







目录
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
概述
抓手是机器人应用较多的一种工具,因此在使用PDPS软件对机器人进行虚拟仿真时同样会用到抓手工具。与点焊焊枪、工装夹具一样,通常情况下抓手工具也具有一定的运动机构。所以在仿真时,要先将抓手工具的运动机构制作出来,然后再将其安装到机器人上进行使用。
抓手工具模型导入
机器人的抓手工具可以使用离线版的PS软件来制作,一般情况下安装完PDPS软件后都会在桌面上生成若干个快捷图标,其中“PS on eMS Standalone” 就是PDPS 15.1.2版本软件的离线PS快捷图标。不同版本的离线版PS软件图标会有所不同,但是功能都是一样的。
就是PDPS 15.1.2版本软件的离线PS快捷图标。不同版本的离线版PS软件图标会有所不同,但是功能都是一样的。
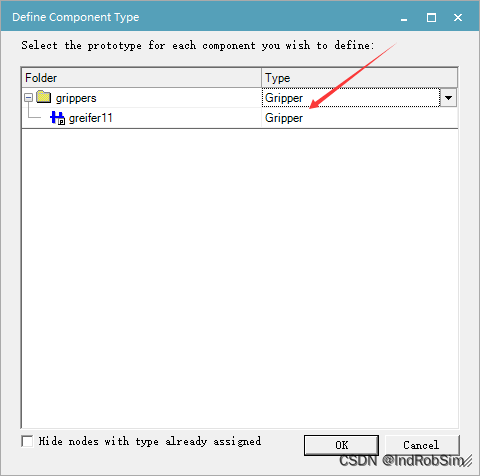
在PS on eMS Standalone中创建一个“New Study”,然后在“Modeling”菜单栏下的Components命令组中点击“Define Component Type” 命令按钮,在弹出的对话框中浏览到抓手工具模型文件,并将其打开。在弹出的Define Component Type对话框中将抓手工具模型的类型定义为“Gripper”,即预定义为抓手。
命令按钮,在弹出的对话框中浏览到抓手工具模型文件,并将其打开。在弹出的Define Component Type对话框中将抓手工具模型的类型定义为“Gripper”,即预定义为抓手。
