







自校正PID是自校正控制的一种,其核心思想是使用在线辨识来辨识系统参数的变化,之后使用极点配置的思想来计算PID参数,达到自动调节的目的。
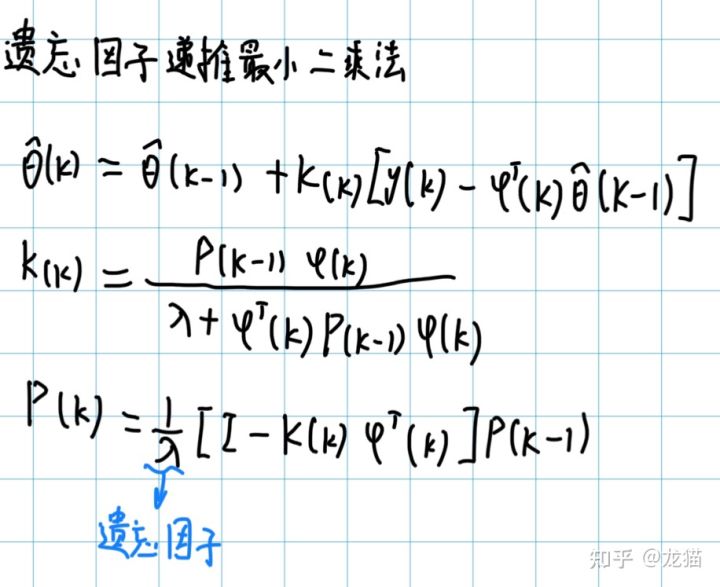
带遗忘因子的递推最小二乘法
在上一篇内容中,推导并实验了递推最小二乘法。但单纯的递推最小二乘法由于有以往数据的累积,因此当系统参数变化较快时,可能并不能很好的进行跟踪,因此可以增加一个遗忘因子,就可以更好的跟踪系统参数的变化:
计算PID
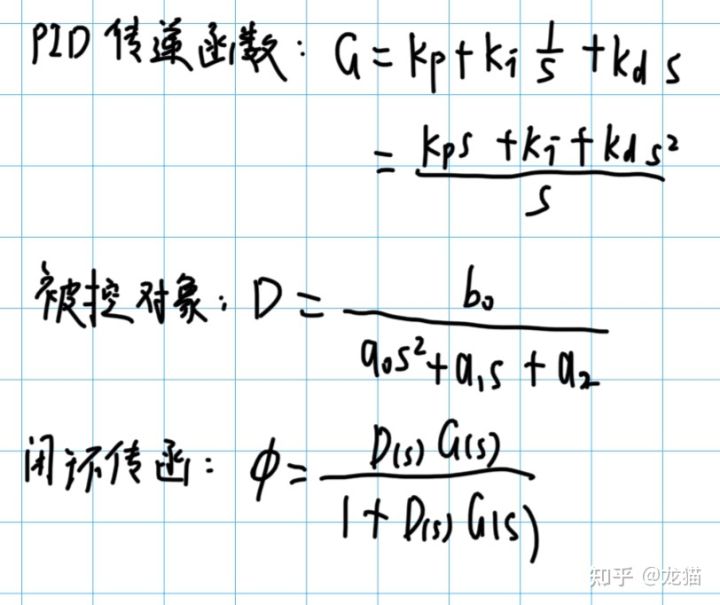
在参数辨识得出系统参数之后,就可以按照之前的极点配置的思想计算PID参数。按照之前的传递函数参考:G = b0 / (a0*s^2 + a1*s + a2)
对于此二阶系统,在加入了PID的传递函数后的闭环特征方程为三阶的,因此三阶的期望特征方程可以按照如下设置:
(s + alpha)(s^2 + 2*drag*wn + wn^2)
根据闭环传函,可以计算出特征多项式,之后根据上面的期望特征多项式,可以计算出PID参数。
实验
实验的程序分为了三组,一组是调试好的PID参数,但系统参数没有改变;第二组第五秒后,每周期改变一次系统参数,周期为0.001秒;第三组使用自校正PID,也是第五秒后,每周期改变一次系统参数。实验结果如下:

可以看出自校正PID有一定的效果,不过总体感觉优化效果并不大,不过也算是提供了一个思路,也有可能是PID参数的计算方法有待优化。


















 486
486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









