






 在 MoveIt 中,运动规划器是使用插件基础设施 plugin infrastructure 加载的。这允许 MoveIt 在运行时加载运动规划器。在这个例子中,我们将运行所需的 C++代码来实现这一点。
在 MoveIt 中,运动规划器是使用插件基础设施 plugin infrastructure 加载的。这允许 MoveIt 在运行时加载运动规划器。在这个例子中,我们将运行所需的 C++代码来实现这一点。
入门
如果您还没有这样做,请确保您已完成入门中的步骤。
运行演示
打开两个 shell。在第一个 shell 中启动 RViz 并等待所有内容加载完成:
ros2 launch moveit2_tutorials move_group.launch.py在第二个 shell 中,运行启动文件:
ros2 launch moveit2_tutorials motion_planning_api_tutorial.launch.py注意:本教程使用 RvizVisualToolsGui 面板逐步演示。要将此面板添加到 RViz,请按照可视化教程中的说明进行操作。
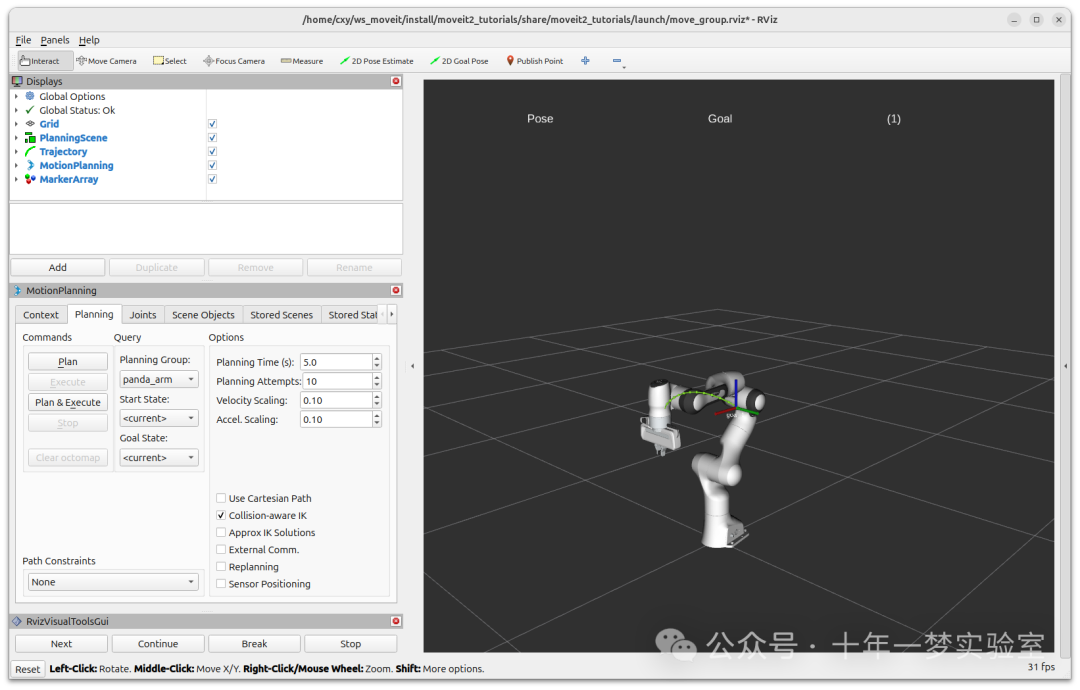
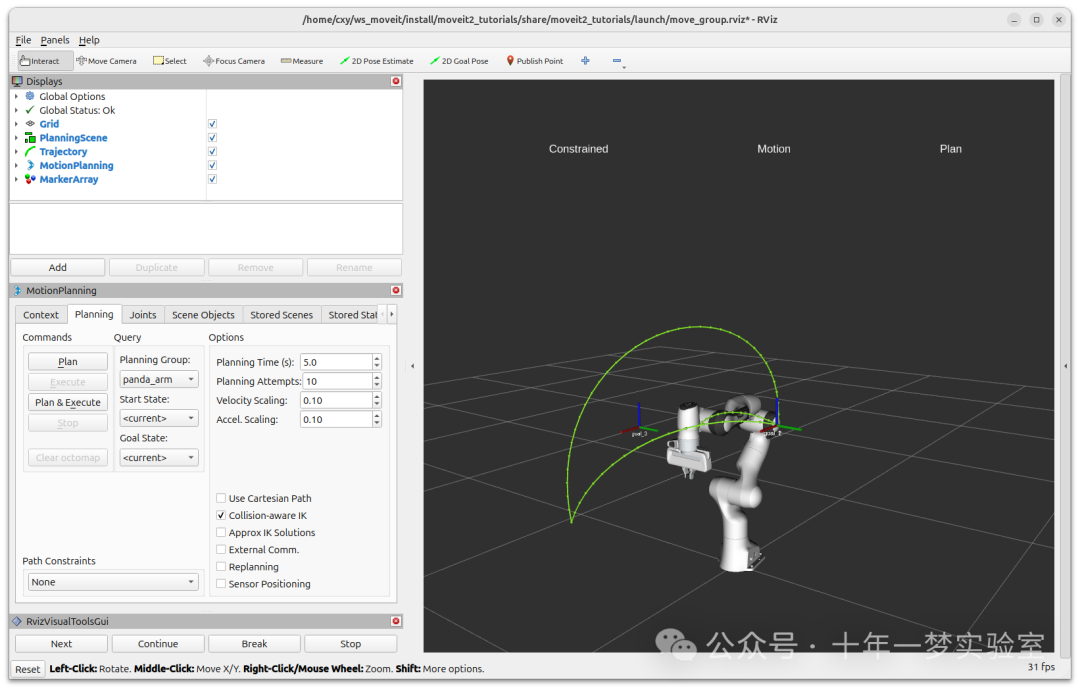
片刻之后,RViz 窗口应该会出现,并且看起来与此页面顶部的窗口类似。要通过每个演示步骤,请按屏幕底部的 RvizVisualToolsGui 面板中的 Next 按钮,或在屏幕顶部的 Tools 面板中选择 Key Tool,然后在 RViz 聚焦时按键盘上的 N 键。
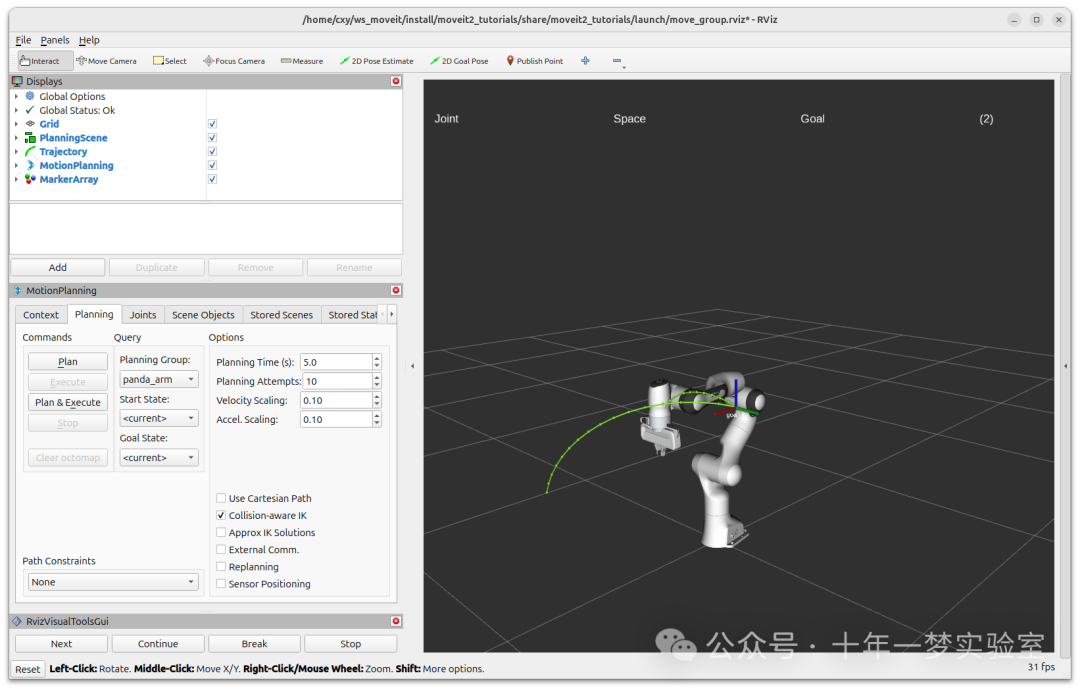
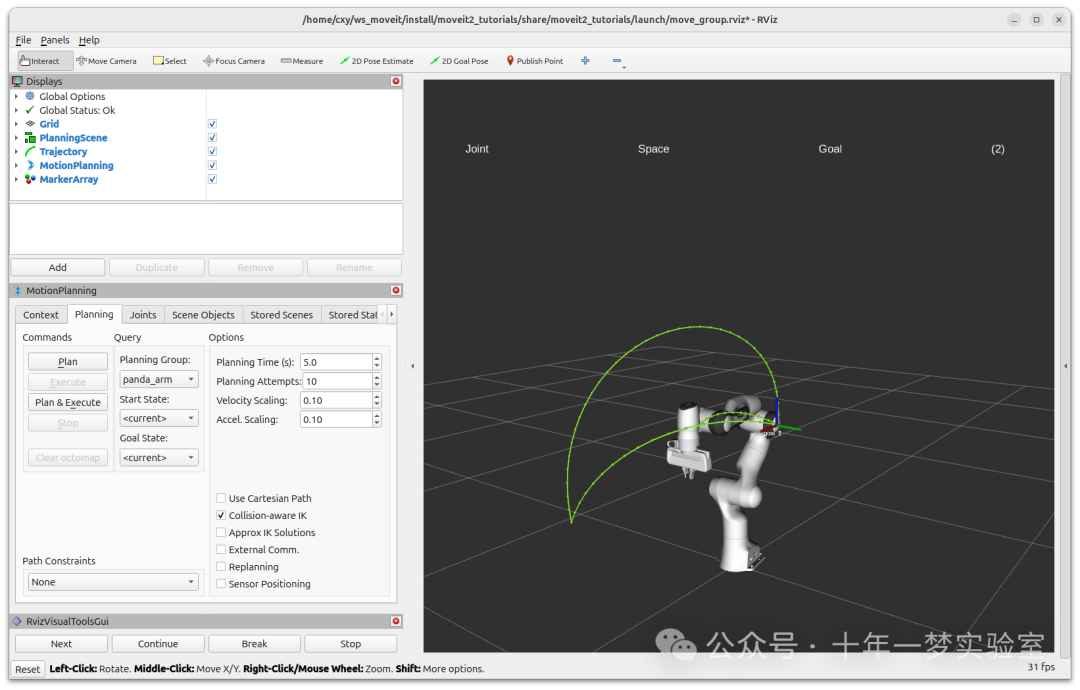
预期输出
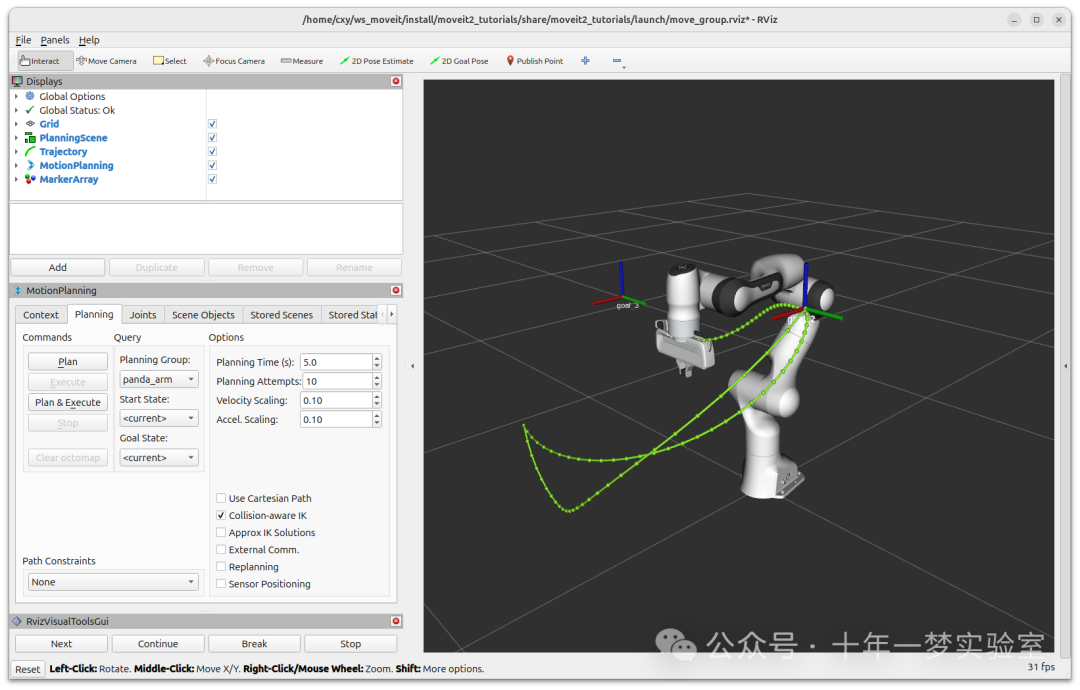
在 RViz 中,我们最终应该能够看到四条轨迹被重放:
机器人将其手臂移动到第一个姿势目标,
机器人将其手臂移动到关节目标,
机器人将其手臂移回到原始姿势目标,
机器人在保持末端执行器水平的同时,将其手臂移动到一个新的姿态目标。
整个代码
整个代码可以在 moveit_tutorials GitHub 项目中看到。https://github.com/moveit/moveit2_tutorials/blob/main/doc/examples/motion_planning_api
这段代码展示了如何使用MoveIt和ROS 2进行运动规划。以下是代码的主要步骤和功能:
初始化和节点创建:
初始化ROS 2。
创建一个名为
motion_planning_api_tutorial的节点,并使用单线程执行器运行该节点。
加载机器人模型和规划场景:
使用
RobotModelLoader从ROS参数服务器加载机器人描述,并创建RobotModel对象。创建
RobotState和JointModelGroup对象以跟踪当前的机器人姿态和规划组。使用
RobotModel创建PlanningScene对象,该对象维护世界的状态(包括机器人)。
加载规划器插件:
使用ROS的
pluginlib库加载规划器插件。从ROS参数服务器获取规划插件的名称,并实例化规划器。
MoveGroupInterface和可视化工具:
创建
MoveGroupInterface对象以与规划组进行交互。使用
MoveItVisualTools进行可视化,包括在RViz中显示文本、轴和轨迹。
姿态目标规划:
创建一个运动规划请求,指定末端执行器的目标姿态。
设置位置和方向的容差。
调用规划器并解决规划问题。
可视化规划结果并在RViz中显示轨迹。
关节空间目标规划:
设置关节空间目标,并创建相应的运动规划请求。
调用规划器并解决规划问题。
可视化规划结果并在RViz中显示轨迹。
路径约束规划:
创建一个新的姿态目标,并添加路径约束(例如,保持末端执行器水平)。
设置规划空间的边界。
调用规划器并解决规划问题。
可视化规划结果并在RViz中显示轨迹。
结束和清理:
等待用户输入以继续演示或退出。
关闭ROS 2节点。
这段代码展示了如何使用MoveIt和ROS 2进行复杂的运动规划和可视化,包括姿态目标、关节空间目标和路径约束。
#include <pluginlib/class_loader.hpp>
// 插件库加载器
// MoveIt
#include <moveit/robot_model_loader/robot_model_loader.h>
// 机器人模型加载器
#include <moveit/planning_interface/planning_interface.h>
// 规划接口
