









准备工作:
1、Ubuntu20.04,ros_neotic,实时内核
2、franka机械臂,realsense d435深度相机
3、标定码
控制franka机械臂时需要安装实时内核,否则在手眼标定过程中执行机械臂控制文件时容易 报错,点击实时内核安装,参考该链接,针对自己的版本进行安装。
标定码头位于aruco_ros/aruco_ros/etc文件夹下,一定要1:1下载,还可以自己下载需要的标 定码,网址如下:
内参标定码:Camera Calibration Pattern Generator – calib.io
一、配置环境
参考文章配置realsense d435相机环境,并进行验证,成功启动相机后可进行后续操作。
1、安装vision_visp
进入深度相机 src 目录下,也就是与realsense-ros同级别目录下,执行以下操作
cd ~/catkin_ws/src #进入文件夹
git clone -b neotic-devel https://github.com/lagadic/vision_visp.git编译时,耗时较长。可删除以下两功能包,用于追追踪,不影响标定。
2、安装aruco_ros
cd ~/catkin_ws/src
git clone -b neotic-devel https://github.com/pal-robotics/aruco_ros3、安装 easy_handeye
cd ~/catkin_ws/src
git clone https://github.com/IFL-CAMP/easy_handeye4、安装panda_moveit_config
cd ~/catkin_ws/src
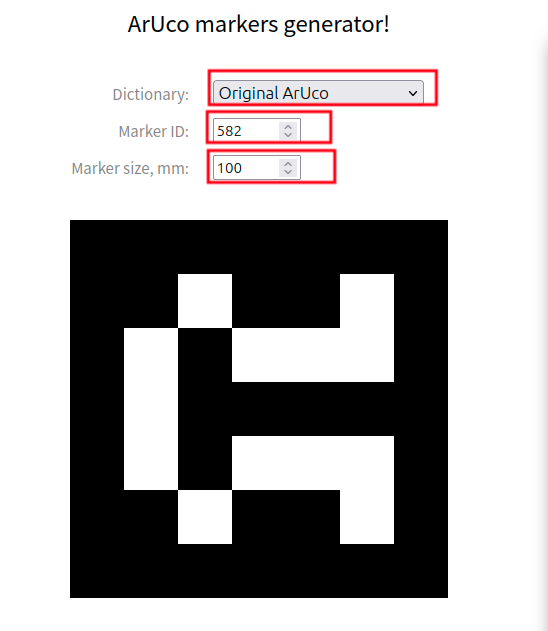
git clone https://github.com/ros-planning/panda_moveit_config.git -b neotic-devel5、为方便执行,将launch文件拆分,如下所示,本人使用如下图所示标定板
标定板自动生成网址:Online ArUco markers generator,生成标定码时,注意红框内的参数选择,选择Original ArUco,Marker ID和Marker size的参数后续launch文件会用到。
注意: tracking_base_frame就是相机的frame, tracking_marker_frame是标志物的frame, 这两者之间的关系由aruco_ros发布, 所以要对上; robot_base_frame就是机械臂底座, robot_effector_frame是末端, 这两个跟franka发布的要对上.
