







最小二乘法求解三维坐标值
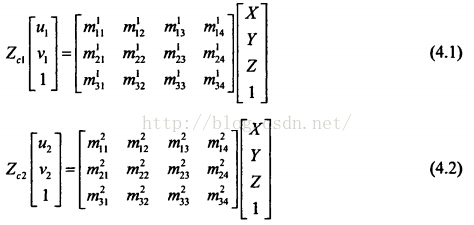
下面我们来具体介绍求解三维点坐标的算法。在进行讨论之前,我们要明确一下几点基本假设:空间任意点P在两个摄像机C1与C2上的图像点平p1与p2已经从两个图像中分别检测出来。即已知p1与p2为空间同一点P的对应点。至于对应点是如何找到的,这属于图像配准问题。还有一个假设就是,摄像机C1与C2已标定,他们的投影矩阵分别为M1与M2,于是有:
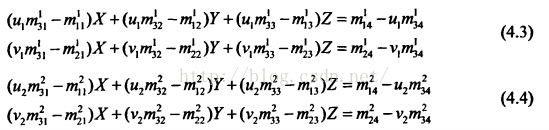
其中,(u1,v1,1)与(u2,v2,1)分别为P1与P2点在各自图像中的图像齐次坐标;(X,y,Z,1)为P点在世界坐标系下的齐次坐标;mijk为Mk的第i行第j列元素。式(4.1)与式(4.2)消去Zc1与Zc2得到关于X,Y,Z的四个线性方程:
由于空间点P是O1p1与O2p2的交点,它必然同时满足式(4.3),式(4.4),我们可以联立这四个式子,从而求出P点的坐标(X,Y,Z)。四个方程,三个未知数,也就是说这个方程组只有三个独立的方程,这是因为我们已经假设P1与P2点是空间同一点P的对应点,因此已经假设了直线O1p1与O2p2一定相交,或者说,这四个方程必定有解,而且解是唯一的。而实际应用中,由于数据总是有噪声的,我们可以用最小二乘法求出P的三维点坐标(X,Y,Z)。
转载自:https://blog.csdn.net/m0_37598482/article/details/78645457














 4128
4128











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









