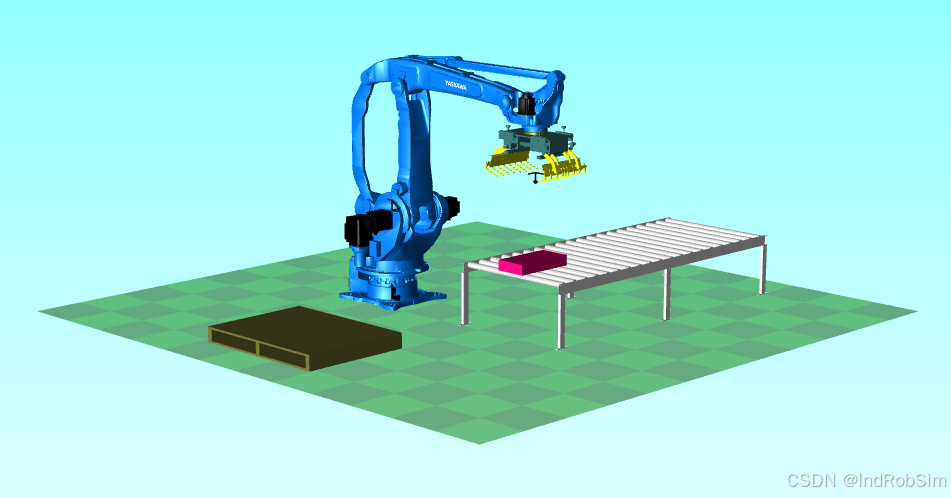
注:工件安装到输送带、抓手工具安装到机器人以及工具TCP标定等操作方法,可以查阅已发布的文章《MotoSimEG-VRC软件:机器人搬运虚拟仿真操作方法》,这里不再过多介绍。
搬运应用软件I/O信号映射关系
安川机器人搬运应用软件在系统中有专用的I/O信号,这些专用信号与机器人的外部I/O信号存在固定的映射关系。
搬运应用机器人专用输入信号与外部输入信号之间的映射关系,如下表所示。
| 逻辑编号 | 输入号 | 逻辑编号 | 输入号 | 说明 |
| #41140 | SIN#905 | #20050 | IN#17 | 传感器输入1 |
| #41141 | SIN#906 | #20051 | IN#18 | 传感器输入2 |
| #41142 | SIN#907 | #20052 | IN#19 | 传感器输入3 |
| #41143 | SIN#908 | #20053 | IN#20 | 传感器输入4 |
| #41144 | SIN#909 | #20054 | IN#21 | 传感器输入5 |
| #41145 | SIN#910 | #20055 | IN#22 | 传感器输入6 |
| #41146 | SIN#911 | #20056 | IN#23 | 传感器输入7 |
| #41147 | SIN#912 | #20057 | IN#24 | 传感器输入8 |
搬运应用机器人专用输出信号与外部输出信号之间的映射关系,如下表所示。
| 逻辑编号 | 输出号 | 逻辑编号 | 输出号 | 说明 |
| #51540 | SOUT#1225 | #30050 | OUT#17 | 抓手用阀门1-1 |
| #51541 | SOUT#1226 | #30051 | OUT#18 | 抓手用阀门1-2 |
| #51542 | SOUT#1227 | #30052 | OUT#19 | 抓手用阀门2-1 |
| #51543 | SOUT#1228 | #30053 | OUT#20 | 抓手用阀门2-2 |
| #51544 | SOUT#1229 | #30054 | OUT#21 | 抓手用阀门3-1 |
| #51545 | SOUT#1230 | #30055 | OUT#22 | 抓手用阀门3-2 |
| #51546 | SOUT#1231 | #30056 | OUT#23 | 抓手用阀门4-1 |
| #51547 | SOUT#1232 | #30057 | OUT#24 | 抓手用阀门4-2 |