创建easy_panda.launch文件
<?xml version="1.0" ?>
<launch>
<arg name="namespace_prefix" default="panda_eob_calib" />
<include file="$(find easy_handeye)/launch/calibrate.launch">
<arg name="eye_on_hand" value="true"/>
<arg name="namespace_prefix" value="$(arg namespace_prefix)"/>
<arg name="move_group" value="panda_arm" />
<!--<arg name="move_group" value="panda_manipulator" doc="the name of move_group for the automatic robot motion with MoveIt!" /-->
<arg name="freehand_robot_movement" value="false"/>
<!-- fill in the following parameters according to your robot's published tf frames -->
<arg name="robot_base_frame" value="panda_link0"/>
<arg name="robot_effector_frame" value="panda_link8"/>
<!-- fill in the following parameters according to your tracking system's published tf frames -->
<arg name="tracking_base_frame" value="camera_link"/>
<arg name="tracking_marker_frame" value="aruco_marker_frame"/>
</include>
</launch>创建panda_realsense_eyeonbase.launch,内容如下
<?xml version="1.0" ?>
<launch>
<arg name="namespace_prefix" default="panda_eob_calib"/>
<!-- (start your robot's MoveIt! stack, e.g. include its moveit_planning_execution.launch) -->
<include file="$(find panda_moveit_config)/launch/franka_control.launch">
<arg name="robot_ip" value="172.16.0.2"/> <!-- set your robot ip -->
<arg name="load_gripper" value="false"/>
</include>
<!-- (start your tracking system's ROS driver) -->
<!-- <include file="$(find realsense2_camera)/launch/rs_camera.launch"> </include> -->
<!-- fill in the following parameters according to your tracking system -->
<arg name="markerId" default="582"/> <!-- set your marker id -->
<arg name="markerSize" default="0.1"/> <!-- in m -->
<arg name="eye" default="left"/>
<arg name="marker_frame" default="aruco_marker_frame"/>
<arg name="ref_frame" default=""/> <!-- leave empty and the pose will be published wrt param parent_name -->
<arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX -->
<arg name="camera_frame" default="camera_link" />
<arg name="camera_image_topic" default="/camera/color/image_raw" />
