







目录
机器人速度倍率介绍
在机器人手动或自动运行时都离不开速度设定,机器人的运行速度由多个要素共同决定,其中一个关键要素就是速度倍率,尤其是手动运行时,完全通过调节速度倍率来控制机器人的运行速度。
速度倍率是机器人手动或自动运行时,相对于最大运行速度的百分比(%)。
FANUC机器人当前的速度倍率,显示在示教器界面的右上角,如下图所示。
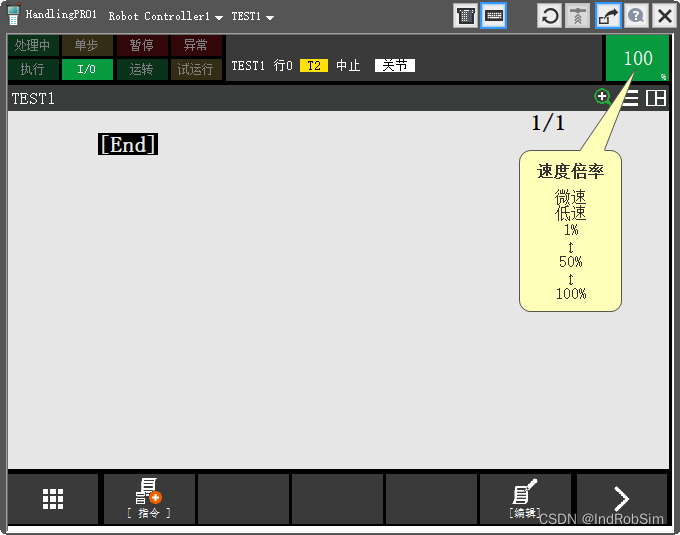
速度倍率100%,表示机器人在该设定下可以运动的最大速度。低速的步进量,手动直线运动的情况下,标准设定为每步0.1mm。手动关节运动的情况下,标准设定为每步大约移动0.001°。微速的步宽为低速步进量的十分之一。
机器人运行速度倍率切换操作
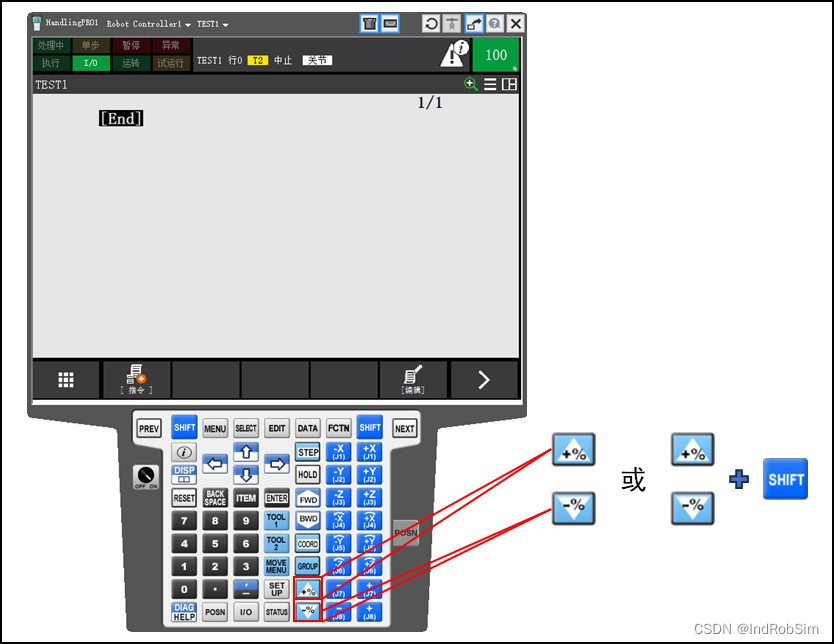
要改变速度倍率,可以直接按倍率键。也可以按住SHIFT键的同时按倍率键,这时速度倍率会按照微速、低速、5%、50%、100%这5档变化,这种操作可以称为快速快速切换速度倍率,与之对应的只按倍率键的操作可以称为非快速快速切换速度倍率。
倍率键及其在示教器上的位置,如下图所示。
速度倍率切换按键操作与对应的倍率值变化,及其说明如下表所示。
| 按键操作 | 倍率值变化 | 说明 |
| 倍率键 | 微速↔低速↔1%↔5%↔50%↔100% | 倍率在1%~5%之间每按一次倍率键增量为1%,倍率在5%~100%之间每按一次倍率键增量为5% |
| SHIFT+倍率键 | 微速↔低速↔5%↔50%↔100% | 默认的快速切换速度倍率值 |
可根据加工单元的状态、机器人动作种类以及对机器人的操作熟练程度来设定速度倍率。在掌握机器人操作之前,必须要在较低的速度倍率下进行操作。
