










机器人课程教学终于进入第3年了,改进和优化的方案也进入第三版。课程教学经历着社会改变科技进步的巨大影响,由传统板书教学为主,到多媒体教学为主,再到如今的线下和线上教育教学的全面融合。不仅要在课堂上给学生讲授全面的知识点和常用方法,还要在网络上补充丰富的相关内容。现实世界和数字网络不仅给于每个人不同ID与角色,也赋予一门课程全新的呈现方式。从新零售、新制造、新金融、新技术、新能源到新工科、新教育,上好一门课,挑战越来越大,机遇前所未有,例如采用VR技术可以实现全沉浸式的机器人学习体验。还有一点,降低学习门槛,使课程通俗易懂非常重要。
- 第一版(链接),浮于表面,将课件新做,加入和16年机器人和控制学科最新的成果演示,将数理基础和实际应用进行结合讲解。
- 第二版(链接),17年改变了一些教学内容,让学生能在课堂上参与到课程中,学生参与算法演示,然后进行补充讲解。
- 第三版,目标是让学生能够更多的参与到课程学习中,由课程的被动参与着(知识学习),到主动践行者(工程实践)转变(key1);并且注重提升课堂教育的趣味性,将一些知识点和理论游戏化,让学生在玩耍过程中,理解一些知识模块的重要性及其之间的关联性,启发学生进行探索和思考(key2);并对知识要点进行梯度化重构,努力让不同需求的学生都能学有所获(key3)。
- 围绕这三个核心目标,下面列举一下准备进行教学尝试的案例。
机器人运动学模型讲解(节选)
x.1 机器人如何感知环境
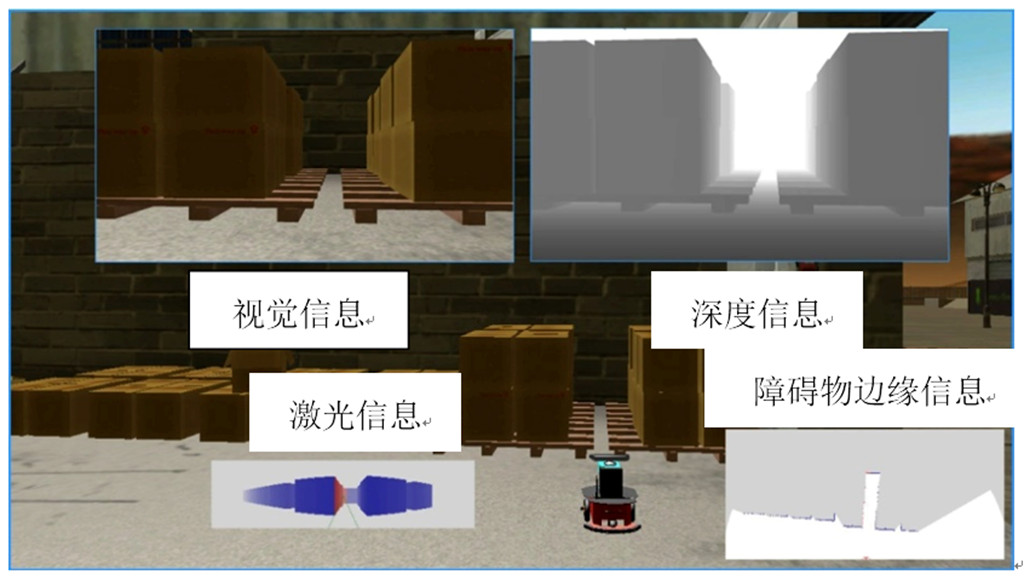
机器人通过丰富的传感器感知环境信息,如何确定自身在环境中的位置呢?如何计算从起点到终点所需要的速度和路径呢?在环境中标记出起点和终点,用游戏手柄遥控完成目标,分为可实现和不可实现多种目标。思考为什么?