#include <moveit/planning_scene/planning_scene.h>
// 规划场景
#include <moveit/kinematic_constraints/utils.h>
// 运动学约束工具
#include <moveit_msgs/msg/display_trajectory.hpp>
// 显示轨迹消息
#include <moveit_msgs/msg/planning_scene.h>
// 规划场景消息
#include <moveit_visual_tools/moveit_visual_tools.h>
// MoveIt可视化工具
#include <moveit/move_group_interface/move_group_interface.h>
// MoveIt移动组接口
static const rclcpp::Logger LOGGER = rclcpp::get_logger("motion_planning_api_tutorial");
// 定义日志记录器
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
// 初始化ROS
rclcpp::NodeOptions node_options;
// 定义节点选项
node_options.automatically_declare_parameters_from_overrides(true);
// 自动声明参数
std::shared_ptr<rclcpp::Node> motion_planning_api_tutorial_node =
rclcpp::Node::make_shared("motion_planning_api_tutorial", node_options);
// 创建节点
rclcpp::executors::SingleThreadedExecutor executor;
// 单线程执行器
executor.add_node(motion_planning_api_tutorial_node);
// 添加节点到执行器
std::thread([&executor]() { executor.spin(); }).detach();
// 启动线程执行
// BEGIN_TUTORIAL
// 开始教程
// ^^^^^
// 开始使用规划器的设置非常简单。规划器作为插件在MoveIt中设置,
// 你可以使用ROS的插件库接口加载任何你想使用的规划器。
// 在我们加载规划器之前,我们需要两个对象,一个是RobotModel,另一个是PlanningScene。
// 我们首先实例化一个RobotModelLoader对象,该对象会在ROS参数服务器上查找机器人描述,
// 并为我们构建一个RobotModel以供使用。
const std::string PLANNING_GROUP = "panda_arm";
// 规划组名称
robot_model_loader::RobotModelLoader robot_model_loader(motion_planning_api_tutorial_node, "robot_description");
// 加载机器人模型
const moveit::core::RobotModelPtr& robot_model = robot_model_loader.getModel();
// 获取机器人模型
/* 创建一个RobotState和JointModelGroup来跟踪当前的机器人姿态和规划组 */
moveit::core::RobotStatePtr robot_state(new moveit::core::RobotState(robot_model));
// 创建机器人状态
const moveit::core::JointModelGroup* joint_model_group = robot_state->getJointModelGroup(PLANNING_GROUP);
// 获取关节模型组
// 使用RobotModel,我们可以构建一个PlanningScene,它维护世界的状态(包括机器人)。
planning_scene::PlanningScenePtr planning_scene(new planning_scene::PlanningScene(robot_model));
// 创建规划场景
// 配置一个有效的机器人状态
planning_scene->getCurrentStateNonConst().setToDefaultValues(joint_model_group, "ready");
// 设置默认机器人状态
// 现在我们将构建一个加载器来按名称加载一个规划器。