安川机器人搬运应用软件中,有些接口通过辅助继电器映射到外部I/O信号上,以实现与外部设备的信号交互。
搬运应用机器人辅助继电器与外部输入信号之间的映射关系,如下表所示。
| 逻辑编号 | 逻辑编号 | 注释 | 说明 |
| #70053 | #20026 | INHB WEAVING | 抓手碰撞传感器输入 |
| #70054 | #20027 | INHB SENSING:1 | 气压下降输入 |
注:以上是安川机器人YRC1000系列控制器的I/O信号映射关系,其他系列的控制器I/O信号映射关系可能会有所不同。
抓手打开与关闭模型脚本编辑
MotoSimEG-VRC中,安川机器人抓手打开与关闭、工件抓取与放置的仿真动作是通过模型脚本实现的。
点击“Model Script Manager”命令按钮,打开模型脚本管理对话框,在其中添加抓手抓取工件的模型脚本DROP_C与抓手放置工件的模型脚本PICK_C,并编写对应动作的脚本程序。
抓手打开模型脚本的完整程序代码(DROP_C),如下所示。
AXIS6 Hand-Bag-M1=-241.868,162.468,135.179,0.00,-20.00,0.00 T=0,0 //打开抓手M1
AXIS6 Hand-Bag-M2=241.868,162.468,135.179,0.00,20.00,0.00 T=0,0 //打开抓手M2
MOV Work_C Pallet-1400Wx1100Lx150H T=0,0 //将工件放置到托盘上
OUT YRC1000 IN#(17)=OFF T=0,0 //复位机器人外部输入信号#17抓手关闭模型脚本的完整程序代码(PICK_C),如下所示。
AXIS6 Hand-Bag-M1=-241.868,162.468,135.179,0.00,0.00,0.00 T=0,0 //关闭抓手M1
AXIS6 Hand-Bag-M2=241.868,162.468,135.179,0.00,0.00,0.00 T=0,0 //关闭抓手M2
MOV Work_C YRC1000-R01_tcp T=0,0 //将工件抓取到机器人TCP上
OUT YRC1000 IN#(17)=ON T=0,0 //置位机器人外部输入信号#17注:模型脚本程序代码后的注释只用于本篇文章的代码语句解释,实际的模型脚本编辑器并不支持输入注释。
抓手控制I/O事件添加
如下图所示,创建I/O事件,使用机器人外部输出信号来触发抓手工具模型脚本的执行。
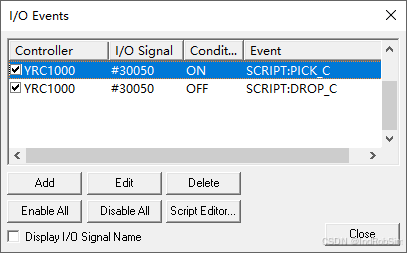