注:使用“微速”、“低速”作为速度倍率时,机器人每次运动l步,再次手动运行机器人时,需要松开倍率键后再次按下该键。
快速切换速度倍率有效与无效设定
按下“SHIFT”键的同时再按“倍率”键能够快速切换速度倍率,但是这个功能只有在系统变量$SHFTOV_ENB的值为1时才有效,为0时则无效。设定为无效状态时,按下“SHIFT”键的同时再按“倍率”键,速度倍率值的变化与只按“倍率”键的速度倍率值变化情况相同。
一般情况下,FANUC机器人在出厂时快速切换速度倍率已设定为有效,有些机型也会设定为无效。如果需要更改设定,可以按照下述步骤操作。
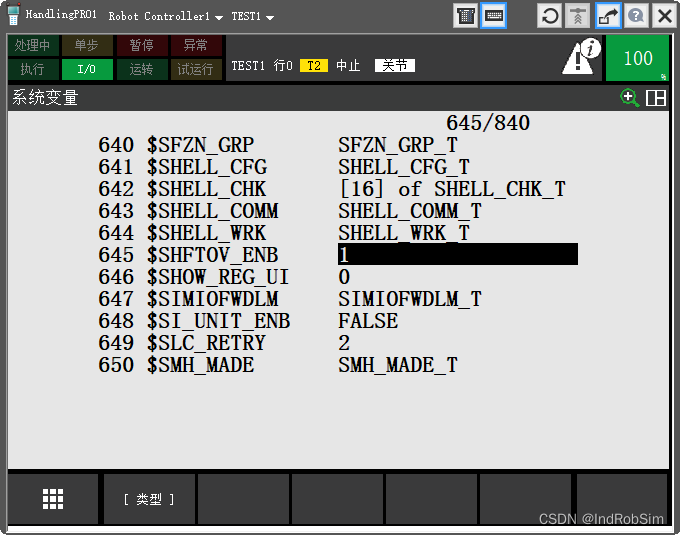
机器人示教器上依次按“MENU”键→“0”键,在MENU 2中依次选择“系统”→“变量”,按“ENTER”键,进入系统变量界面。
将光标移动到变量$SHFTOV_ENB,输入相应的变量值(1或0),按“ENTER”键即可,如下图所示。
速度倍率级数与增量自定义
FANUC机器人也支持速度倍率级数与增量自定义,值得注意的是非快速切换速度倍率与快速切换速度倍率的级数与增量是分别独立设定的。
要进行速度倍率级数与增量自定义时,可以在系统变量界面上,将光标移动到系统变量$OVRD_SETUP上,如下图所示。
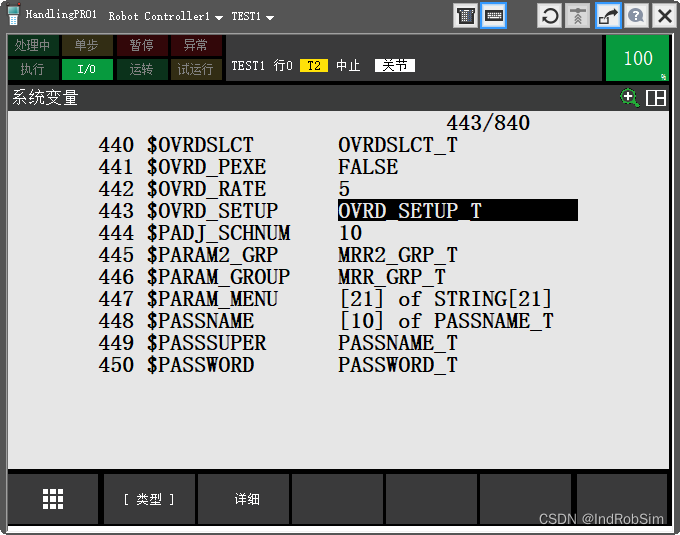
此时,按“F2 详细”键,进入系统变量$OVRD_SETUP的详情界面,如下图所示。
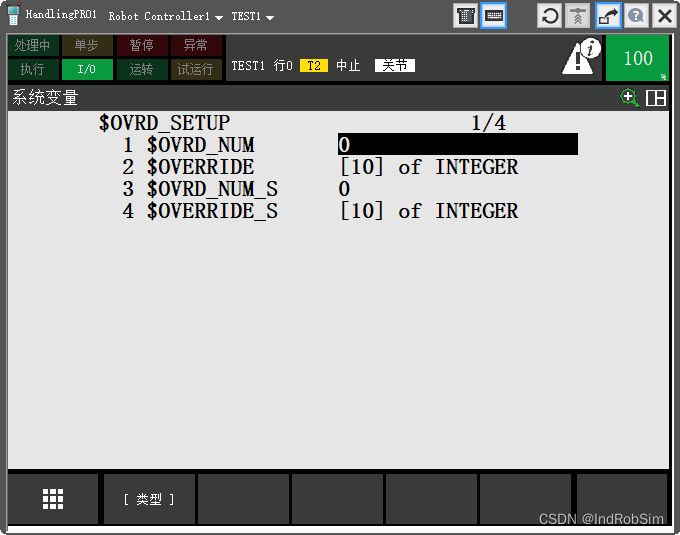
可以看到,系统变量$OVRD_SETUP包含4个变量,每个变量的详细说明如下。