// 请注意,我们在这里使用的是ROS插件库。
std::unique_ptr<pluginlib::ClassLoader<planning_interface::PlannerManager>> planner_plugin_loader;
// 定义规划器插件加载器
planning_interface::PlannerManagerPtr planner_instance;
// 定义规划器实例
std::vector<std::string> planner_plugin_names;
// 定义规划器插件名称列表
// 我们将从ROS参数服务器获取我们想要加载的规划插件的名称,然后加载规划器,并确保捕获所有异常。
if (!motion_planning_api_tutorial_node->get_parameter("ompl.planning_plugins", planner_plugin_names))
RCLCPP_FATAL(LOGGER, "无法找到规划器插件名称");
// 获取规划器插件名称,若获取失败则打印错误信息
try
{
planner_plugin_loader.reset(new pluginlib::ClassLoader<planning_interface::PlannerManager>(
"moveit_core", "planning_interface::PlannerManager"));
// 尝试创建规划器插件加载器
}
catch (pluginlib::PluginlibException& ex)
{
RCLCPP_FATAL(LOGGER, "创建规划器插件加载器时出现异常 %s", ex.what());
// 若创建失败则打印异常信息
}
if (planner_plugin_names.empty())
{
RCLCPP_ERROR(LOGGER, "未定义任何规划器插件。请确保planning_plugins参数不为空。");
// 若未定义任何规划器插件则打印错误信息
return -1;
}
const auto& planner_name = planner_plugin_names.at(0);
// 获取第一个规划器插件名称
try
{
planner_instance.reset(planner_plugin_loader->createUnmanagedInstance(planner_name));
// 尝试创建规划器实例
if (!planner_instance->initialize(robot_model, motion_planning_api_tutorial_node,
motion_planning_api_tutorial_node->get_namespace()))
RCLCPP_FATAL(LOGGER, "无法初始化规划器实例");
// 若初始化失败则打印错误信息
RCLCPP_INFO(LOGGER, "使用规划接口 '%s'", planner_instance->getDescription().c_str());
// 打印使用的规划接口信息
}
catch (pluginlib::PluginlibException& ex)
{
const std::vector<std::string>& classes = planner_plugin_loader->getDeclaredClasses();
std::stringstream ss;
for (const auto& cls : classes)
ss << cls << " ";
RCLCPP_ERROR(LOGGER, "加载规划器 '%s' 时出现异常: %s\n可用插件: %s", planner_name.c_str(),
ex.what(), ss.str().c_str());
// 若加载规划器失败则打印异常信息以及可用插件列表
}
moveit::planning_interface::MoveGroupInterface move_group(motion_planning_api_tutorial_node, PLANNING_GROUP);
// 初始化移动组接口
// 可视化
// ^^^^^^^^^^^^^
// MoveItVisualTools包提供了许多功能,用于在RViz中可视化物体、机器人和轨迹,
// 以及调试工具,如逐步检查脚本。
namespace rvt = rviz_visual_tools;
moveit_visual_tools::MoveItVisualTools visual_tools(motion_planning_api_tutorial_node, "panda_link0",
