







SHIFT:A Synthetic Driving Dataset for Continuous Multi-Task Domain Adaptation
本文介绍一个新的自动驾驶仿真数据集:SHIFT,论文收录于 CVPR2022。适应连续变化的环境是自动驾驶系统一直以来要面临的挑战。然而,目前现有的图像和视频驾驶数据集无法反应真实世界的变化本质。
因此论文作者介绍了一个最大的自动驾驶多任务合成数据集SHIFT。在云量、雨量和雾的密度、光照时间、车辆和行人密度等方面呈现离散和连续的变化。SHIFT 数据集包含综合的传感器套件和多种主流感知任务的注释,可以在域变化上研究感知系统性能的退化,促进连续域适应策略的研究。虽然是仿真数据集,但是在其上观察到的感知算法域变化趋势与真实数据集基本相符,未来将会有助于合理收集真实数据集和开发感知算法。
数据集主页:https://www.vis.xyz/shift/
The SHIFT Dataset
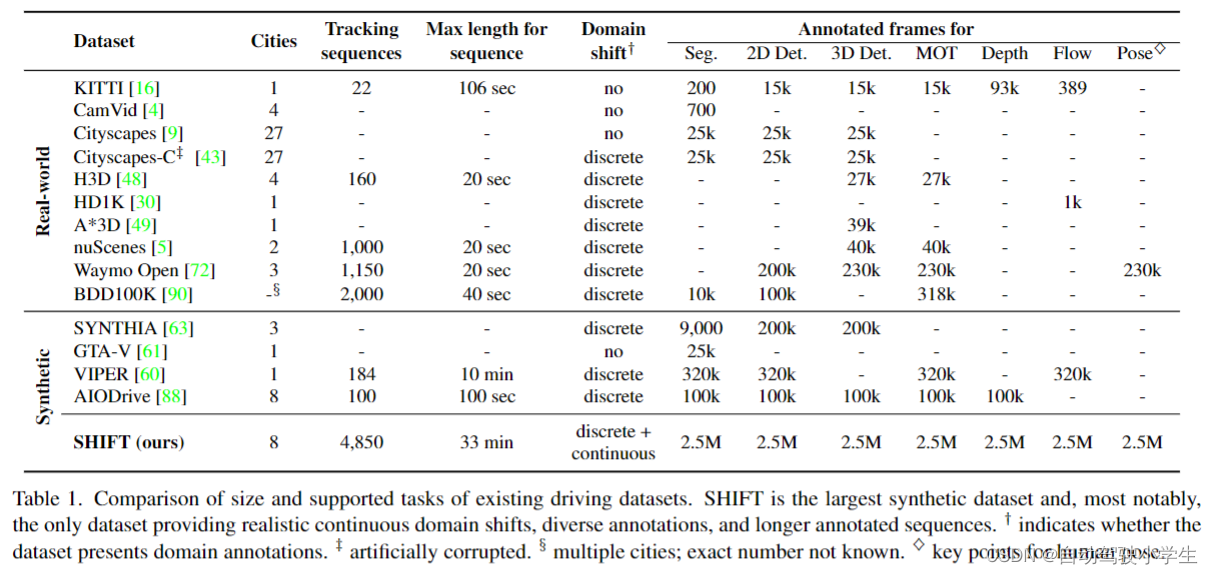
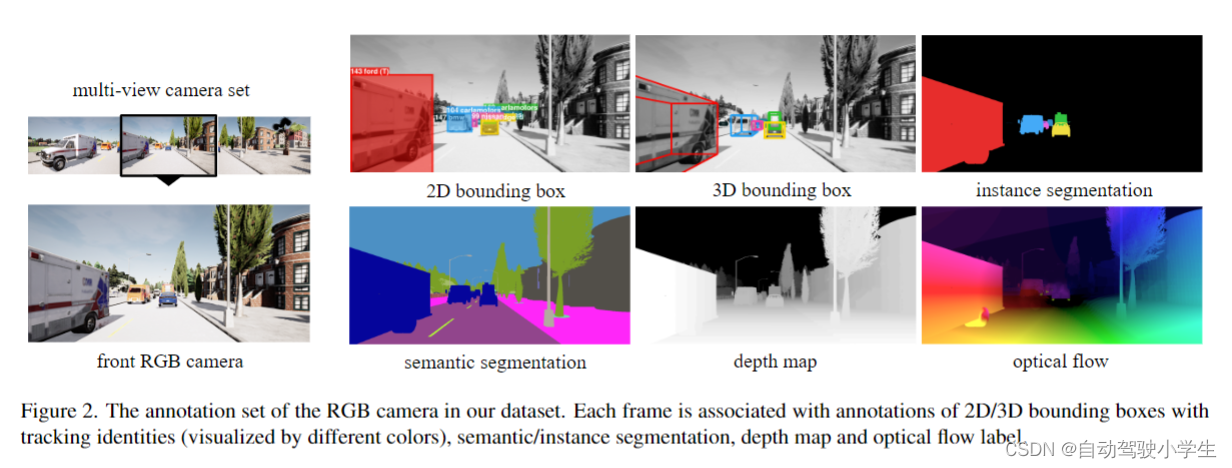
论文引言和相关工作就不介绍了,这里直接介绍 SHIFT 数据集。表1是现有公开的自动驾驶数据集的比较,可以看到 SHIFT 是最大的合成数据集,也是唯一一个提供连续域变化的数据集。SHIFT 总共包含4850个序列,最长的序列有33分钟,250万帧注释,注释包括物体2D/3D框、语义/实例分割、2D/3D多目标追踪ID、深度图、光流图等。
SHIFT 数据集传感器布置如下图所示,包含5个RGB摄像头、一对双目摄像头、一个深度摄像头、一个光流传感器和GNSS/IMU以及128线激光雷达,所有传感器进行了时间同步和空间同步,采样频率为10Hz。