$OVRD_NUM:用于设定非快速切换速度倍率的级数,在希望减少或者增加倍率级数时,可以更改此值,设定值有效范围为0~10。设定值为0时,表示本功能无效;只有设定值为1~10时,本功能才会生效(如设定为8时,本功能有效,倍率级数为8级)。标准情况下,此变量的设定值为0。
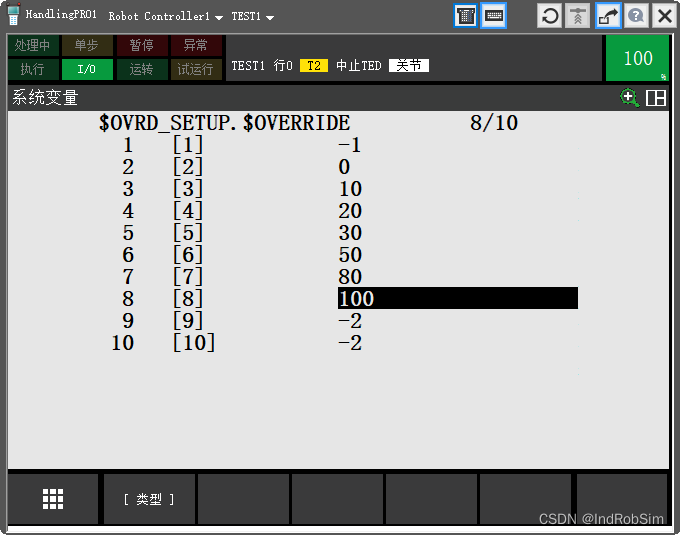
$OVERRIDE:将光标移动到此变量上,按“F2 详细”键,进入$OVRD_SETUP.$OVERRIDE界面,如下图所示。在此界面中,可以设定非快速切换速度倍率每一级的增量值。设定值有效范围为-2~100,-2表示尚未设定,-1表示微速,0表示低速。

注:在$OVRD_SETUP.$OVERRIDE界面中设定倍率增量值时,要按照从小到大的顺序依次设定,并且有效级数不能超过$OVRD_NUM的设定值。在设定不正确的状态下按下倍率键,速度倍率会始终为微速。
$OVRD_NUM_S:用于设定快速切换速度倍率的级数,设定值有效范围与操作方法同非快速切换速度倍率的级数。
$OVERRIDE_S:设定快速切换速度倍率每一级的增量值,设定值有效范围与操作方法同非快速切换速度倍率每一级的增量值。
速度倍率级数与增量自定义举例
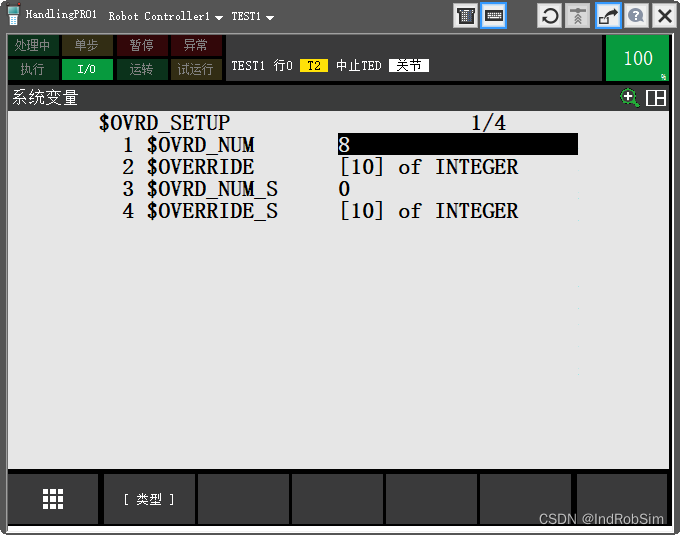
快速切换速度倍率的级数设定为8,对应的系统变量$OVRD_NUM的设定值为8,如下图所示。
速度倍率增量按照微速↔低速↔10%↔20%↔30%↔50%↔80%↔100%依次切换,对应的系统变量$OVERRIDE的设定值如下图所示,这种情况$OVERRIDE[9-10]未使用,因此设定值都是-2。
快速切换速度倍率级数与增量的自定义方法与之类似,可参考设定。
The End



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