"move_group_tutorial", move_group.getRobotModel());
// 初始化MoveIt可视化工具
visual_tools.enableBatchPublishing();
// 启用批量发布
visual_tools.deleteAllMarkers(); // 清除所有旧的标记
visual_tools.trigger();
// 触发批量发布
/* 远程控制是一个检查工具,允许用户通过RViz中的按钮和键盘快捷键逐步执行高级脚本 */
visual_tools.loadRemoteControl();
// 加载远程控制
/* RViz提供了多种类型的标记,在本演示中我们将使用文本、圆柱体和球体 */
Eigen::Isometry3d text_pose = Eigen::Isometry3d::Identity();
text_pose.translation().z() = 1.75;
visual_tools.publishText(text_pose, "Motion Planning API Demo", rvt::WHITE, rvt::XLARGE);
// 发布文本标记
/* 批量发布用于减少发送到RViz的大型可视化的消息数量 */
visual_tools.trigger();
/* 我们还可以使用visual_tools等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'键以开始演示");
// 姿态目标
// ^^^^^^^^^
// 我们现在为Panda机器人的手臂创建一个运动计划请求,
// 指定末端执行器的期望姿态作为输入。
visual_tools.trigger();
planning_interface::MotionPlanRequest req;
// 定义运动计划请求
planning_interface::MotionPlanResponse res;
// 定义运动计划响应
geometry_msgs::msg::PoseStamped pose;
// 定义姿态消息
pose.header.frame_id = "panda_link0";
pose.pose.position.x = 0.3;
pose.pose.position.y = 0.4;
pose.pose.position.z = 0.75;
pose.pose.orientation.w = 1.0;
// 设置末端执行器的期望姿态
// 指定0.01米的位置容差和0.01弧度的角度容差
std::vector<double> tolerance_pose(3, 0.01);
// 设置姿态容差
std::vector<double> tolerance_angle(3, 0.01);
// 设置角度容差
// 我们将使用moveit_core/kinematic_constraints中的辅助函数构建约束请求。
moveit_msgs::msg::Constraints pose_goal =
kinematic_constraints::constructGoalConstraints("panda_link8", pose, tolerance_pose, tolerance_angle);
// 构建姿态目标
req.group_name = PLANNING_GROUP;
req.goal_constraints.push_back(pose_goal);
// 定义工作空间边界
req.workspace_parameters.min_corner.x = req.workspace_parameters.min_corner.y =
req.workspace_parameters.min_corner.z = -5.0;
req.workspace_parameters.max_corner.x = req.workspace_parameters.max_corner.y =
req.workspace_parameters.max_corner.z = 5.0;
// 我们现在构造一个规划上下文,封装场景、请求和响应。
// 我们使用这个规划上下文调用规划器
planning_interface::PlanningContextPtr context =
planner_instance->getPlanningContext(planning_scene, req, res.error_code);
if (!context)
{
RCLCPP_ERROR(LOGGER, "创建规划上下文失败");
return -1;
}
context->solve(res);
if (res.error_code.val != res.error_code.SUCCESS)