点击“OK”按钮后,弹出“部件类型定义成功”的信息提示框,点击“确定”按钮。
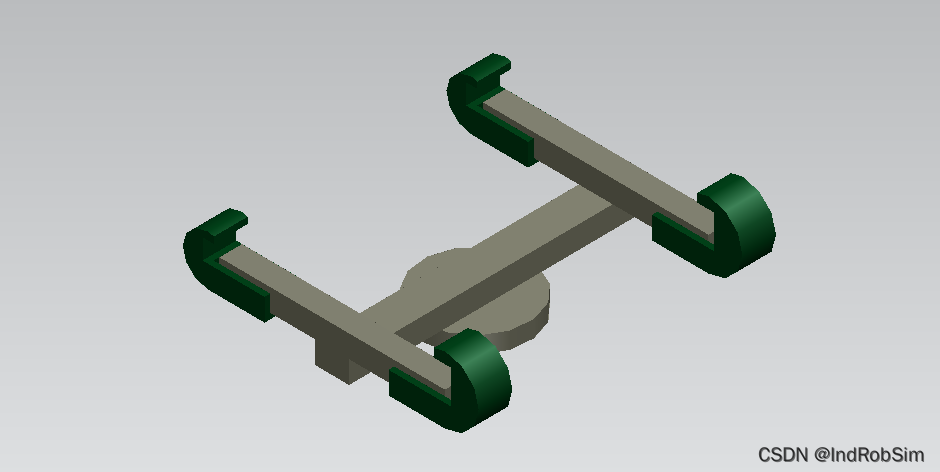
点击“Insert Component” 命令按钮,在弹出的对话框中浏览到抓手工具模型并将其打开,抓手工具模型就导入到PS软件中,同时在软件工作区内显示。
命令按钮,在弹出的对话框中浏览到抓手工具模型并将其打开,抓手工具模型就导入到PS软件中,同时在软件工作区内显示。
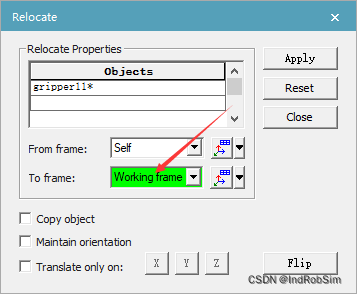
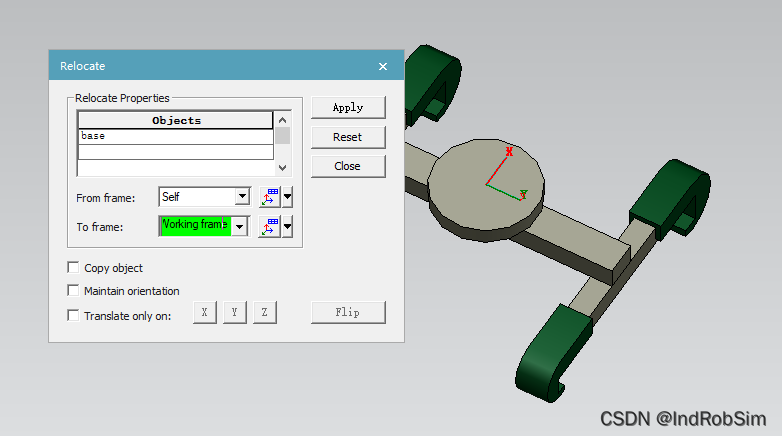
使用“Relocate”快捷命令将抓手工具模型移动到软件的工作坐标系(Working frame),以方便后续坐标系的创建。
抓手运动机构制作
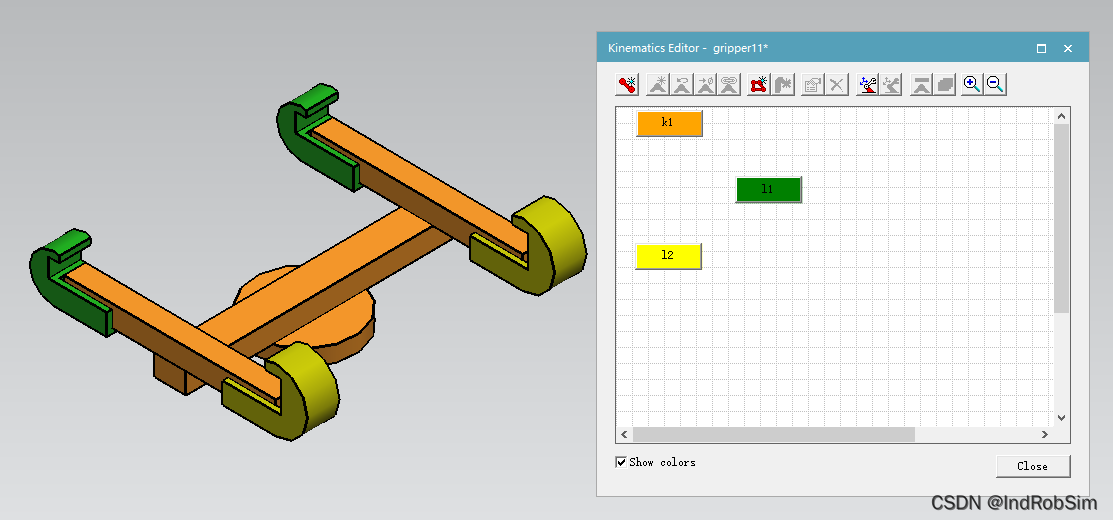
使用“Set Modeling Scope”命令将抓手工具模型切换为可编辑状态,然后点击“Kinematics Editor”命令按钮,打开运动学编辑器(Kinematics Editor)对话框,在编辑器中可以为抓手工具创建运动机构。
在Kinematics Editor对话框中点击“Create Link”命令按钮,为抓手工具创建链接,其中抓手的固定部分模型定义为k1,夹爪部分模型分别定义为l1、l2。
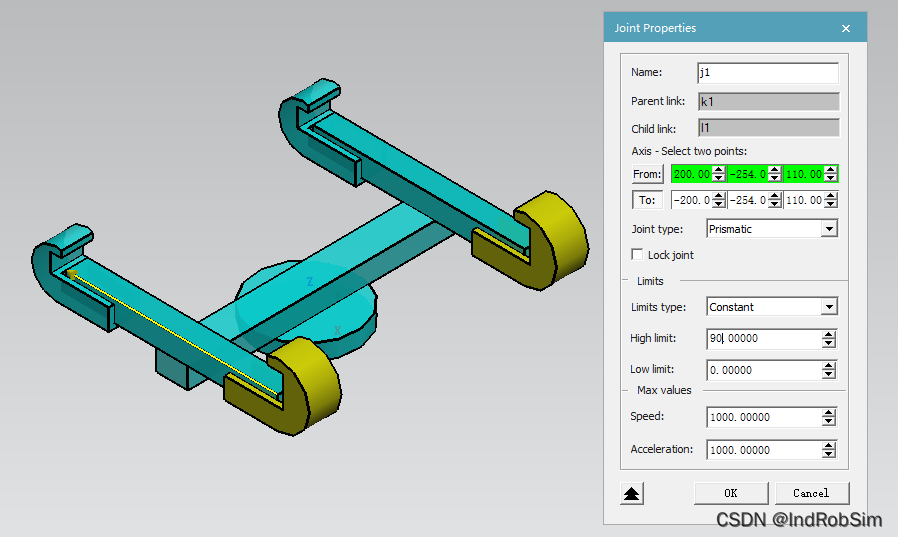
使用“Create Joint”命令,为抓手工具创建关节,即创建链接与链接之间的运动关系。首先为k1和l1创建关节j1,关节类型为直线(Prismatic),运动上限为90mm,运动下限为0mm。
