







2.2.4 模型预测控制算法
模型预测控制(Model Predictive Control,MPC)是一种先进的控制策略,通常应用于动态系统,以实现对系统状态的优化控制。实现模型预测控制算法的主要步骤如下所示。
(1)系统动力学建模:MPC算法的第一步是建立系统的数学模型,该模型描述了系统在不同控制输入下如何演变。这可以是线性或非线性、离散或连续的动力学方程。
(2)控制时序:算法在每个控制周期内执行,将当前系统状态作为初始条件。通过模型,MPC预测未来一系列可能的状态和控制输入。
(3)定义成本函数:MPC通过定义一个成本函数,该函数度量系统状态和控制输入之间的性能。成本函数通常包含两部分:状态误差的加权项和控制输入的消耗项。
(4)优化问题求解:MPC通过求解一个优化问题来选择当前控制周期内的最优控制输入。该优化问题的目标是最小化成本函数,同时满足系统动力学方程和任何附加的约束条件。
(5)实时实施:算法将优化问题的解作为当前时刻的控制输入应用于系统。系统执行这些控制输入,实际反馈的状态信息用于更新下一个控制周期的优化问题。
(6)迭代优化:随着时间推移,MPC迭代执行上述步骤,持续优化控制输入,以适应系统动态和外部扰动,实现对系统状态的稳健控制。
例如下面的实例实现了一个简单的模型预测控制算法示例,通过优化控制输入,使车辆在离散时间步内逐渐接近设定的目标位置。
实例2-4:使用模型预测控制算法控制车辆(源码路径:codes\2\locate\yu.py)
实例文件yu.py的具体实现代码如下所示。
# Vehicle dynamics model
def vehicle_dynamics(x, u):
dt = 0.1 # Time step
# State equation
x_next = x + dt * u
return x_next
# Cost function
def cost_function(u, x_desired, Q, R, x_current):
x_predicted = vehicle_dynamics(x_current, u)
cost = np.dot((x_predicted - x_desired).T, np.dot(Q, (x_predicted - x_desired))) + R * u**2
return cost
# Model Predictive Control algorithm
def model_predictive_control(x_current, x_desired, Q, R, control_bounds):
constraints = [{'type': 'ineq', 'fun': lambda u: control_bounds[0] - u},
{'type': 'ineq', 'fun': lambda u: u - control_bounds[1]}]
u_guess = np.zeros(1)
result = minimize(lambda u: cost_function(u, x_desired, Q, R, x_current),
u_guess, constraints=constraints)
u_optimal = result.x[0]
return u_optimal
# Main loop
def main():
x_initial = 0.0
Q = 1.0
R = 0.1
control_bounds = [-1.0, 1.0]
num_steps = 100
x_desired = 10.0
x_actual = x_initial
trajectory = []
for _ in range(num_steps):
u_optimal = model_predictive_control(x_actual, x_desired, Q, R, control_bounds)
x_actual = vehicle_dynamics(x_actual, u_optimal)
trajectory.append(x_actual)
trajectory = np.array(trajectory)
# Plot the path tracking results
plt.plot(range(num_steps), trajectory, label='Actual Path', linestyle='dashed')