{
RCLCPP_ERROR(LOGGER, "无法成功计算规划");
return -1;
}
// 可视化结果
// ^^^^^^^^^^^^^^^^^^^^
std::shared_ptr<rclcpp::Publisher<moveit_msgs::msg::DisplayTrajectory>> display_publisher =
motion_planning_api_tutorial_node->create_publisher<moveit_msgs::msg::DisplayTrajectory>("/display_planned_path",
1);
moveit_msgs::msg::DisplayTrajectory display_trajectory;
/* 可视化轨迹 */
moveit_msgs::msg::MotionPlanResponse response;
res.getMessage(response);
display_trajectory.trajectory_start = response.trajectory_start;
display_trajectory.trajectory.push_back(response.trajectory);
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group);
visual_tools.trigger();
display_publisher->publish(display_trajectory);
/* 将规划场景中的状态设置为上一个规划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions);
planning_scene->setCurrentState(*robot_state.get());
// 显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_1");
visual_tools.publishText(text_pose, "Pose Goal (1)", rvt::WHITE, rvt::XLARGE);
visual_tools.trigger();
/* 我们还可以使用visual_tools等待用户输入 */
visual_tools.prompt("请在RvizVisualToolsGui窗口中按'下一步'以继续演示");
// 关节空间目标
// ^^^^^^^^^^^^^^^^^
// 现在,设置一个关节空间目标
moveit::core::RobotState goal_state(robot_model);
std::vector<double> joint_values = { -1.0, 0.7, 0.7, -1.5, -0.7, 2.0, 0.0 };
goal_state.setJointGroupPositions(joint_model_group, joint_values);
moveit_msgs::msg::Constraints joint_goal =
kinematic_constraints::constructGoalConstraints(goal_state, joint_model_group);
req.goal_constraints.clear();
req.goal_constraints.push_back(joint_goal);
// 调用规划器并可视化轨迹
/* 重新构建规划上下文 */
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code);
/* 调用规划器 */
context->solve(res);
/* 检查规划是否成功 */
if (res.error_code.val != res.error_code.SUCCESS)
{
RCLCPP_ERROR(LOGGER, "无法成功计算规划");
return -1;
}
/* 可视化轨迹 */
res.getMessage(response);
display_trajectory.trajectory.push_back(response.trajectory);
/* 现在你应该看到两个依次规划的轨迹 */
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group);
visual_tools.trigger();
display_publisher->publish(display_trajectory);
/* 我们将添加更多目标。但首先,将规划场景中的状态设置为上一个规划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions);