<arg name="camera_info_topic" default="/camera/color/camera_info" />
<node pkg="aruco_ros" type="single" name="aruco_single">
<remap to="$(arg camera_info_topic)" from="/camera_info" />
<remap to="$(arg camera_image_topic)" from="/image" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="0.1"/>
<param name="marker_id" value="582"/>
<param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered -->
<param name="camera_frame" value="$(arg camera_frame)"/>
<param name="marker_frame" value="$(arg marker_frame)" />
<param name="corner_refinement" value="$(arg corner_refinement)" />
</node>
<!-- (start hand-eye-calibration) -->
<!-- <include file="$(find easy_handeye)/launch/calibrate.launch">
<arg name="eye_on_hand" value="true"/>
<arg name="namespace_prefix" value="$(arg namespace_prefix)"/>
<arg name="move_group" value="panda_arm" />
<arg name="move_group" value="panda_manipulator" doc="the name of move_group for the automatic robot motion with MoveIt!" /-->
<!-- <arg name="freehand_robot_movement" value="false"/>
fill in the following parameters according to your robot's published tf frames -->
<!-- <arg name="robot_base_frame" value="panda_link8"/>
<arg name="robot_effector_frame" value="panda_hand_tcp"/> -->
<!-- fill in the following parameters according to your tracking system's published tf frames -->
<!-- <arg name="tracking_base_frame" value="camera_link"/>
<arg name="tracking_marker_frame" value="aruco_marker_frame"/>
</include> -->
<!-- (publish tf after the calibration) -->
<!-- roslaunch easy_handeye publish.launch eye_on_hand:=false namespace_prefix:=$(arg namespace_prefix) -->
</launch>
<arg name="robot_ip" value="172.16.0.2"/>,ip要与机械臂实际ip相同。
对panda_realsense_eyeonbase.launch文件进行修改如下,分别对应的ID号和标签尺寸,这是根据选择并打印出来的标签实际决定的:
图中有一处错误,相机的编号与尺寸,应该是标定码的尺寸与编号

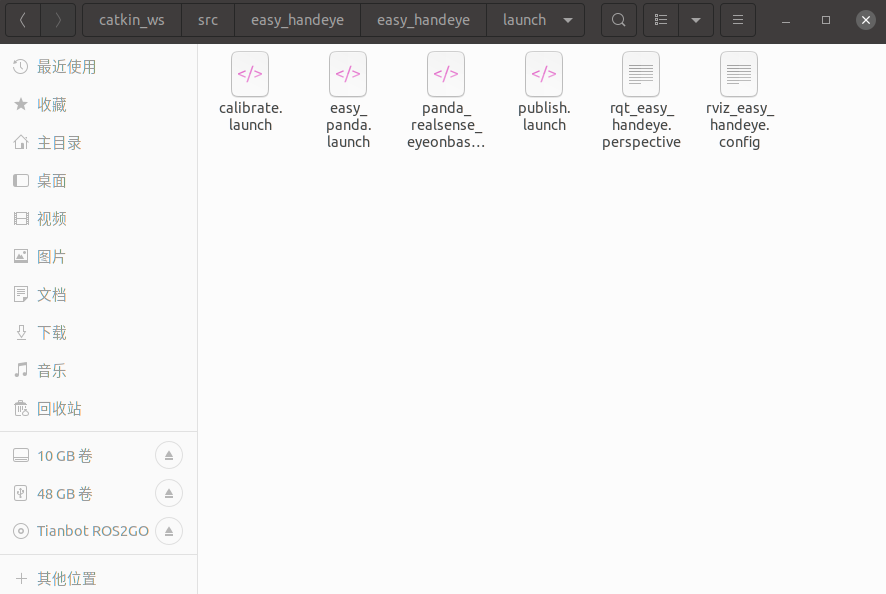
创建两个.launch文件,并修改好参数后将其启移动至如下图所示文件夹内
二、编译
执行以下命令进行编译
cd ~/catkin_ws
catkin_make如果是新安装系统,执行编译会报很多错误,大多是因为缺少某些包,根据自己系统版本,逐个下载即可。
下面列出某些错误
1、Resource not found: franka_control
Resource not found: franka_control
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/znc/catkin_ws/src