当然,模型脚本也可以通过机器人的注释指令来触发执行,有关这部分内容后期再来介绍。
搬运诊断配置
安川搬运机器人示教器的操作面板上有用于控制抓手打开与关闭的专用按键,系统中还有抓手碰撞传感器。要想使用这些功能,用户需要先在示教器上完成参数配置,配置操作在搬运诊断画面。
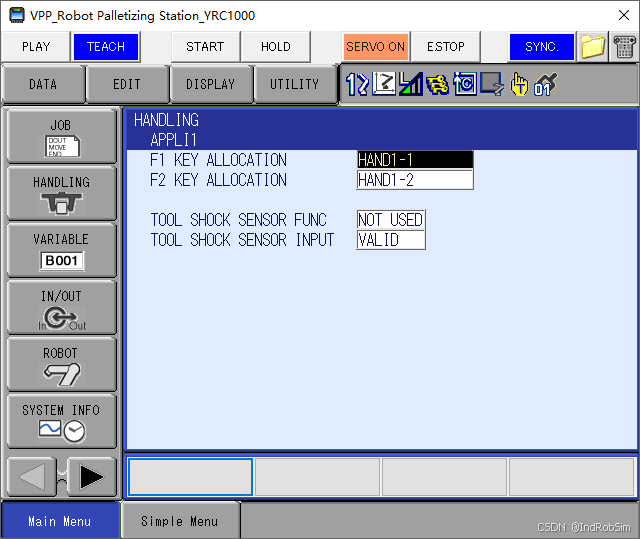
在机器人示教器上,依次选择“Main Menu”→“HANDLING”→“HANDLING DIAG.”,进入HANDLING APPLI1画面,即搬运诊断画面,如下图所示。
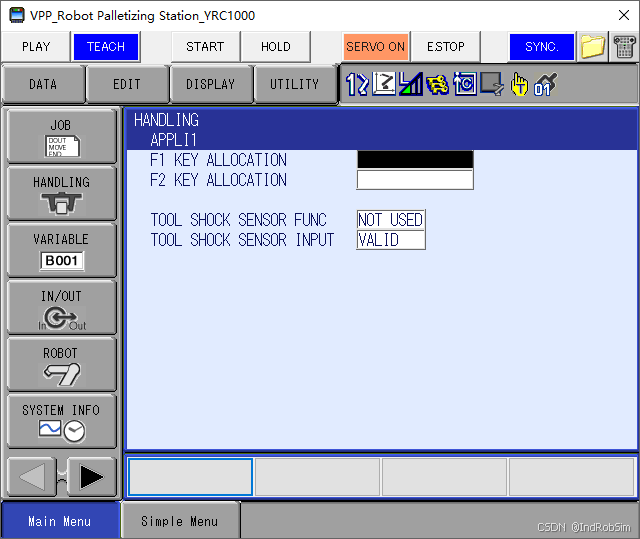
F1 KEY ALLOCATION:F1键定义,用于分配示教器操作面板上抓手电磁阀专用按键“f·1”的控制信号,本案例选择“HAND1-1”。
F1 KEY ALLOCATION:F2键定义,用于分配示教器操作面板上抓手电磁阀专用按键“f·2”的控制信号,本案例选择“HAND1-2”。
F1、F2键信号分配选项除了“HAND1~HAND4”以外,也可以选择“GP·OUT”,然后输入信号编号,即使用指定的通用输出信号来控制抓手电磁阀的开闭。
注:“f·1”可设定的抓手电磁阀信号仅限于I/O分配表里各电磁阀“-1”侧的抓手信号,“f·2”只能设定“-2”侧的抓手电磁阀信号。
TOOL SHOCK SENSOR FUNC:抓手碰撞传感器功能,用于设置是否启用抓手碰撞传感器功能,按“SELECT”键可以切换此功能是“未使用(NOT USED)”还是“使用(USED)”。
TOOL SHOCK SENSOR INPUT:抓手碰撞传感器输入,当机器人发生碰撞时,在碰撞传感器的作用下机器人会处于“暂停”状态,此时可以将此选项切换为“无效(INVALID)”来解除抓手碰撞传感器输入,以便能够手动移动机器人,当机器人移动到安全位置后,再将此选项切换为“有效(VALID)”,继续监视抓手的碰撞情况。
本案例为虚拟仿真,因此未启用抓手碰撞传感器。搬运诊断画面各参数全部配置完成后,如下图所示。
搬运专用按键
真实的安川机器人中,定义完F1和F2键后,在示教器上同时按“INTER LOCK”键与“f·1”键,就能够切换(HAND1-1)侧电磁阀的接通与断开,进而控制抓手工具的打开与关闭;同样的,按“INTER LOCK”键与“f·2”键,可以切换(HAND1-2)侧电磁阀的接通与断开。
