







目录
功能简介
PDPS软件不仅能够从外部导入JT格式的模型文件,还能够将创建好的机器人工作站/生产线导出为JT格式的模型文件。这个能够导出JT格式文件的功能就是“Export JT”命令。
使用“Export JT”命令可以将对象导出为JT格式文件,该格式与外部CAD应用程序兼容。
我们可以将整个Study或部分线体的3D几何图形导出为JT格式文件,用于以下所有目的:
可视化:为客户提供制造计划项目状态的3D图像。
布局:提供具有精确尺寸的静态工作站或线体资源的工厂布局。
设备设计:将仿真过程中发现的干涉点图像与穿透数据发送给机械设计人员,以进行调整优化。
图层信息:提供CAD图层ID、名称和说明以及标签。
对于视图窗口中显示的Study,我们可以指定要导出为JT格式文件的对象,如整个Study、复合对象或单个组件。
功能注意事项
导出为JT格式时,不同版本的PDPS软件,系统默认导出的JT格式文件的版本也有所不同。对于16.1版本的软件,系统默认情况下会导出为10.0版本的JT格式文件。
该功能只能导出可见(非空白)的,且已加载的对象。
不能对选定的多个对象运行“Export JT”命令。
导出JT格式文件操作
在Process Simulate软件中打开机器人虚拟仿真项目,然后在对象树(Object Tree)中选择要导出的Study、复合对象或单个组件。当然也可以不选择任何对象,这样导出的就是整个Study。
点击“File”菜单,然后依次选择“Import/Export”→“Export JT”![]() ,弹出Export JT对话框,如下图所示。
,弹出Export JT对话框,如下图所示。
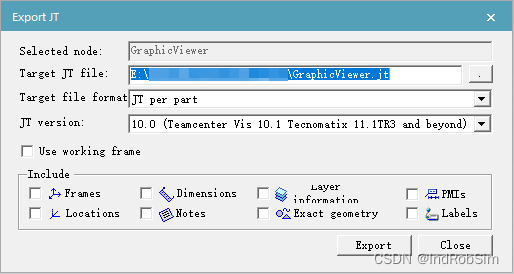
Selected node:选定的节点,显示已选定节点(对象)的名称。如果未选择任何对象,那么系统会将节点名称设置为GraphicViewer。如果选择了对象,则对象名称会自动显示在其后的显示框内。
Target JT file:目标JT文件,显示导出的JT格式文件保存的文件目录及其文件名称。若是需要修改保存的文件目录,可以点击后方的“浏览文件夹”![]() 按钮,来修改文件保存目录。默认情况下,系统会将导出文件目录设置为仿真项目的根目录,并将文件名称设定为与选定节点(Selected node)相同的文件名。
按钮,来修改文件保存目录。默认情况下,系统会将导出文件目录设置为仿真项目的根目录,并将文件名称设定为与选定节点(Selected node)相同的文件名。
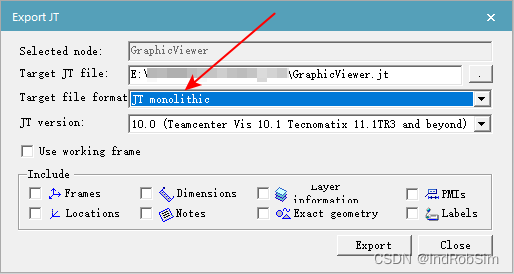
Target file format:目标文件格式,包含两个选项:JT per part、JT monolithic。其中,JT per part为默认选项,选择此选项后系统会将选定的节点按照层次结构依次导出为单个的JT格式文件;选定JT monolithic选项后系统会将整个节点及其子层次结构导出为1个独立的JT格式文件。
JT version:JT格式文件版本,设定要导出的JT格式文件版本。
Use working frame:使用工作坐标系。如果导出的节点是组件,那么导出时不带方向。导出Study或复合对象时,默认情况下,导出的组件具有相对于原点的方向。如果点选了“Use working frame”选项,那么组件将相对于工作坐标系导出。
Include:包含信息,选择要包含在JT格式文件内的信息,包括坐标系(Frames)、点位(Locations)、尺寸标注(Dimensions)、注释(Notes)、图层信息(Layer Information)、精确几何图形(Exact geometry)、产品制造信息(PMIs)、标签(Labels)。
按照需求设置相应的导出参数,本例只将Target file format设置为“JT monolithic”,点击“Export”按钮。
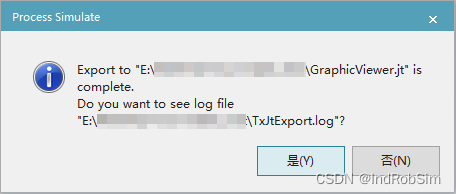
等待一段时间后弹出“是否查看日志文件”的信息提示框,如下图所示,点击“否”按钮,JT格式文件导出完成。
导出JT格式文件查看
进入Target JT file设定的文件目录,可以看到文件夹内多了2个文件,1个是导出的JT格式文件,另1个是TXT格式的日志文件。
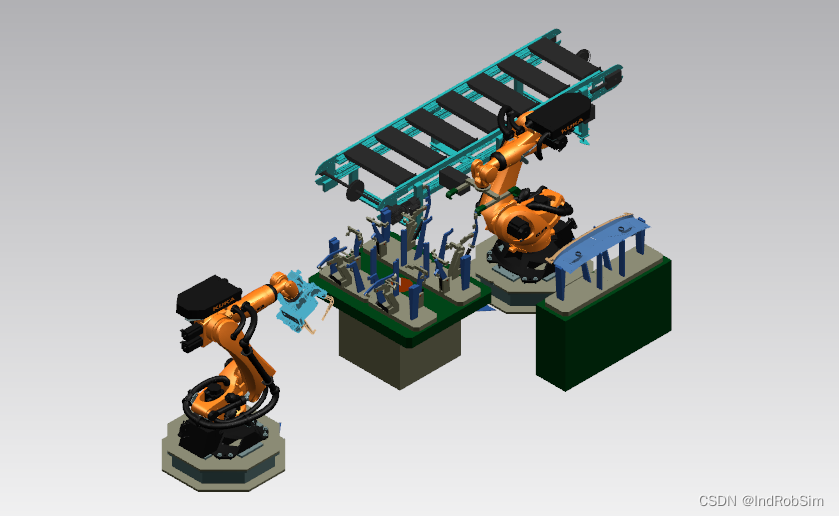
使用JT2Go或NX等软件打开导出的JT格式文件,就可以查看完整的机器人工作站3D图形了,如下图所示。
The End

















 1838
1838











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











