







这里探讨一下八叉树建立过程的两种不同方式
1、定义包围盒
2、不定义包围盒
从建立八叉树的步骤,以及建立出来的八叉树的深度进行分析。
1、定义包围盒
八叉树是立方体结构,而且最外层八叉树是和八叉树的分辨率成倍数关系的(幂次关系),因此需要调整点云的最小包围盒,具体调整的步骤如下:
1、计算点云的最小包围盒,
2、根据点云八叉树的分辨率,计算八叉树的深度,计算八叉树根节点包围盒需要往外扩张的大小
getKeyBitSize ();
//计算深度
this->octree_depth_ = std::max ((std::min (static_cast<unsigned int>
(OctreeKey::maxDepth), static_cast<unsigned int> (ceil (this->Log2
(max_voxels)-minValue)))), static_cast<unsigned int> (0));
//计算八叉树应该的边长
octree_side_len = static_cast<double> (1 << this->octree_depth_) * resolution_;
octree_oversize_x = (octree_side_len - (max_x_ - min_x_)) / 2.0;
octree_oversize_y = (octree_side_len - (max_y_ - min_y_)) / 2.0;
octree_oversize_z = (octree_side_len - (max_z_ - min_z_)) / 2.0;
其中octree_side_len是八叉树的最大立方体的边长。
然后根据上述结果将最小包围盒进行扩张。
定义好八叉树的包围盒之后,就可以将点云中的点加入到八叉树中,此时八叉树的深度,节点ID等等信息都已经固定了,不会有新的点改变八叉树的结构(只有出现八叉树包围盒之外的点,才会更新八叉树的结构)。
将一个点加入到八叉树中的主要步骤如下;
1、根据点的坐标计算Key
// make sure bounding box is big enough
adoptBoundingBoxToPoint (point);
// generate key
genOctreeKeyforPoint (point, key);
针对已经定义包围盒的情况,adoptBoundingBoxToPoint (point);这一步是不需要的,直接跳过。
2、根据Key,生成相应的叶子节点
LeafNode* leaf_node;
BranchNode* parent_branch_of_leaf_node;
unsigned int depth_mask = this->createLeafRecursive (key,
this->depth_mask_ ,this->root_node_, leaf_node, parent_branch_of_leaf_node);
八叉树叶子节点中只存在容器,分支节点存在空容器和八个子节点
可以通过八叉树迭代器获取当前节点的信息:
// Octree iterator state pushed on stack/list
struct IteratorState{
OctreeNode* node_;
OctreeKey key_;
unsigned char depth_;
};
3、将点云索引加入到叶子节点容器中
(*leaf_node)->addPointIndex (point_idx_arg);
2、不定义包围盒
如果不定义包围盒,那么再将点加入到八叉树时,就需要更新包围盒。
(默认的八叉树包围盒时resolution大小的立方体)
将一个点加入到八叉树中的主要步骤如下;
1、根据点的坐标计算Key
// make sure bounding box is big enough
adoptBoundingBoxToPoint (point);
// generate key
genOctreeKeyforPoint (point, key);
针对未定义包围盒的情况,adoptBoundingBoxToPoint (point);
第一次就是以第一个点为中心,建立八个resolution大小的立方体
之后每加入一个点进行判断包围盒是否需要更新
bool bLowerBoundViolationX = (point_idx_arg.x < min_x_);
bool bLowerBoundViolationY = (point_idx_arg.y < min_y_);
bool bLowerBoundViolationZ = (point_idx_arg.z < min_z_);
bool bUpperBoundViolationX = (point_idx_arg.x >= max_x_);
bool bUpperBoundViolationY = (point_idx_arg.y >= max_y_);
bool bUpperBoundViolationZ = (point_idx_arg.z >= max_z_);
// do we violate any bounds?
if (bLowerBoundViolationX || bLowerBoundViolationY || bLowerBoundViolationZ || bUpperBoundViolationX
|| bUpperBoundViolationY || bUpperBoundViolationZ || (!bounding_box_defined_) )
如果需要更新,将当前的八叉树作为更新后的八叉树的一个子节点,八叉树的包围盒大小为原来的一倍,并且更新深度和边长。
// octree not empty - we add another tree level and thus increase its size by a factor of 2*2*2
child_idx = static_cast<unsigned char> (((!bUpperBoundViolationX) << 2) | ((!bUpperBoundViolationY) << 1)
| ((!bUpperBoundViolationZ)));
BranchNode* newRootBranch;
newRootBranch = new BranchNode();
this->branch_count_++;
this->setBranchChildPtr (*newRootBranch, child_idx, this->root_node_);