另外,同时按“INTER LOCK”键与“TOOL1 ON/OFF”键,(HAND1-1)与(HAND1-2)信号输出的ON和OFF交替切换;同时按“INTER LOCK”键与“TOOL2 ON/OFF”键,(HAND2-1)与(HAND2-2)信号输出的ON和OFF交替切换。
在示教模式的程序内容画面中,单独按“TOOL1 ON/OFF”键或“TOOL2 ON/OFF”键,可以登录HAND指令。
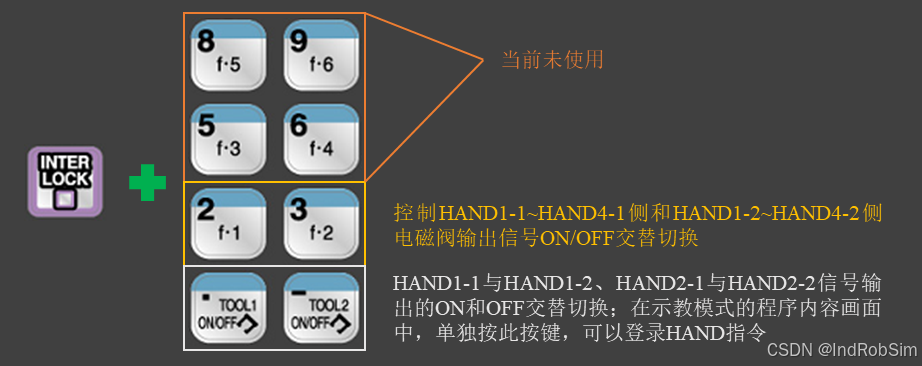
注:“TOOL1 ON/OFF”键与“TOOL2 ON/OFF”键默认已经配置完成,不定义F1和F2键也能够使用。
机器人搬运指令介绍
选择HANDLING应用后,安川机器人系统中会内置专门用于搬运的指令,包括抓手电磁阀控制指令、抓手打开与关闭状态检测指令。
HAND指令用于打开和关闭安装在机器人上的抓手工具,能够控制的执行单元包括单位电磁阀、双位电磁阀和3位电磁阀。1台机器人最多可以控制4个抓手。根据所选电磁阀的不同,电磁阀的信号控制逻辑有以下3种情况。
- SP(单位电磁阀)
使用HAND指令控制抓手电磁阀(x-1)侧接通/断开,反向信号输出至抓手电磁阀(x-2)侧。作为单电磁阀使用时,可以与任意一侧连接。
- 2P(双位电磁阀)
使用HAND指令控制抓手电磁阀(x-1)侧接通/断开,反向信号输出至抓手电磁阀(x-2)侧。
- 3P(3位电磁阀)
在HAND指令中添加ALL,可控制抓手电磁阀(x-1)侧和电磁阀(x-2)侧同时接通/断开。若不添加ALL,则指令的控制效果与双位电磁阀一样。
如下表所示,是HAND指令控制各类型电磁阀的接通/断开状态。
| 指令 (x:抓手号) | SP( 电磁阀x-1/x-2) | 2P (电磁阀x-1/x-2) | 3P (电磁阀x-1/x-2) |
| HAND x ON | ON/-(-/OFF) | ON/OFF | ON/OFF |
| HAND x OFF | OFF/-(-/OFF) | OFF/ON | OFF/ON |
| HAND x ON ALL | — | — | ON/ON |
| HAND x OFF ALL | — | — | OFF/OFF |
HAND指令语句格式,如下图所示。
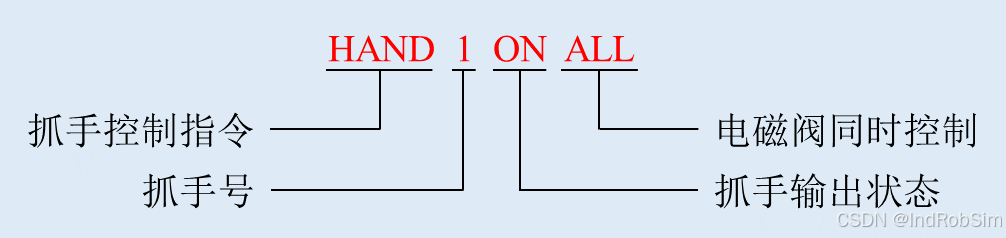
抓手号设定范围为1~4,且不能省略。
抓手输出状态可设定为ON或OFF,二者必选其一,且不能省略。
电磁阀同时控制为可选项,使用3位电磁阀时,控制电磁阀-1侧和-2侧同时ON或OFF时使用。
HSEN指令用于判断抓手传感器的输入是否为指定状态。当抓手状态是指定的输入状态时,在$B014中设定执行结果后,机器人会执行下一条指令程序。若指定了等待时间,则HSEN指令会等待指定的时间(包括无穷大时间)后再继续向下执行。