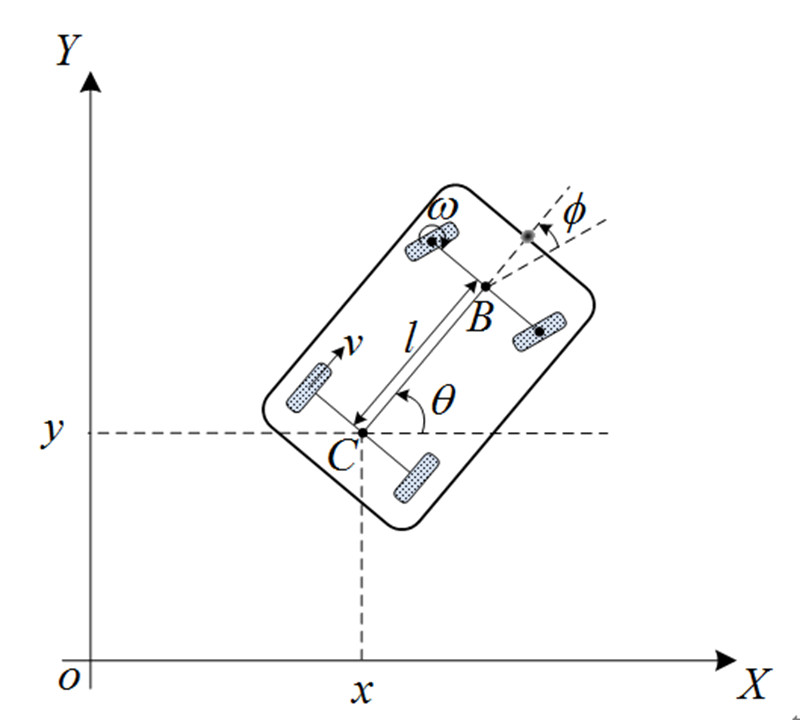
x.2 运动学模型
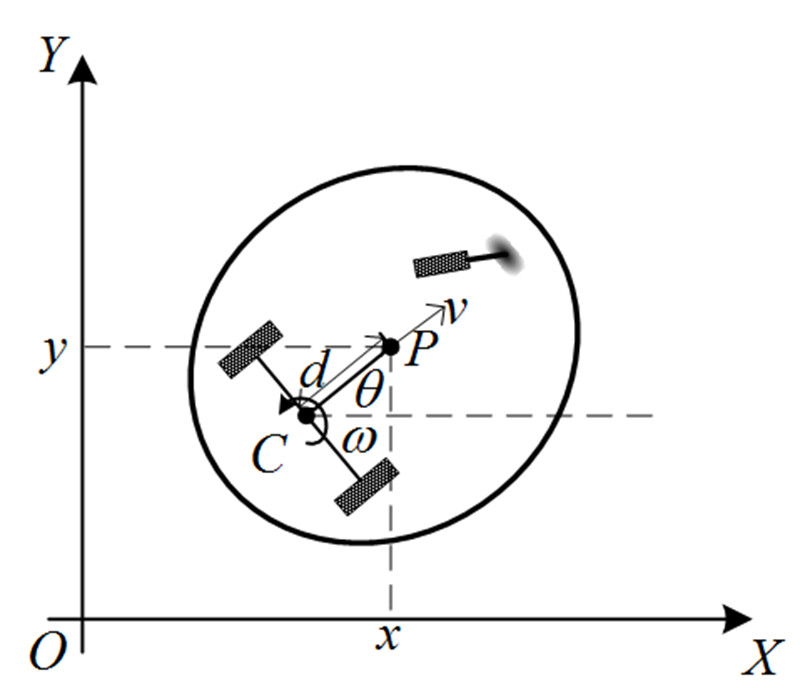
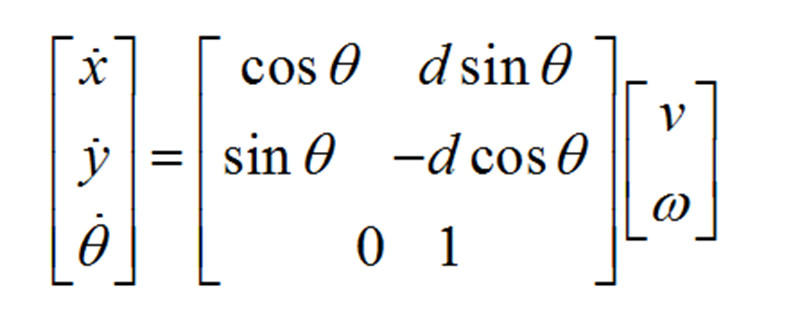
线速度和角速度与位姿改变之间的关联性。
x.3 知识点迁移能力
参考视频链接:1----2----3----(视频算法测试和上传时间为2015年)。
思考运动学模型在机器人控制中的重要性,延伸课外阅读,自动驾驶技术。
----
















 722
722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