plt.axhline(y=x_desired, color='r', linestyle='--', label='Desired Position')
plt.title('Model Predictive Control Example')
plt.xlabel('Steps')
plt.ylabel('Position')
plt.legend()
plt.show()
if __name__ == "__main__":
main()上述代码的实现流程如下所示:
- 首先,定义了车辆动力学模型 vehicle_dynamics,其中包括时间步长和状态方程。
- 然后,通过代价函数 cost_function 表达了模型的目标与当前状态的差异,并赋予了控制输入的成本。
- 接着,模型预测控制算法 model_predictive_control 利用 minimize 函数对控制输入进行优化,以最小化代价函数,同时考虑了控制输入的约束。在主循环中,通过不断调用模型预测控制算法和车辆动力学模型,实现了在离散时间步内逐渐接近目标位置的路径跟踪。
- 最后,通过可视化图展示了实际路径与期望位置的对比。
2.2.5 滑模控制算法
滑模控制算法(Sliding Mode Control,SMC)是一种强大的非线性控制方法,旨在通过引入一个称为滑模面的超平面来实现系统的鲁棒稳定性和快速响应。其核心思想是在系统动力学方程中引入一个滑模面,使得系统状态在该面上快速滑动,从而实现对系统鲁棒性的增强效果。实现SMC的基本步骤如下所示。
(1)设计滑模面:选择一个超平面,称为滑模面,通过该面系统状态能够快速滑动。这通常涉及引入一个滑模控制律,以使系统状态在该面上收敛。
(2)引入控制律:引入一个控制律,通过该控制律使系统状态在滑模面上保持滑动。这通常涉及到在系统动力学方程中引入控制输入,以推动系统状态到滑模面上。
(3)设计鲁棒控制:考虑系统不确定性和外部扰动,设计鲁棒控制策略,以保证系统在存在不确定性时仍然能够保持稳定。
(4)性能分析与调整:对设计的滑模控制系统进行性能分析,调整参数以满足性能和稳定性的要求。
在现实应用中,滑模控制算法在面对非线性、不确定性和外部扰动等复杂系统时表现出色,被广泛应用于控制工程、自动化和机器人等领域。例如下面是一个使用滑模控制算法实现机器人位置控制的例子,在该例子中,假设机器人在一维空间中移动,目标是使机器人的位置迅速、鲁棒地达到设定的目标位置。
实例2-8:使用滑模控制算法实现机器人位置控制(源码路径:codes\2\locate\hua.py)
实例文件hua.py的具体实现代码如下所示。
import numpy as np
import matplotlib.pyplot as plt
class RobotController:
def __init__(self, target_position):
self.target_position = target_position
self.k = 1.0 # 控制增益
self.delta = 0.1 # 滑模面斜率
def sliding_mode_control(self, current_position, velocity):
error = current_position - self.target_position
sliding_surface = error + self.delta * np.sign(error)
control_input = -self.k * sliding_surface - velocity
return control_input
def simulate_robot_motion(controller, initial_position, initial_velocity, simulation_time, dt):
positions = [initial_position]
velocities = [initial_velocity]
for _ in range(int(simulation_time / dt)):
current_position = positions[-1]
current_velocity = velocities[-1]
control_input = controller.sliding_mode_control(current_position, current_velocity)
