







文章目录
Nvidia NX
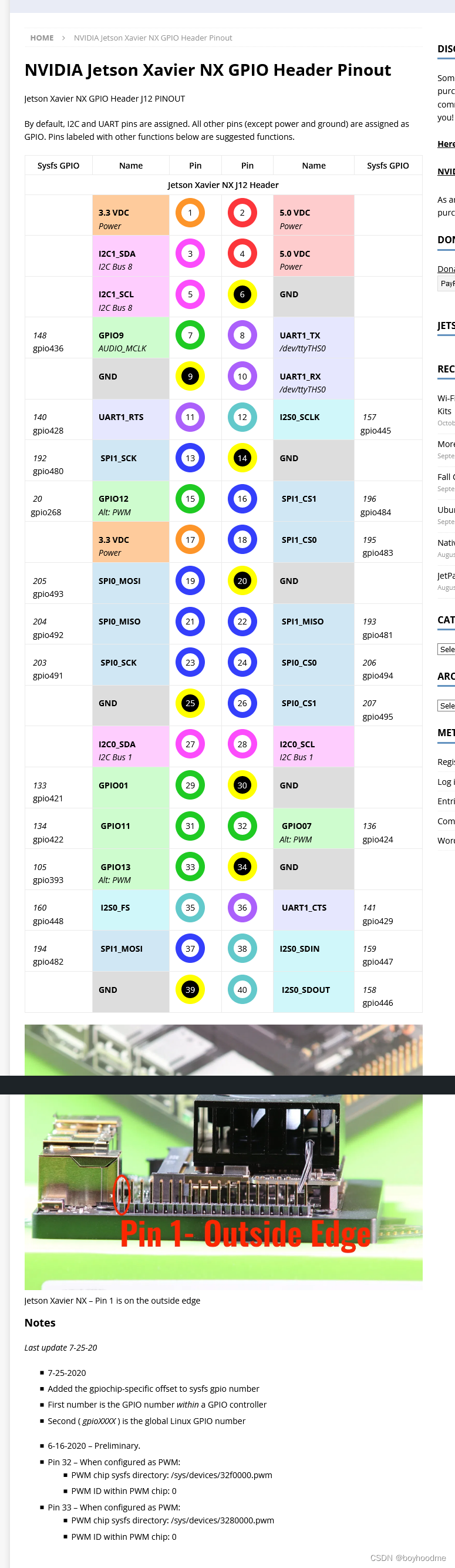
1. 针脚定义
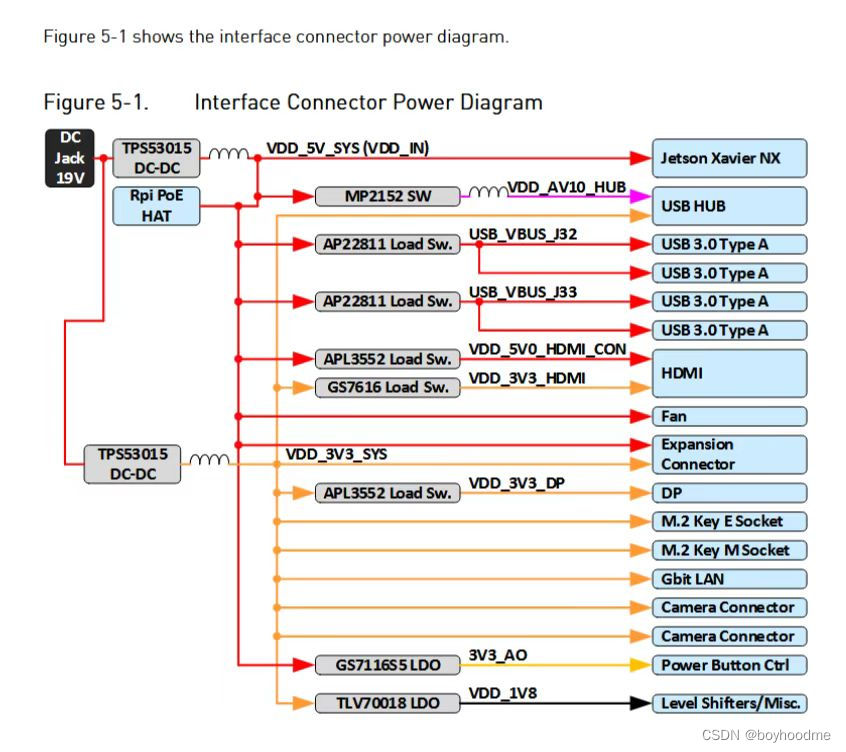
2. 电源接口关系图
3. 使用技巧
值得一提的是,NX的针脚中ttyTHS0可以用作mavros的通信端口,正好的Tx/Rx串口通信,只需要交叉接线即可,并每次运行时为该端口赋予sudo chmod 777 /dev/ttyTHS0读写权限。