HSEN指令语句格式,如下图所示。
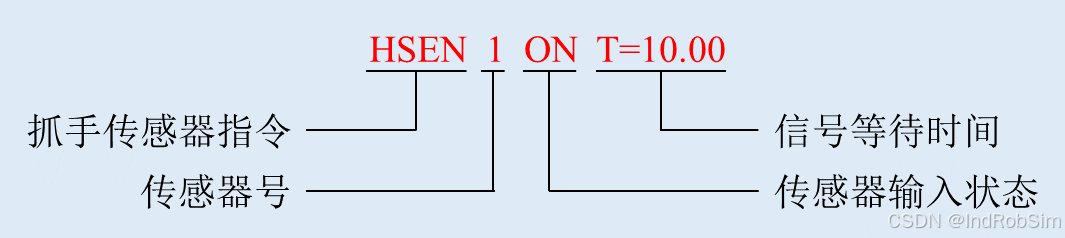
传感器号设定范围为1~8,且不能省略。
传感器输入状态可设定为ON或OFF,二者必选其一,且不能省略。
信号等待时间为可选项,时间设定范围为0.01~655.35s,另外也可以设定为FOREVER,即无限时间,省略时,等待时间为0s。
注:$B014是HSEN指令的执行结果变量。当指令在等待时间结束前(省略信号等待时间时)或未检测到设定的传感器输入状态时,$B014设定为0;当指令结束时,检测到了设定的传感器输入状态时,$B014设定为1。要想在机器人程序语句中获取$B014的变量值,可以使用GETS指令将此系统变量中的数值读取出来。
机器人示教编程
创建安川机器人搬运应用程序,本案例程序名称为HANDLING,并在其中示教机器人搬运程序,如下图所示。
在示教器操作面板上按“INFORM LIST”键,然后选择“DEVICE”,就可选择搬运相关的“HAND”指令与“HSEN”指令。
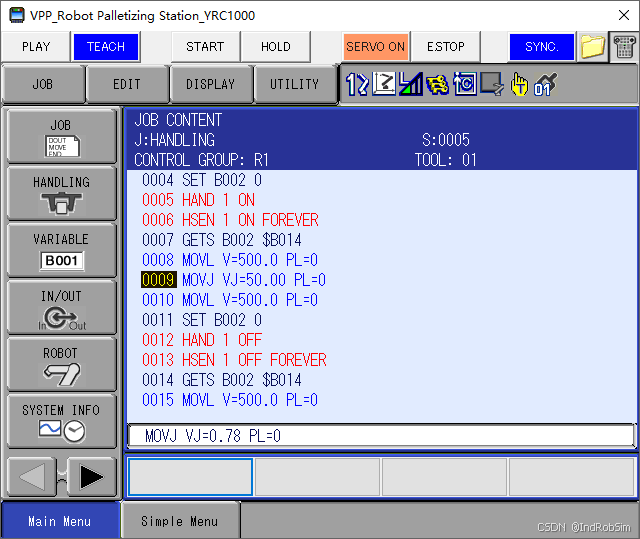
完整的安川机器人搬运程序代码如下所示。
NOP
MOVJ C00000 VJ=50.00 PL=0
MOVJ C00001 VJ=50.00 PL=0
MOVL C00002 V=500.0 PL=0
SET B002 0
HAND HNO: 1 ON
HSEN HSNO: 1 ON FOREVER
GETS B002 $B014
MOVL C00003 V=500.0 PL=0
MOVJ C00004 VJ=50.00 PL=0
MOVL C00005 V=500.0 PL=0
SET B002 0
HAND HNO: 1 OFF
HSEN HSNO: 1 OFF FOREVER
GETS B002 $B014
MOVL C00006 V=500.0 PL=0
MOVJ C00007 VJ=50.00 PL=0
END搬运机器人仿真运行
在MotoSimEG-VRC中仿真运行安川搬运机器人,仿真效果点击下方视频查看,可以看到机器人将工件从输送带搬运到了托盘上。
MotoSimEG-VRC虚拟仿真:基于HANDLING的安川机器人搬运应用
The End



















 3413
3413

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