planning_scene->setCurrentState(*robot_state.get());
// 显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_2");
visual_tools.publishText(text_pose, "Joint Space Goal (2)", rvt::WHITE, rvt::XLARGE);
visual_tools.trigger();
/* 等待用户输入 */
visual_tools.prompt("请在RvizVisualToolsGui窗口中按'下一步'以继续演示");
/* 现在,我们回到第一个目标,以准备进行受方向约束的规划 */
req.goal_constraints.clear();
req.goal_constraints.push_back(pose_goal);
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code);
context->solve(res);
res.getMessage(response);
display_trajectory.trajectory.push_back(response.trajectory);
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group);
visual_tools.trigger();
display_publisher->publish(display_trajectory);
/* 将规划场景中的状态设置为上一个规划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions);
planning_scene->setCurrentState(*robot_state.get());
// 显示目标状态
visual_tools.trigger();
/* 等待用户输入 */
visual_tools.prompt("请在RvizVisualToolsGui窗口中按'下一步'以继续演示");
// 添加路径约束
// ^^^^^^^^^^^^^^^^^^^^^^^
// 让我们再次添加一个新的姿势目标。这次我们还会添加一个路径约束。
/* 让我们创建一个新的姿势目标 */
pose.pose.position.x = 0.32;
pose.pose.position.y = -0.25;
pose.pose.position.z = 0.65;
pose.pose.orientation.w = 1.0;
moveit_msgs::msg::Constraints pose_goal_2 =
kinematic_constraints::constructGoalConstraints("panda_link8", pose, tolerance_pose, tolerance_angle);
/* 现在,让我们尝试移动到这个新的姿势目标 */
req.goal_constraints.clear();
req.goal_constraints.push_back(pose_goal_2);
/* 但是,让我们对运动施加路径约束。
// 在这里,我们要求末端执行器保持水平 */
geometry_msgs::msg::QuaternionStamped quaternion;
quaternion.header.frame_id = "panda_link0";
req.path_constraints = kinematic_constraints::constructGoalConstraints("panda_link8", quaternion);
// 施加路径约束要求规划器在末端执行器的可能位置空间中进行推理
// (机器人的工作空间)
// 因此,我们需要为允许的规划体积指定一个边界;
// 注意:默认边界由WorkspaceBounds请求适配器自动填充(OMPL管道的一部分,
// 但在此示例中未使用)。
// 我们使用一个绝对包括手臂可达空间的边界。这样做没问题,因为在规划手臂时不会在该体积内进行采样;
// 边界仅用于确定采样配置是否有效
req.workspace_parameters.min_corner.x = req.workspace_parameters.min_corner.y =
req.workspace_parameters.min_corner.z = -2.0;
req.workspace_parameters.max_corner.x = req.workspace_parameters.max_corner.y =