this->root_node_ = newRootBranch;
octreeSideLen = static_cast<double> (1 << this->octree_depth_) * resolution_;
if (!bUpperBoundViolationX)
min_x_ -= octreeSideLen;
if (!bUpperBoundViolationY)
min_y_ -= octreeSideLen;
if (!bUpperBoundViolationZ)
min_z_ -= octreeSideLen;
// configure tree depth of octree
this->octree_depth_++;
this->setTreeDepth (this->octree_depth_);
// recalculate bounding box width
octreeSideLen = static_cast<double> (1 << this->octree_depth_) * resolution_ - minValue;
// increase octree bounding box
max_x_ = min_x_ + octreeSideLen;
max_y_ = min_y_ + octreeSideLen;
max_z_ = min_z_ + octreeSideLen;
使用更新之后的包围盒计算Key,后面的步骤和之前一致。
2、根据Key,生成相应的叶子节点
LeafNode* leaf_node;
BranchNode* parent_branch_of_leaf_node;
unsigned int depth_mask = this->createLeafRecursive (key,
this->depth_mask_ ,this->root_node_, leaf_node, parent_branch_of_leaf_node);
八叉树叶子节点中只存在容器,分支节点存在空容器和八个子节点
可以通过八叉树迭代器获取当前节点的信息:
// Octree iterator state pushed on stack/list
struct IteratorState{
OctreeNode* node_;
OctreeKey key_;
unsigned char depth_;
};
3、将点云索引加入到叶子节点容器中
(*leaf_node)->addPointIndex (point_idx_arg);
3、实验测试
设计点云数据每个0.5生成一个点,范围为0-4,resolution=1,
理想情况下,点云深度应当为2层,每个节点中有一个点,总共46个点。
定义包围盒情况:
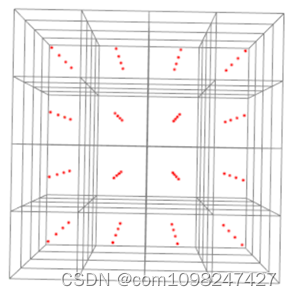
深度为2,符合最理想的情况
未定义包围盒:
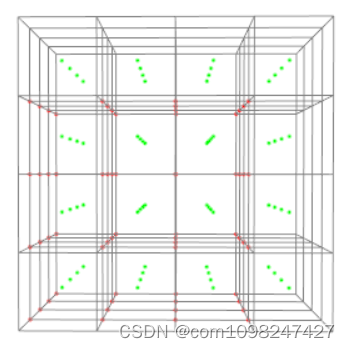
此时的八叉树深度为5,注意看上面两张图是不一样的,红色的是点云,绿色的是叶子节点的中心,这个八叉树以第一个点作为八叉树的中心,造成了八叉树结构分布不均匀,在进行遍历时,会影响计算速度。
综上所述,建立八叉树时,最好定义包围盒。
补:
八叉树的ID编码,
PCL中八叉树采用的编码应该也算是Matorn码(不确定),对八叉树节点的排序为以Z轴为第一循环轴,Y为第二循环轴,X为第三循环轴;
第一步:对Z轴进行从小打到排序
第二步:Y轴加一,接着对Z轴进行从小到大排序
第三步:Y轴加到最大,置为0,X轴加1,重复上述步骤
第四步:一直将XOY面遍历完毕。
最终的结果也是能够保证每个节点的ID是唯一的,这个和Morton码的编码类似,也是Z字形进行累加编码。
这样编码的话,深度增加,所有的大部分节点的ID都需要更改,每次都需要进行计算,这样明显浪费计算时间,如果采用Morton码,对于已编码的节点就不需要重新进行计算编码,能够在一定程度上节省计算时间。
附上2层八叉树的ID编码结构,64个节点,能够发现Key和ID的关系。
Key(3,3,3) 63
Key(3,3,2) 62
Key(3,2,3) 59
Key(3,2,2) 58
Key(2,3,3) 47
Key(2,3,2) 46
Key(2,2,3) 43
Key(2,2,2) 42
Key(3,3,1) 61
Key(3,3,0) 60
Key(3,2,1) 57
Key(3,2,0) 56
Key(2,3,1) 45
Key(2,3,0) 44
Key(2,2,1) 41
Key(2,2,0) 40
Key(3,1,3) 55
Key(3,1,2) 54
Key(3,0,3) 51
Key(3,0,2) 50
Key(2,1,3) 39
Key(2,1,2) 38
Key(2,0,3) 35
Key(2,0,2) 34
Key(3,1,1) 53
Key(3,1,0) 52
Key(3,0,1) 49
Key(3,0,0) 48
Key(2,1,1) 37
Key(2,1,0) 36
Key(2,0,1) 33
Key(2,0,0) 32
Key(1,3,3) 31
Key(1,3,2) 30
Key(1,2,3) 27
Key(1,2,2) 26
Key(0,3,3) 15
Key(0,3,2) 14
Key(0,2,3) 11
Key(0,2,2) 10
Key(1,3,1) 29
Key(1,3,0) 28
Key(1,2,1) 25
Key(1,2,0) 24
Key(0,3,1) 13
Key(0,3,0) 12
Key(0,2,1) 9
Key(0,2,0) 8
Key(1,1,3) 23
Key(1,1,2) 22
Key(1,0,3) 19
Key(1,0,2) 18
Key(0,1,3) 7
Key(0,1,2) 6
Key(0,0,3) 3
Key(0,0,2) 2
Key(1,1,1) 21
Key(1,1,0) 20
Key(1,0,1) 17
Key(1,0,0) 16
Key(0,1,1) 5
Key(0,1,0) 4
Key(0,0,1) 1
Key(0,0,0) 0
这种编码深度变化时,所有的数据都需要重新计算,Morton码应当是不需要重新计算的,往外拓展时,对原来的编码没有影响,这样对比,还是Morton更优,后面可以进行相关的实现。















 677
677











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