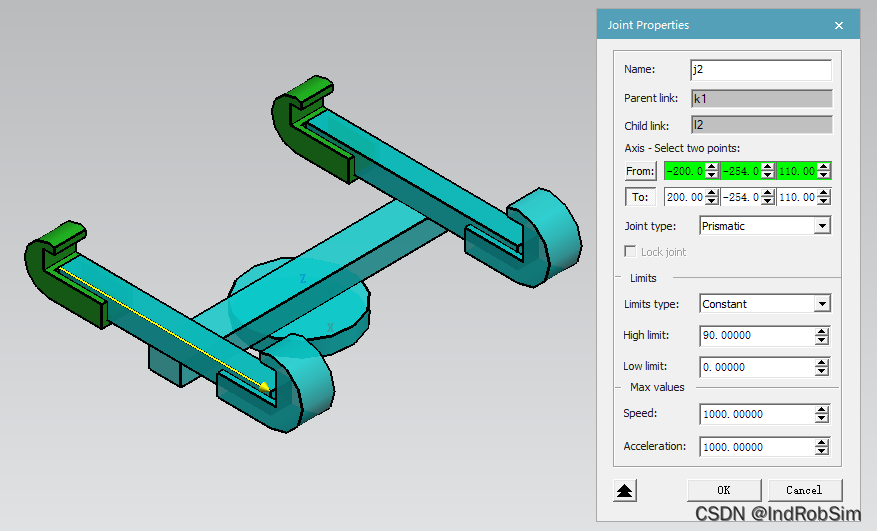
然后为k1和l2创建关节j2,关节类型、运动上下限与关节j1相同,只是运动方向与j2相反(图中抓手模型上的黄色箭头所示)。
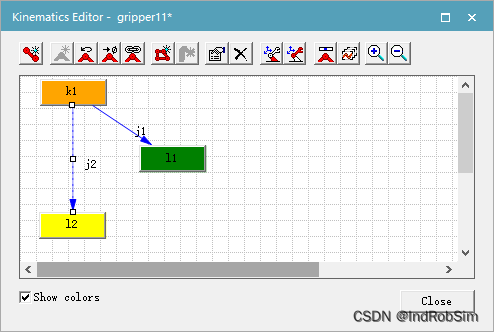
点选已经创建好的关节j2,然后点击“Joint Dependency”![]() 命令按钮,创建关节j2与j1之间的依赖关系。
命令按钮,创建关节j2与j1之间的依赖关系。

全部创建完成后,抓手工具模型运动学编辑器对话框中的内容如下图所示。
抓手运动状态设置
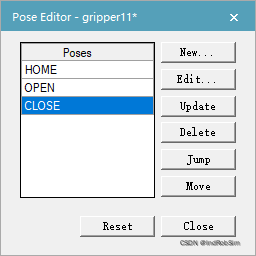
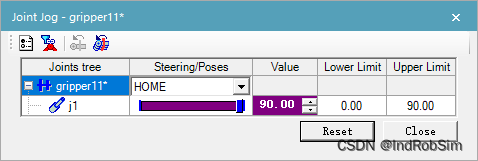
关闭Kinematics Editor对话框,然后使用“Pose Editor”命令,为抓手工具创建运动状态。其中,Open状态为抓手全部打开(90),CLOSE状态为抓手全部关闭(0),同时将HOME状态修改为抓手全部打开。
抓手工具Base坐标系与TCP坐标系创建
在Layout命令组中点击“Create Frame”命令按钮,任意创建一个坐标系,并将其名称修改为“Base”。然后使用“Relocate”快捷命令将Base坐标系移动到Working frame坐标系处。
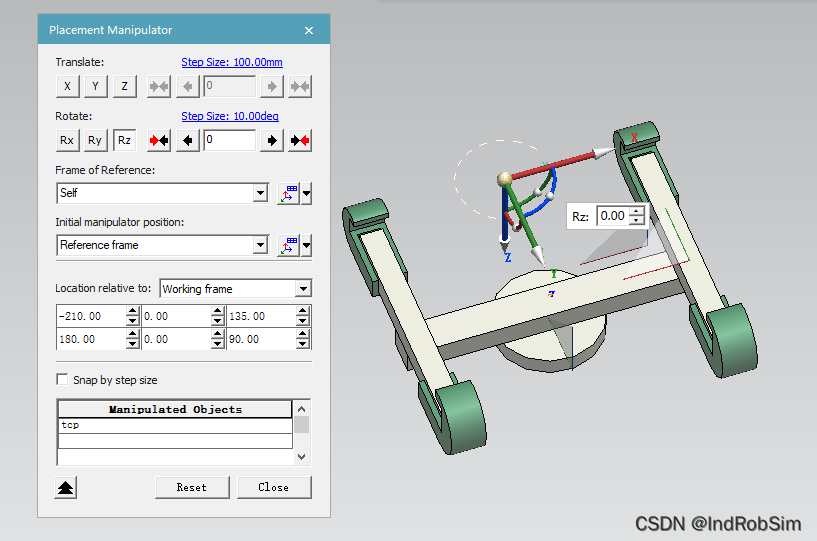