req.workspace_parameters.max_corner.z = 2.0;
// 调用规划器并可视化迄今为止创建的所有规划。
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code);
context->solve(res);
res.getMessage(response);
display_trajectory.trajectory.push_back(response.trajectory);
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group);
visual_tools.trigger();
display_publisher->publish(display_trajectory);
/* 将规划场景中的状态设置为上一个规划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions);
planning_scene->setCurrentState(*robot_state.get());
// 显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_3");
visual_tools.publishText(text_pose, "Orientation Constrained Motion Plan (3)", rvt::WHITE, rvt::XLARGE);
visual_tools.trigger();
// 结束教程
/* 等待用户输入 */
visual_tools.prompt("请在RvizVisualToolsGui窗口中按'下一步'以退出演示");
planner_instance.reset();
rclcpp::shutdown();
return 0;
}开始
设置开始使用规划器非常容易。规划器在 MoveIt 中设置为插件,您可以使用 ROS pluginlib 接口加载任何您想使用的规划器。在我们加载规划器之前,我们需要两个对象,一个 RobotModel 和一个 PlanningScene。我们将首先实例化一个 RobotModelLoader 对象,它将在 ROS 参数服务器上查找机器人描述并为我们构建一个 RobotModel
const std::string PLANNING_GROUP = "panda_arm"; // 规划组
robot_model_loader::RobotModelLoader robot_model_loader(motion_planning_api_tutorial_node, "robot_description"); // 机器人模型加载器
const moveit::core::RobotModelPtr& robot_model = robot_model_loader.getModel(); // 获取机器人模型
/* 创建一个RobotState和JointModelGroup来跟踪当前的机器人姿态和规划组 */
moveit::core::RobotStatePtr robot_state(new moveit::core::RobotState(robot_model)); // 创建机器人状态
const moveit::core::JointModelGroup* joint_model_group = robot_state->getJointModelGroup(PLANNING_GROUP); // 获取关节模型组使用 RobotModel,我们可以构建一个保持世界状态(包括机器人)的 PlanningScene。
planning_scene::PlanningScenePtr planning_scene(new planning_scene::PlanningScene(robot_model)); // 创建规划场景配置有效的机器人状态
planning_scene->getCurrentStateNonConst().setToDefaultValues(joint_model_group, "ready"); // 设置默认值我们现在将构建一个加载器来加载一个规划器,按名称。请注意,我们在这里使用的是 ROS pluginlib 库。
std::unique_ptr<pluginlib::ClassLoader<planning_interface::PlannerManager>> planner_plugin_loader; // 规划器插件加载器
planning_interface::PlannerManagerPtr planner_instance; // 规划器实例