new_velocity = current_velocity + control_input * dt
new_position = current_position + new_velocity * dt
positions.append(new_position)
velocities.append(new_velocity)
return positions, velocities
def main():
target_position = 5.0
initial_position = 0.0
initial_velocity = 0.0
simulation_time = 10.0
dt = 0.1
controller = RobotController(target_position)
positions, velocities = simulate_robot_motion(controller, initial_position, initial_velocity, simulation_time, dt)
# 绘制结果
plt.plot(np.arange(0, simulation_time + dt, dt), positions, label='Robot Position')
plt.axhline(y=target_position, color='r', linestyle='--', label='Target Position')
plt.title('Sliding Mode Control for Robot Position')
plt.xlabel('Time')
plt.ylabel('Position')
plt.legend()
plt.show()
if __name__ == "__main__":
main()上述代码的实现流程如下所示:
- 首先,创建一个RobotController类,初始化目标位置、控制增益、滑模面斜率等参数。
- 然后,在滑模控制类中定义sliding_mode_control方法,该方法接收当前机器人位置和速度作为输入,并计算滑模控制输入。
- 接着,编写simulate_robot_motion函数,该函数的功能是模拟机器人的运动。在循环中,根据当前位置和速度,使用滑模控制器计算控制输入,然后更新机器人的速度和位置。
- 最后,调用函数simulate_robot_motion进行模拟,并绘制机器人位置随时间的变化曲线,效果如图2-6所示。在图中,包括实际机器人位置和目标位置的对比。
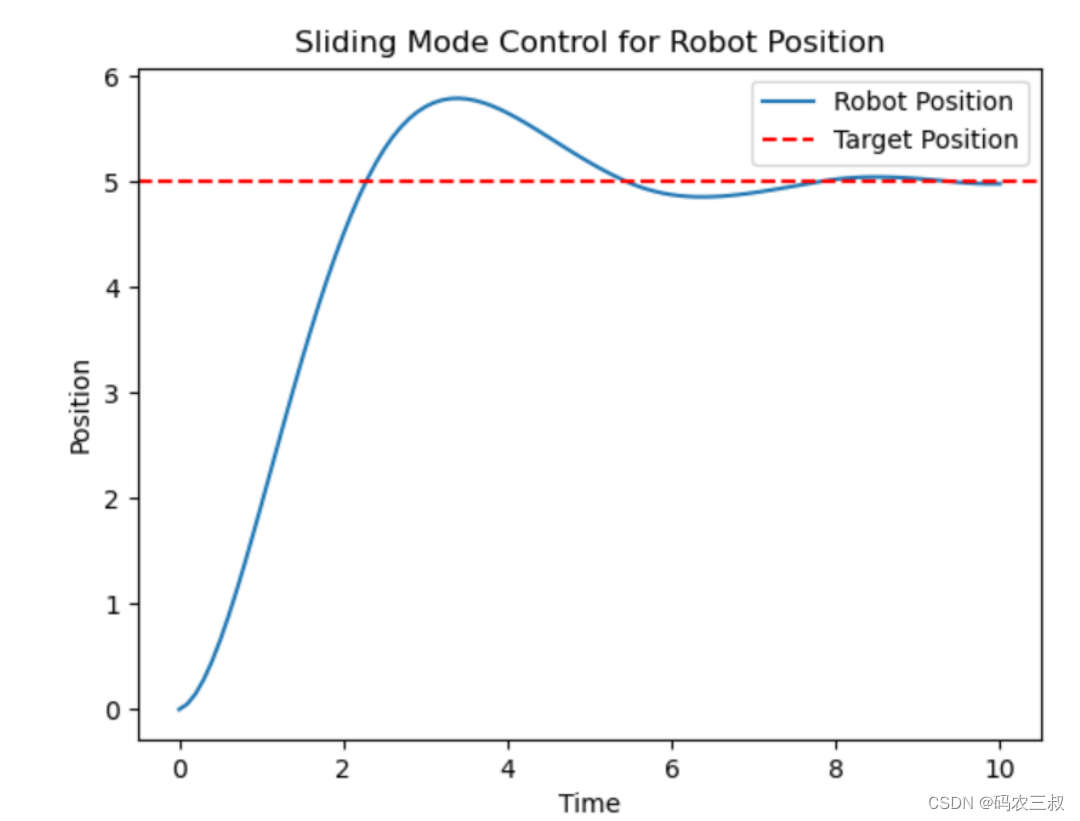
图2-6 机器人位置变化曲线图
2.2.6 自适应控制算法
自适应控制算法是一种能够根据系统动态特性和参数的变化,自动地调整控制器参数以维持系统性能的控制策略。其目标是实现对于未知和时变系统的鲁棒性控制,使系统具有良好的跟踪和稳定性能。自适应控制算法通过实时地调整控制器参数,可以适应系统的变化,从而提高系统的鲁棒性和性能。
1. 基本概念
- 参数调整策略:自适应控制算法通过监测系统的输出和状态,不断地调整控制器的参数。这些调整可以基于误差信号、系统的辨识模型或其他反馈信号。
- 鲁棒性:自适应控制算法的设计目标之一是提高系统对于外部扰动和参数变化的鲁棒性,使得系统在面对不确定性时仍能保持良好的控制性能。
- 模型参考:一种常见的自适应控制策略是基于模型参考,其中系统的辨识模型用于调整控制器参数,以使系统的输出趋向于参考模型的输出。
2. 应用领域
- 机器人控制:在机器人领域,自适应控制算法可用于调整机器人控制器的参数,以适应不同的任务和工作环境,提高机器人的运动性能和精度。
- 飞行器控制:在飞行器的控制系统中,自适应控制算法可以应对飞行过程中的气流变化、载荷变化等不确定性,提高飞行器的稳定性和控制性能。
- 工业过程控制:在工业自动化中,自适应控制算法可以用于调整控制系统的参数,以适应不同的工艺条件和生产需求,提高工业过程的控制精度和效率。
总体而言,自适应控制算法在面对复杂、时变和未知的系统时具有广泛的应用,为控制系统提供了一种灵活而有效的调节机制。例如下面是一个使用自适应控制算法的例子,模拟了机器人在外部干扰下的位置控制过程。其中,自适应参数通过自适应律进行调整,以适应系统的外部干扰和变化。用户需要根据具体应用调整控制输入的计算方法。
实例2-8:使用自适应控制算法控制机器人的位置(源码路径:codes\2\locate\zi.py)
实例文件zi.py的具体实现代码如下所示。
