










背景
室内湿度单传感器Kalman滤波,同时带有故障或攻击检测功能。
代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <math.h>
typedef struct{
double A,H,p,Q,R,K;
}Kalman;
void KalmanInit(Kalman *k){
k->A=1;
k->H=1;
k->K=0;
k->p=0.01; //p初值可以随便取,但是不能为0(0的话最优滤波器了)
k->Q=0.00001; //q参数调滤波后的曲线平滑程度,q越小越平滑
k->R=0.1; //r参数调整滤波后的曲线与实测曲线的相近程度,越小越接近
//k->x=0;
return;
}
double KalmanFilter(Kalman *k,double x,double y){
k->p = k->A * k->p * k->A + k->Q;//p_pre(k+1)=A*p(k)*A+Q; P预测更新,直接覆盖,此时p为p_pre
x = k->A * x;//x_pre(k+1)=A*xkf_1(k);x预测更新,直接覆盖,此时x为x_pre
k->K = k->p * k->H / (k->H * k->p * k->H + k->R);//K更新,使用p_pre
x = x + k->K * (y - k->H * x);//xkf(k+1)=x_pre(k+1)+Kk_1*(z(k+1)-H1*x_pre(k+1));x量测更新,使用x_pre和y
k->p = (1 - k->K * k->H) * k->p;//p(k+1)=(I-K*H)*p_pre(k+1);p量测更新,使用p_pre
return x;
}
int main()
{
int k=0;
float hum=10;
float hum_pre=10;
Kalman kalman;
KalmanInit(&kalman);
while(k<30){
if(k==5){
hum_pre = hum_pre+10;
}
if(k==8){
hum_pre = hum_pre-10;
}
hum=KalmanFilter(&kalman,hum,hum_pre);
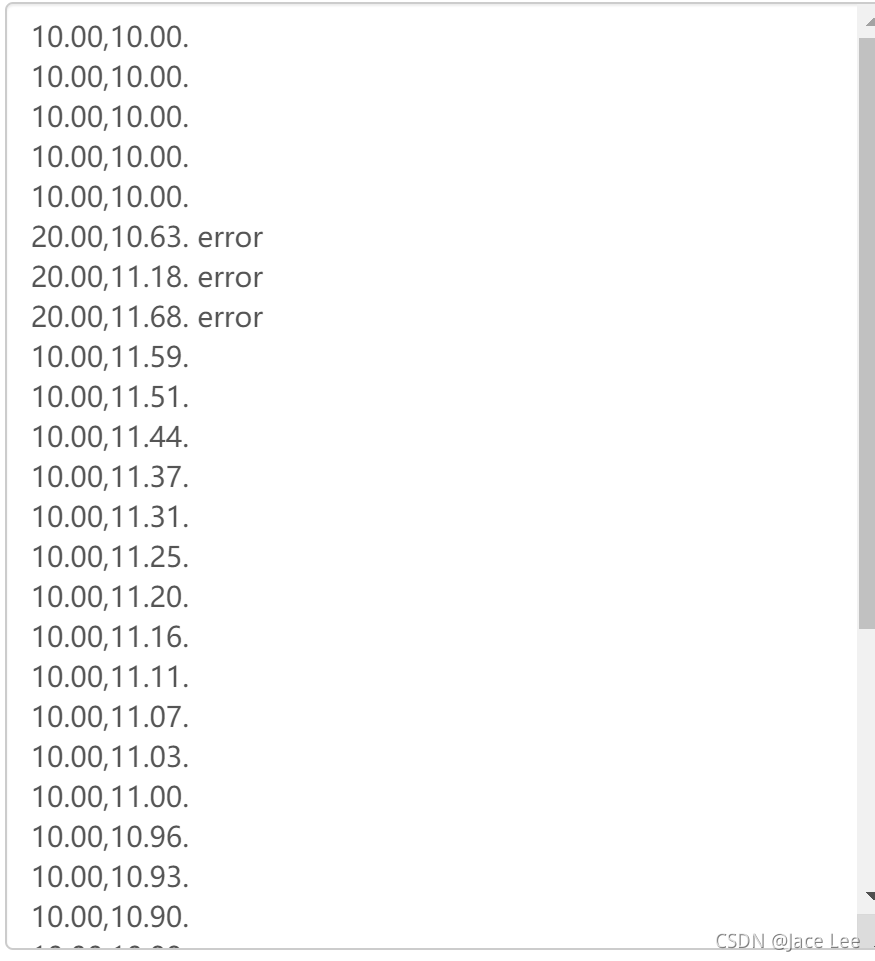
printf("%.2f,%.2f. ",hum_pre,hum);
if(hum_pre-hum>1){
printf("error");
}
printf("\n");
k++;
}
}
运行效果














 2761
2761











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