SHIFT 数据集的一大特色就是提供了不同条件下的数据,一共包含24种域。除了离散域,还包含连续域,如下图所示,从白天到夜晚的的连续数据,以及从晴天到雨天的连续数据。

Experiments
SHIFT 数据集主要用于研究感知算法在域变化时的性能。作者这里测试了四种域适应测略:Targeted DA、Untargeted DA、Incremental DA、Continusous TTA。

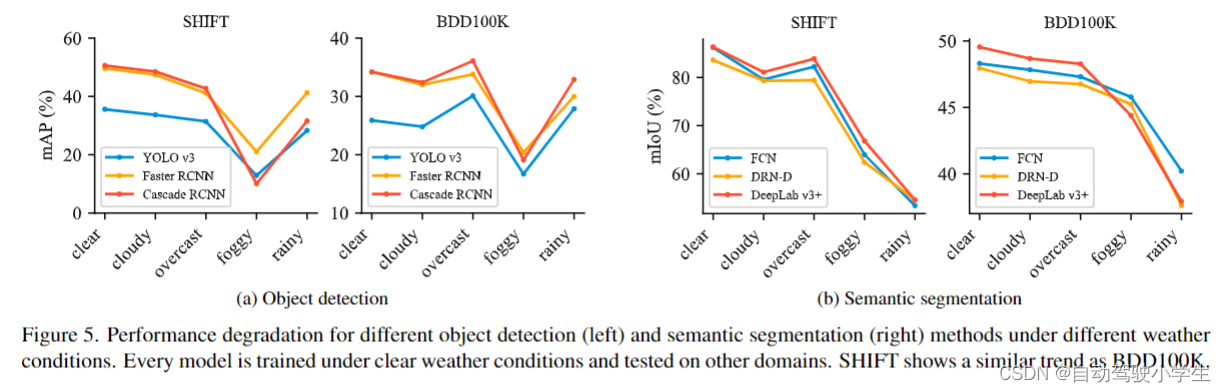
每一个模型都是在 clear-daytime domain 下训练的,然后在其它域下测试。可以看到仿真数据集和真实数据集上模型都有着相同的变化趋势。
在不确定性估计中,在 BDD100K上证实了SHIFT上观察到的校准的整体退化,仿真数据与真实数据的结论基本一致。

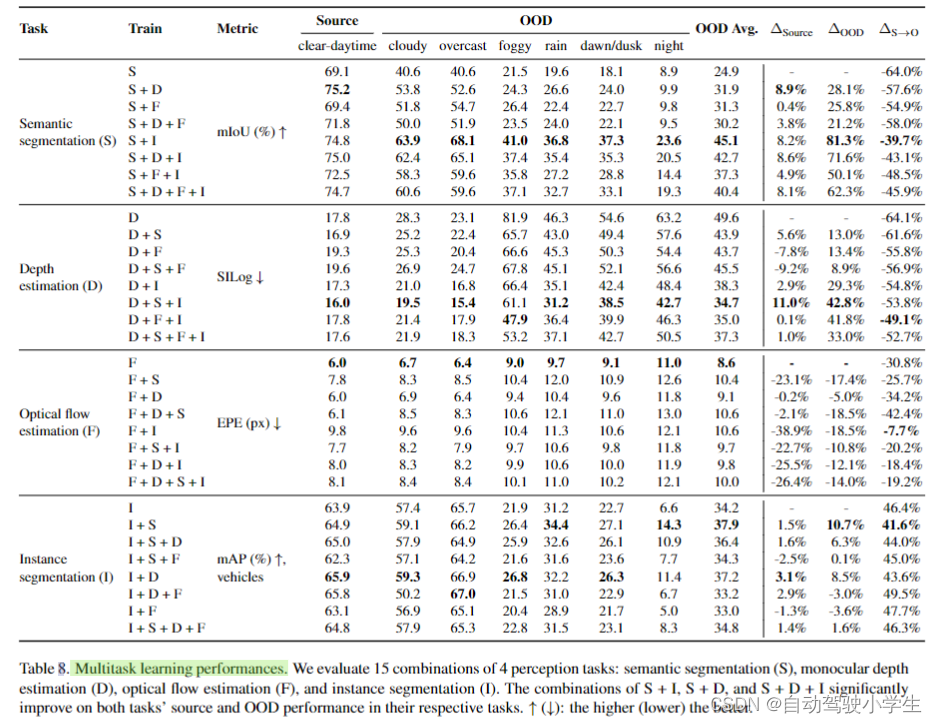
在多任务学习上,可以看到适当的任务组合能够有效抵消域变化的影响,提高雨天、雾天、夜晚的模型性能。


















 1153
1153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