参考上述方法,创建tcp坐标系,然后使用“Placement Manipulator”快捷命令将tcp坐标系移动到抓手工具TCP所在位置处,本抓手工具相对于Working frame坐标系的TCP坐标值如下图所示。
抓手工具定义
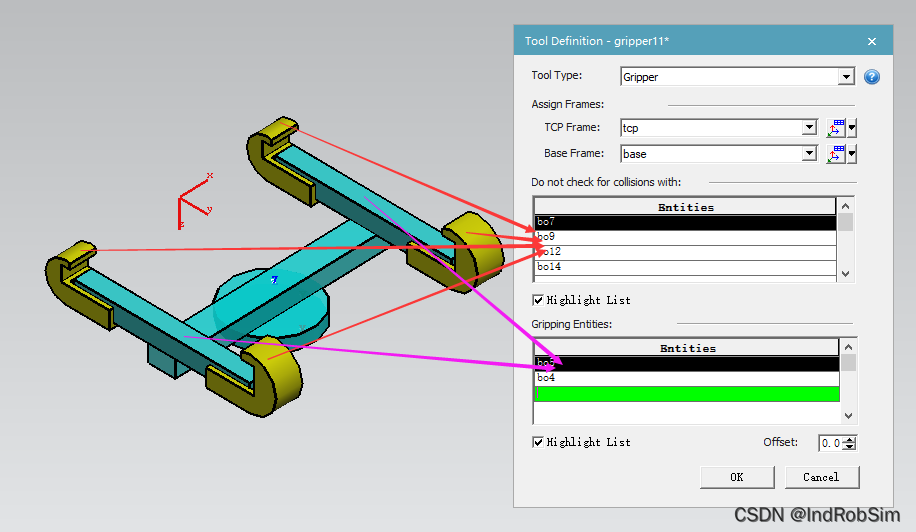
点击“Tool Definition”命令按钮,弹出Tool Definition对话框,在此对话框中可以进行抓手工具定义。
Tool Type:指定工具类型,选择“Gripper”即抓手工具。
TCP Frame:指定TCP坐标系,选择创建的“tcp”。
Base Frame:指定Base坐标系,选择创建的“Base”。
Do not check for collisions with:选择抓手工具上不检查干涉的零部件,本案例选择抓手的4个夹爪。
Gripping Entities:选择工具上与抓取工件接触的零部件,本案例选择抓手工具上夹爪所在的两根滑轨。
Offset:设定Gripping Entities与工件之间的偏移距离,本案例设定为0mm。
抓手工具保存与手动运行测试
点击“End Modeling”命令按钮,保存已创建完成的抓手工具模型。
左侧对象浏览树Object Tree中点选抓手工具,然后在“Home”菜单栏下的Tools命令组中点击“Joint Jog”命令按钮,弹出抓手工具手动操作对话框。在对话框中可以测试抓手工具夹爪的打开、关闭效果。
The End



















 1587
1587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











