







在现代机器人技术的快速发展中,精确的定位与导航是实现自主移动的关键。传统的定位技术,如GPS,虽然在开阔环境中表现良好,但在城市峡谷、室内或遮挡环境中常常失效。因此,探索更为可靠的定位方法显得尤为重要。天文导航作为一种利用天体位置进行定位的技术,提供了一种创新的解决方案。本文将介绍基于天文导航的机器人定位的基本原理及其在实际应用中的潜力。
天文导航概述
天文导航是通过观测天体(如太阳、月亮和恒星)的位置来确定物体在地球表面或空中位置的技术。它依赖于天体的已知位置和观测者的位置,可以在不依赖地面基站的情况下进行定位。天文导航的优点在于其在广阔空间中的有效性,尤其是在远离城市基础设施的环境中。
机器人定位的挑战
在机器人定位中,面临许多挑战:
- 环境复杂性:城市环境中的建筑物、桥梁等会导致信号反射和遮挡,影响定位精度。
- 动态变化:移动障碍物和环境条件的变化会影响传感器的性能。
- 长时间运行中的误差积累:传统传感器,如惯性测量单元(IMU),在长时间运行中会出现累积误差。
基于天文导航的定位方法可以有效地解决上述问题,提供更可靠的定位解决方案。
基于天文导航的机器人定位实现
1. 系统设计
机器人定位系统应包括以下组件:
- 传感器:用于观测天体的设备,如天文望远镜或光学传感器。
- 计算单元:用于处理观测数据,计算机器人的位置。
- 导航算法:实现基于天文观测的定位算法。
2. MATLAB实现示例
以下是一个简单的MATLAB代码示例,展示如何实现基于天文导航的机器人定位。
% 基于天文导航的机器人定位示例
% 时间参数
dt = 0.1; % 时间步长
T = 10; % 总时间
time = 0:dt:T; % 时间向量
% 机器人初始状态
robot_position = [0; 0]; % 初始位置 (x, y)
robot_velocity = [1; 0]; % 初始速度 (vx, vy)
% 天文导航目标位置
star_position = [5; 5]; % 目标天文位置
% 参数设置
num_steps = length(time); % 时间步数
robot_positions = zeros(2, num_steps); % 存储机器人位置
nav_positions = zeros(2, num_steps); % 存储天文导航位置
% 机器人运动模型
for i = 1:num_steps
% 更新机器人位置
robot_position = robot_position + robot_velocity * dt;
robot_positions(:, i) = robot_position; % 存储机器人位置
end
% 绘制结果
figure;
plot(robot_positions(1, :), robot_positions(2, :), 'r-', 'LineWidth', 2, 'DisplayName', '机器人位置');
hold on;
xlabel('X位置');
ylabel('Y位置');
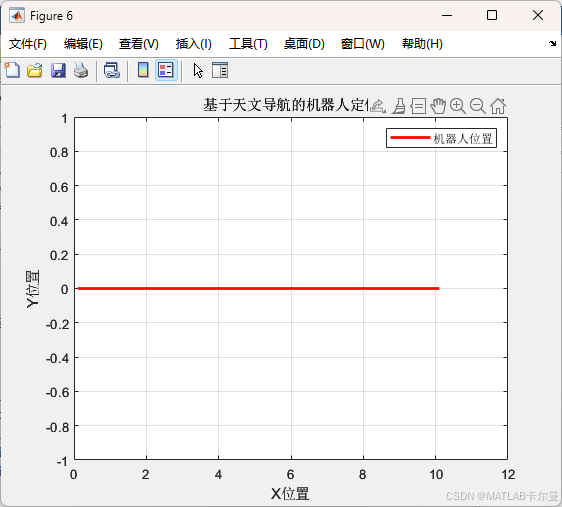
title('基于天文导航的机器人定位');
legend;
grid on; % 显示网格
运行结果:
3. 代码说明
- 时间参数:设置时间步长和总时间,并生成时间向量。
- 机器人初始状态:定义机器人初始位置和速度。
- 机器人运动模型:在每个时间步中,更新机器人的位置并存储。
- 天文导航修正:假设天文导航提供一个固定位置。
- 结果可视化:使用绘图展示机器人的运动轨迹和天文导航位置。
应用前景
基于天文导航的机器人定位在多个领域具有广阔的应用前景,如:
- 遥感与勘探:在海洋、极地或外太空等远离城市的区域,天文导航可以提供可靠的定位。
- 无人驾驶:结合天文导航与其他传感器(如激光雷达和IMU),可提高无人驾驶车辆的定位精度。
- 探测与监测:在复杂环境中,使用天文导航可以提高监测设备的定位能力。
结论
基于天文导航的机器人定位技术为解决传统定位方法中存在的问题提供了新的思路。随着技术的发展及应用的推广,天文导航将在未来的机器人定位领域发挥越来越重要的作用。希望在2025年,这一课题能够引起更多的关注与研究,推动相关技术的进步与创新。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 958
958

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











