







碰撞检测最基本的初衷:在人机交互的过程中,不能够伤害到人。
主要使用的方法:力觉,用人与机器人进行力觉的估计,进行检测。
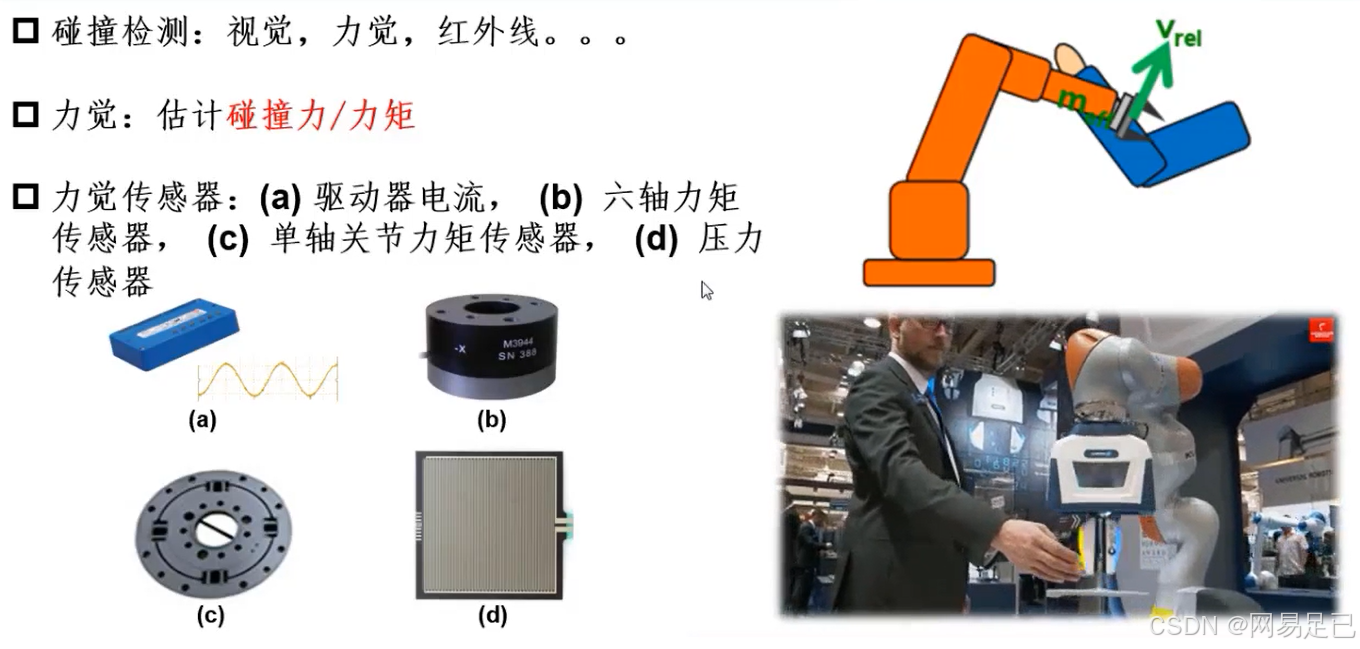
碰撞力检测:
检测的方法:
1.在机器人的表面添加一层压力传感器进行检测,成本高
2.在机器人的末端添加力觉传感器进行检测,缺点只能检测小范围,力觉传感器之前的碰撞
3.在机器人的底座添加力觉传感器进行检测,可以进行全臂检测,缺点,成本高
碰撞力矩检测:
力矩是力臂的问题,而力不需要力臂,即使力臂为0,还是受力的。力矩检测时,力矩检测点离力臂太短是不能够进行检测的,碰撞力很大,力矩很小也是检测不出来的。
 检测方法
检测方法
1.电流环进行控制电机停止和急停等操作。应用于小的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