ROS path [2]=/opt/ros/melodic/share
The traceback for the exception was written to the log file
#解决方案:
sudo apt-get install ros-neotic-franka-control 2、cannot launch node of type [moveit_ros_move_group/move_group]: moveit_ros_move_group
ERROR: cannot launch node of type [moveit_ros_move_group/move_group]: moveit_ros_move_group
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/znc/catkin_ws/src
ROS path [2]=/opt/ros/melodic/share
# 解决方案
sudo apt-get install ros-neotic-moveit3、Could not find a package configuration file provided by "Franka"
Could not find a package configuration file provided by "Franka" (requested
version 0.8.0) with any of the following names:
FrankaConfig.cmake
franka-config.cmake
# 解决方案
sudo apt-get install ros-noetic-franka-gripper4、Could not find a package configuration file provided by "VISP"
Could not find a package configuration file provided by "VISP" with any of
the following names:
VISPConfig.cmake
visp-config.cmake
# 解决方案
sudo apt-get install ros-neotic-visp针对编译过程中的报错,逐个解决,错误多是缺少相关依赖,逐个安装即可。
三、执行标定
准备工作:
1、将相机固定于机械臂末端,通过数据线与电脑相连
2、用网线将机械臂与电脑相连,修改好电脑与机械臂ip,确保二者能够通信
1、执行相机节点
cd ~/catkin_ws$ source devel/setup.bash
roslaunch realsense2_camera rs_camera.launch

结果如图,相机节点启动成功
2、启动机械臂
将机械臂通电之后,机械臂底座显示黄色灯光,如下图所示,进入网页,解锁机械臂,网址输入:172.16.0.2,点击下图红框内按钮,解锁机械臂。

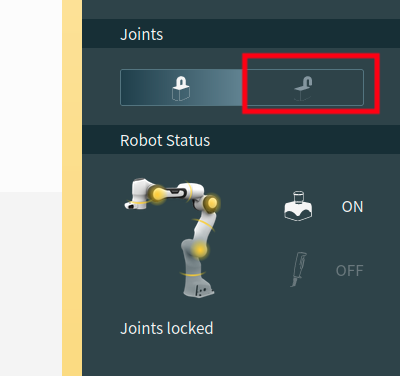
解锁成功后,机械臂底座显示蓝色灯光,只有在蓝色状态下才能执行程序,切记切记

执行机械臂控制的launch文件
cd catkin_ws
source devel/setup.bash
roslaunch easy_handeye panda_realsense_eyeonbase.launch 
执行报错,如下图所示,需要在控制页面激活fci


启动成功如下图所示:
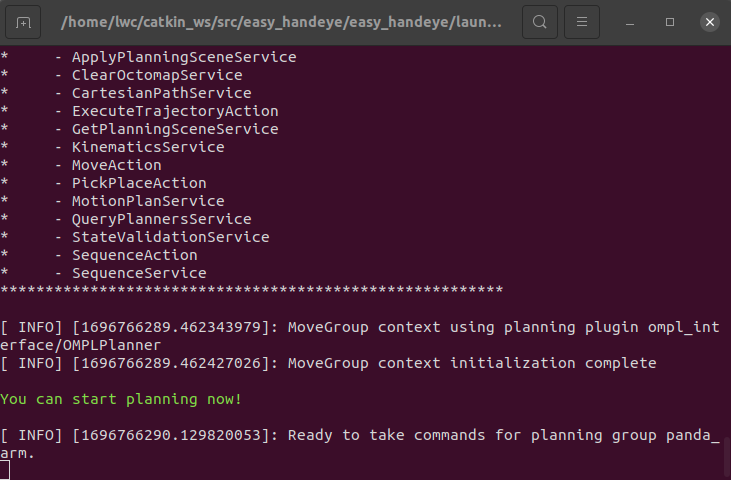
启动easy_panda.launch文件,执行成功后会出现以下三个窗口:

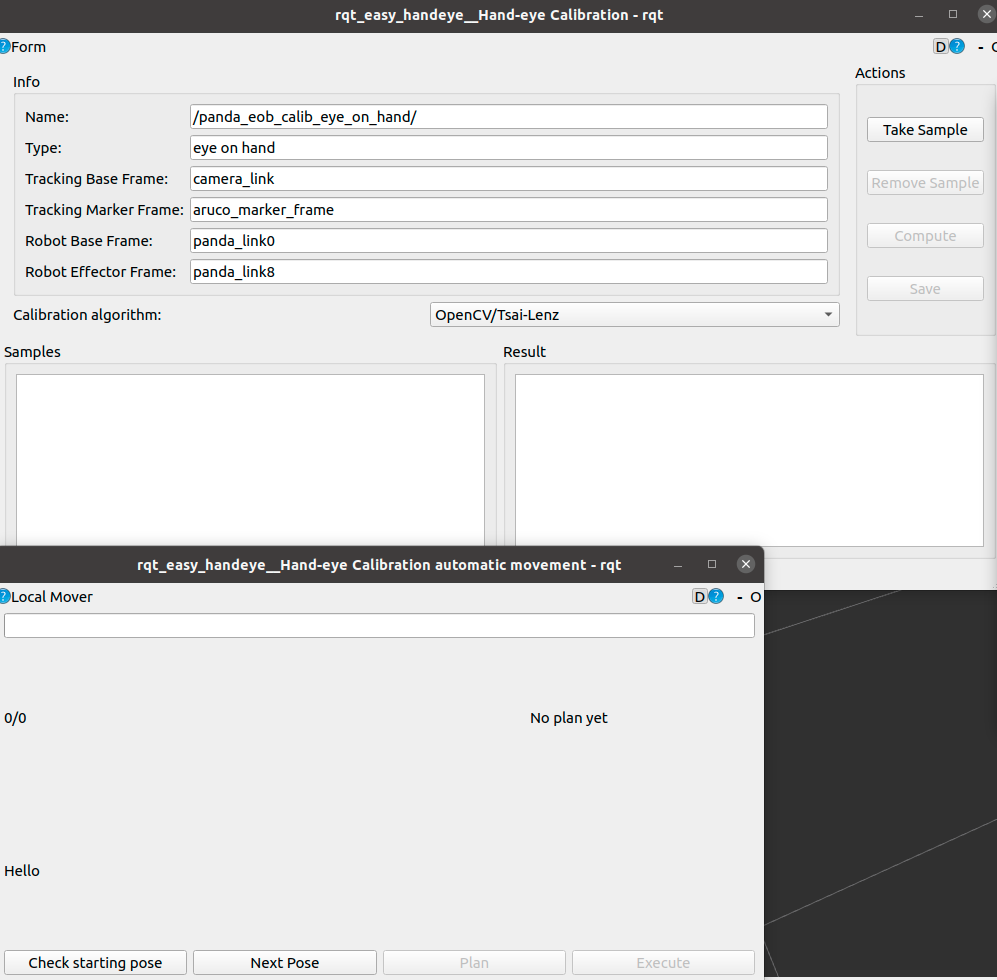
按以下操作步骤进行:
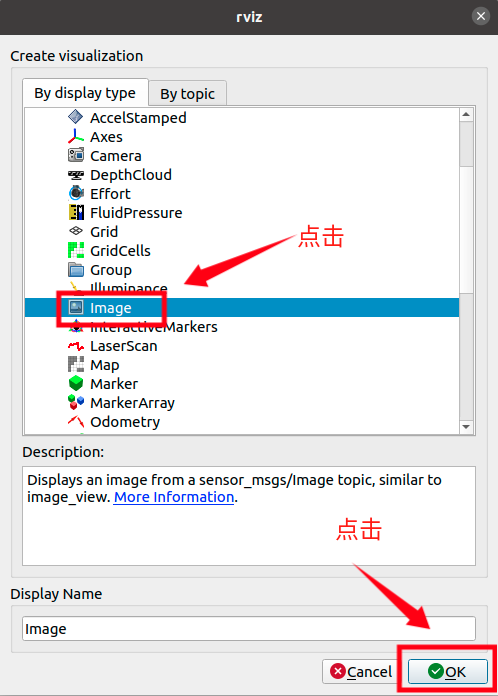
点击add
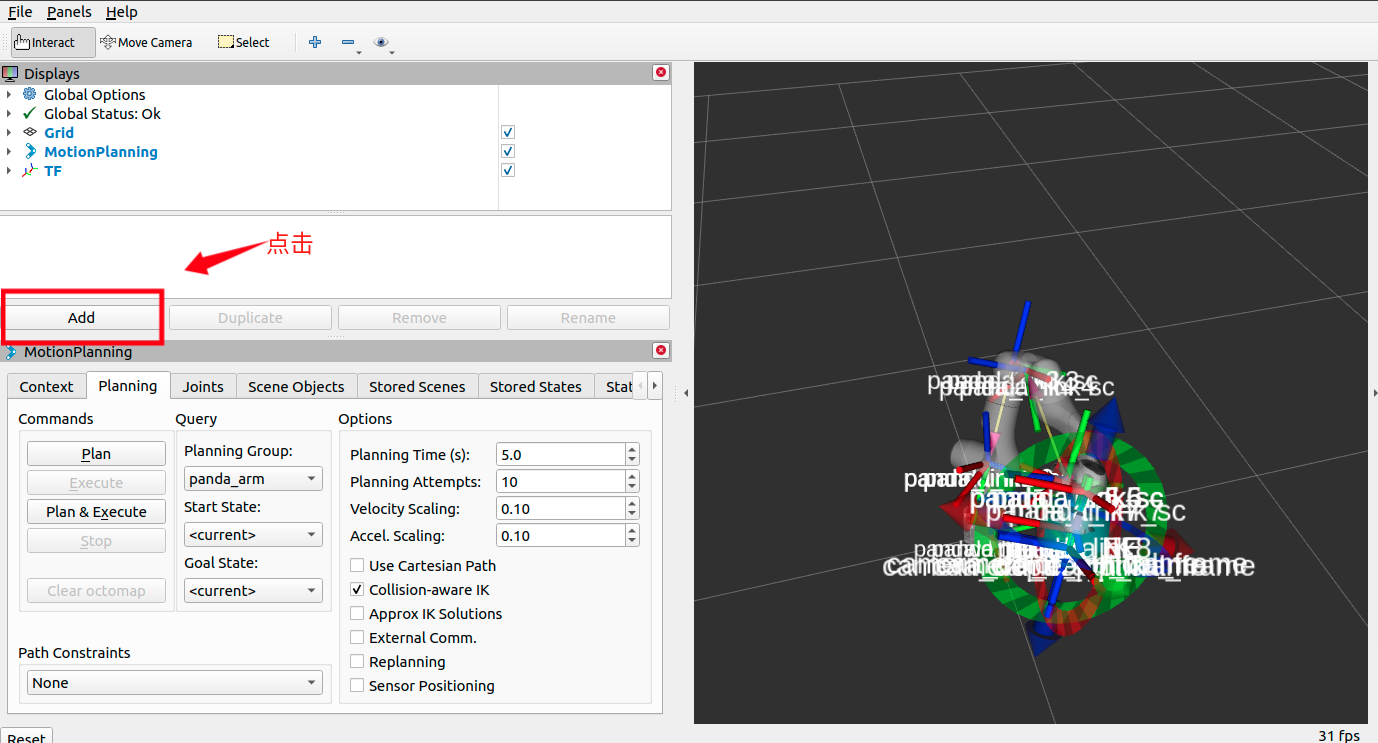
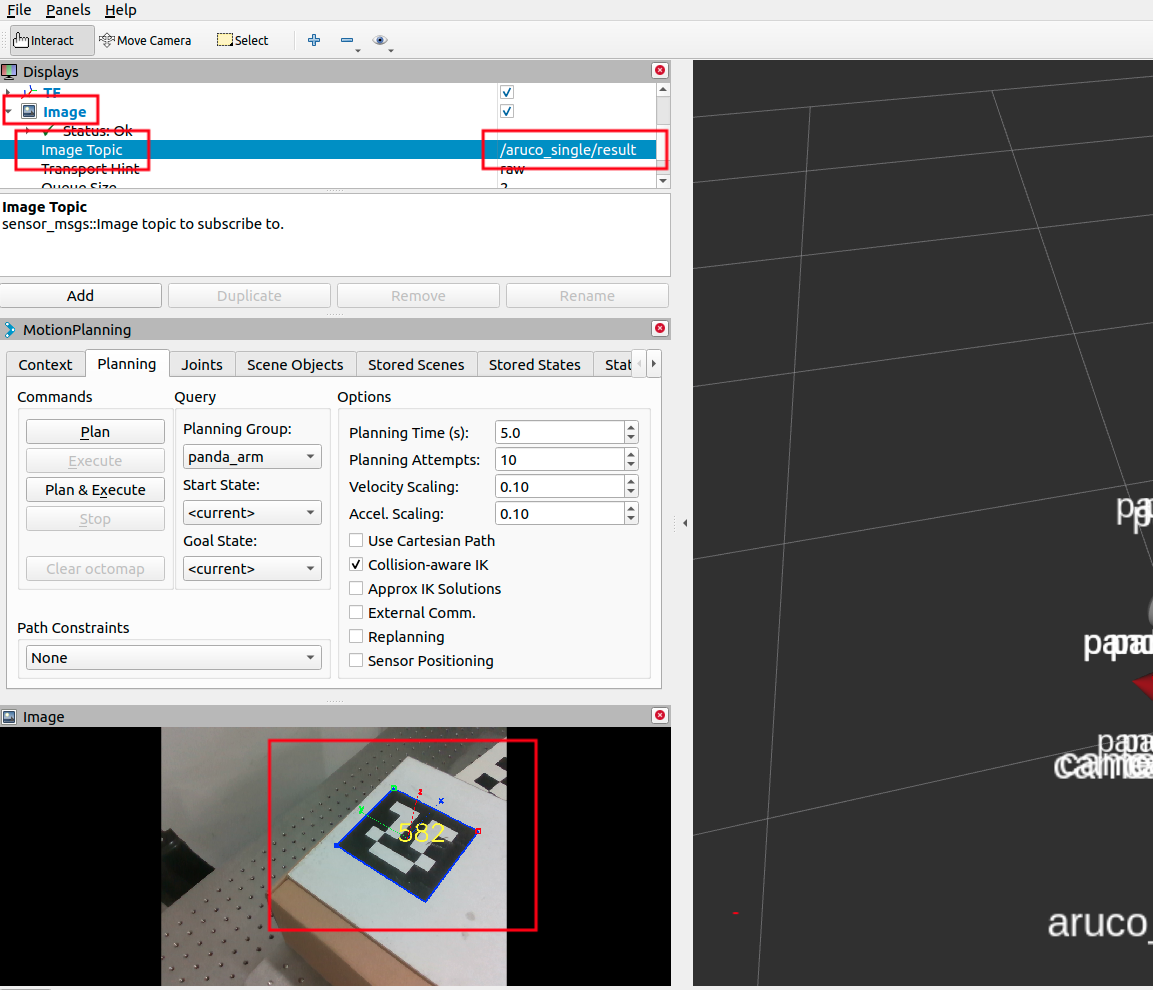
依次点击红框内内容,可观察相机已识别到标定码
同时,操作另外两个窗口
点击Check starting pose 弹出Ready to start:click on next pose即说明可以采样,随后点击Take Sample进行采样,之后点击Next Pose 再点击Plan,依次执行,采样十七次,点击Compute进行计算输出转换矩阵。
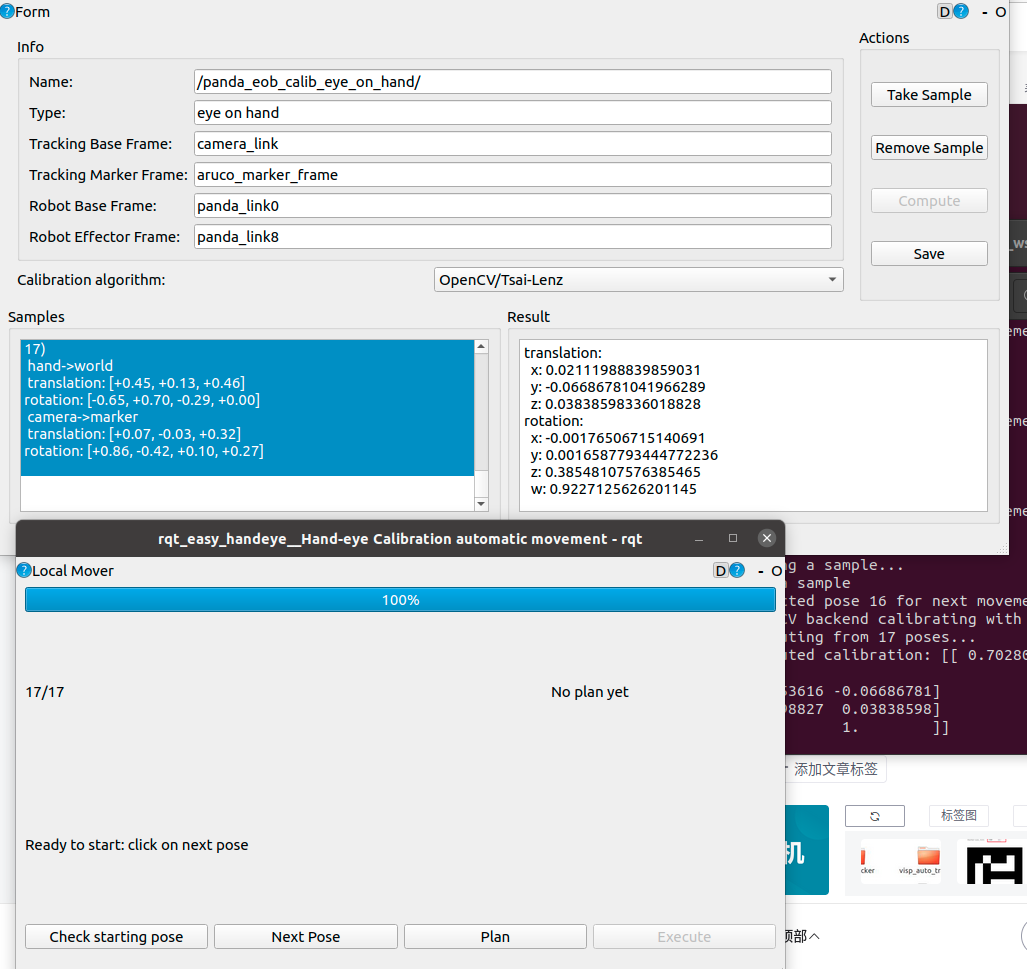

标定完成!















 1076
1076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