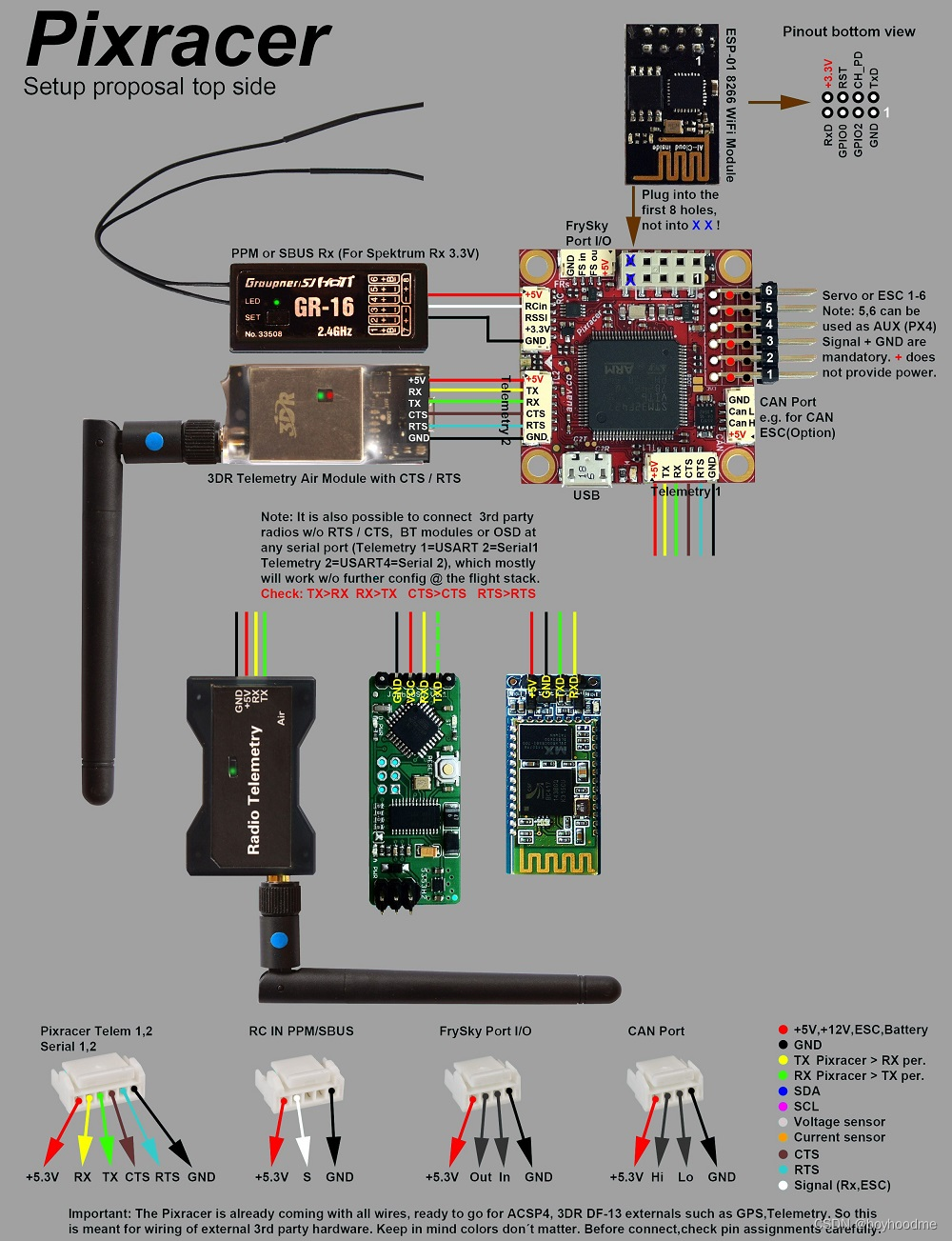
Pixracer接线指南
- 正反面引脚定义
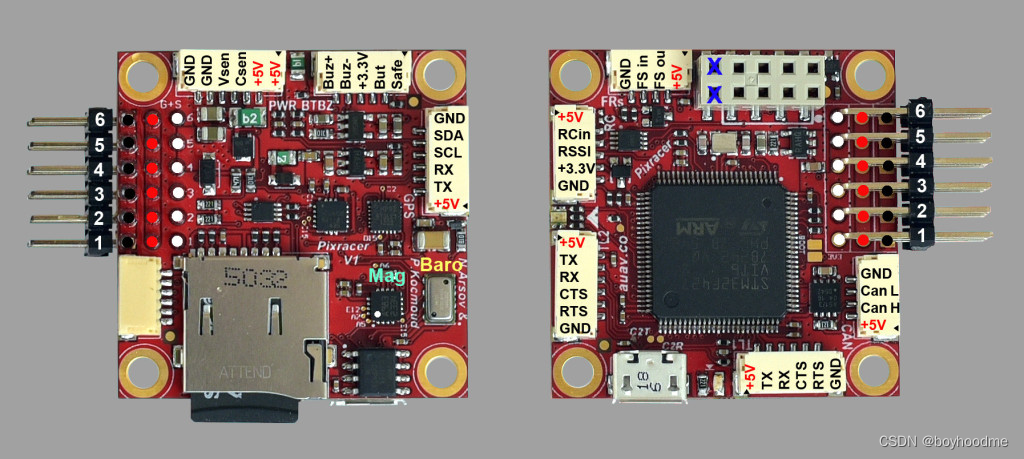
- 接口含义
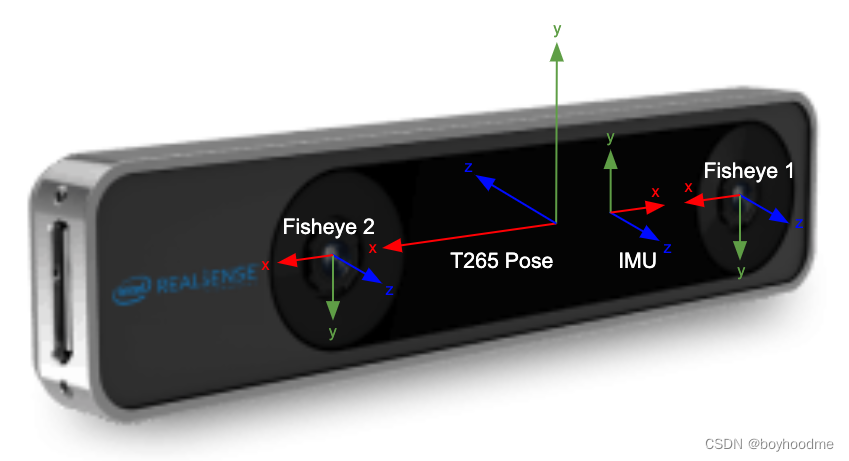
T265坐标系
BLheliSuite调参软件 官方下载:
https://www.mediafire.com/folder/dx6kfaasyo24l/BLHeliSuite
我使用的版本BLHeliSuite32_32.9.0.3.zip可以从如下百度网盘获取:
链接: https://pan.baidu.com/s/1vBk9193RsGNqxH17_O8McQ?pwd=1234 提取码: 1234
BL32电调调参教程
https://kdocs.cn/l/sq0xN4SNCJLG
我参考这个文档
CP210X驱动程序:
https://kdocs.cn/l/siRsogVvfhUp















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