class AdaptiveControl:
def __init__(self, dt, initial_position, reference_position):
self.dt = dt
self.position = initial_position
self.reference_position = reference_position
self.adaptive_parameter = 1.0
def update_position(self, control_input):
disturbance = 0.1 * np.sin(2 * np.pi * 0.1 * self.dt) # 模拟外部干扰
error = self.reference_position - self.position + disturbance
# 自适应法则
adaptive_law = -self.adaptive_parameter * np.sign(error)
# 更新自适应参数
self.adaptive_parameter += 0.01 * error * control_input
# 控制法则
control_law = error + self.adaptive_parameter * np.sign(error) # 调整后的控制法则
# 更新位置
self.position += control_law * self.dt
return self.position
def main():
dt = 0.1
initial_position = 0.0
reference_position = 1.0
adaptive_control = AdaptiveControl(dt, initial_position, reference_position)
num_steps = 100
positions = []
for _ in range(num_steps):
control_input = 0.5 # 用你的控制输入计算替代
current_position = adaptive_control.update_position(control_input)
positions.append(current_position)
# 绘制结果
plt.plot(range(num_steps), positions, label='Actual Position', linestyle='dashed')
plt.axhline(y=reference_position, color='r', linestyle='--', label='Reference Position')
plt.title('Adaptive Control Example')
plt.xlabel('Steps')
plt.ylabel('Position')
plt.legend()
plt.show()
if __name__ == "__main__":
main()上述代码的实现流程如下所示:
- 首先,定义了类AdaptiveControl的,其中包含了初始化方法__init__,用于设置时间步长(dt)、初始位置(initial_position)、参考位置(reference_position)以及自适应参数(adaptive_parameter)。
- 然后,在类AdaptiveControl中实现了update_position方法,该方法接收控制输入(control_input)并执行自适应控制算法。在该方法中,模拟外部干扰,并计算位置误差。通过自适应法则,更新自适应参数,然后使用调整后的控制法则来更新位置。
- 接着,在main函数中创建了AdaptiveControl的实例,并进行了100个步长的模拟。在每个步长中,提供一个固定的控制输入,通过调用update_position方法来更新实际位置,并将结果保存在列表中。
- 最后,通过matplotlib库绘制了实际位置曲线和参考位置曲线,展示了自适应控制算法的实际效果。效果如图2-7所示。
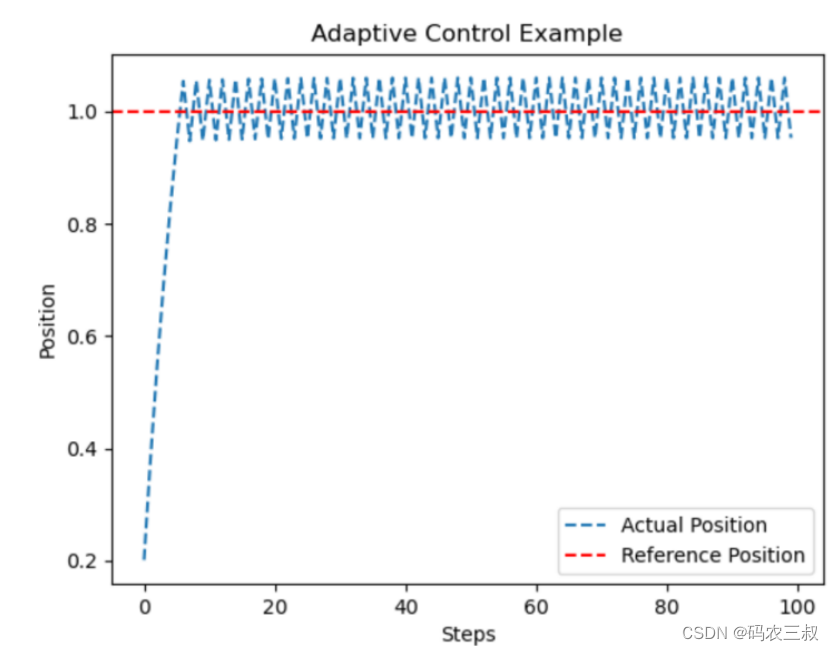
图2-7 实际位置曲线和参考位置曲线图

















 1500
1500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











