







目录
概述
在使用ABB机器人前需要正确标定一些关键数据,其中就包含载荷数据。理论上讲,安装在机器人上的所有设备均需标定其载荷数据。如果没有标定或没有准确标定载荷数据,会导致机器人机械结构过载,这样不仅机器人无法发挥其最大能力,而且运动精度也会受到影响。
本篇内容只介绍机器人工具载荷与有效载荷的相关内容,其他载荷后期会陆续介绍。
对于焊接、切割、喷涂、机加工等类型的应用,要标定机器人工具自身的载荷数据;对于搬运、固定工具类型的应用,除了标定搬运工具的载荷数据外,还要标定工件的有效载荷数据。
载荷数据通常由质量、重心坐标和转动惯量组成,在ABB机器人上这些数据都支持手动输入,但是有些情况这些数据的获取与计算会比较困难。
为了方便用户标定载荷数据,ABB机器人系统内置了服务例行程序LoadIdentify。该例行程序能够自动识别安装在机器人上的工具载荷数据,以及搬运工件的有效载荷数据,并实现自动标定。
工具载荷自动标定前的准备工作
在ABB机器人上,运行LoadIdentify服务例行程序标定工具载荷之前,要先确保:
- 工具已正确安装。
- 在示教器手动操纵窗口中已选定工具。
- 机器人轴6接近水平(机械零点位置)。
- 要识别质量,还要先标定好安装在机器人上臂上的载荷(若有)。
- 机器人轴3、轴5和轴6不要过于接近其相应的关节运动极限。
- 机器人运行速度设置为100%。
- 系统处于手动低速运行模式。
进入载荷识别服务例行程序
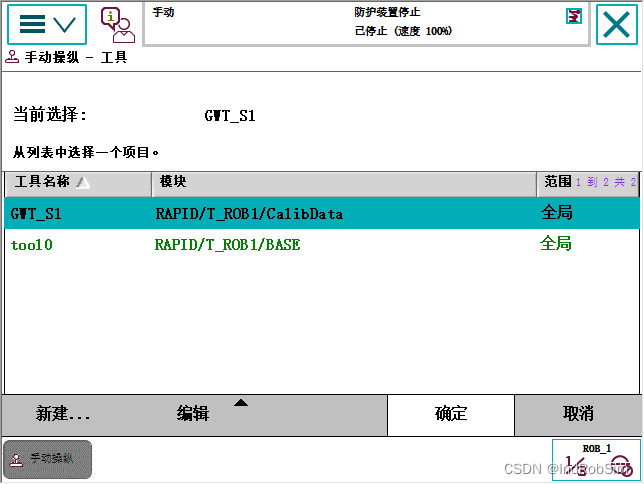
机器人示教器上依次点击“主菜单”→“手动操纵”→“工具坐标”,在工具界面中选择要标定载荷数据的工具,如下图所示,点击“确定”。
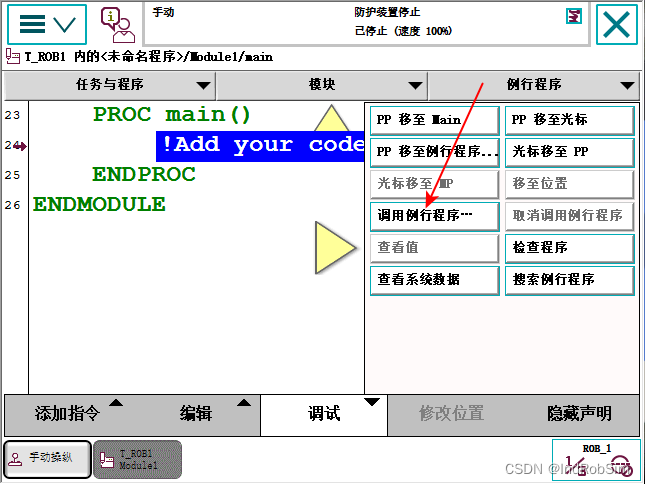
依次点击“主菜单”→“程序编辑器”,进入任意的例行程序。然后点击“调试”,在弹出的调试菜单中选择“PP移至Main”或“PP移至光标”或“PP移至例行程序”,此时调试菜单中的“调用例行程序”由不可用状态变为可用状态,如下图所示。
点击“调用例行程序”,在调用服务例行程序窗口中选择“LoadIdentify”,如下图所示,点击“转到”。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2648
2648

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