std::vector<std::string> planner_plugin_names; // 规划器插件名称列表我们将从 ROS 参数服务器获取要加载的规划插件的名称,然后加载规划器,确保捕获所有异常。
if (!motion_planning_api_tutorial_node->get_parameter("ompl.planning_plugins", planner_plugin_names))
RCLCPP_FATAL(LOGGER, "无法找到规划器插件名称"); // 获取规划器插件名称失败
try
{
planner_plugin_loader.reset(new pluginlib::ClassLoader<planning_interface::PlannerManager>(
"moveit_core", "planning_interface::PlannerManager")); // 重置规划器插件加载器
}
catch (pluginlib::PluginlibException& ex)
{
RCLCPP_FATAL(LOGGER, "创建规划插件加载器时发生异常 %s", ex.what()); // 创建规划插件加载器时发生异常
}
if (planner_plugin_names.empty())
{
RCLCPP_ERROR(LOGGER,
"未定义任何规划器插件。请确保planning_plugins参数不为空。"); // 未定义任何规划器插件
return -1;
}
const auto& planner_name = planner_plugin_names.at(0); // 获取第一个规划器插件名称
try
{
planner_instance.reset(planner_plugin_loader->createUnmanagedInstance(planner_name)); // 创建未管理的规划器实例
if (!planner_instance->initialize(robot_model, motion_planning_api_tutorial_node,
motion_planning_api_tutorial_node->get_namespace()))
RCLCPP_FATAL(LOGGER, "无法初始化规划器实例"); // 初始化规划器实例失败
RCLCPP_INFO(LOGGER, "使用规划接口 '%s'", planner_instance->getDescription().c_str()); // 使用规划接口
}
catch (pluginlib::PluginlibException& ex)
{
const std::vector<std::string>& classes = planner_plugin_loader->getDeclaredClasses(); // 获取声明的类
std::stringstream ss;
for (const auto& cls : classes)
ss << cls << " ";
RCLCPP_ERROR(LOGGER, "加载规划器 '%s' 时发生异常: %s\n可用插件: %s", planner_name.c_str(),
ex.what(), ss.str().c_str()); // 加载规划器时发生异常
}
moveit::planning_interface::MoveGroupInterface move_group(motion_planning_api_tutorial_node, PLANNING_GROUP); // Move组接口可视化
该软件包 MoveItVisualTools 提供了许多在 RViz 中可视化对象、机器人和轨迹的功能,以及诸如脚本逐步内省等调试工具。
namespace rvt = rviz_visual_tools; // rviz可视化工具命名空间
moveit_visual_tools::MoveItVisualTools visual_tools(motion_planning_api_tutorial_node, "panda_link0",
"move_group_tutorial", move_group.getRobotModel()); // MoveIt可视化工具
visual_tools.enableBatchPublishing(); // 启用批量发布
visual_tools.deleteAllMarkers(); // 清除所有旧标记
visual_tools.trigger(); // 触发可视化工具
/* 远程控制是一个检查工具,允许用户通过RViz中的按钮和键盘快捷键逐步执行高级脚本 */
visual_tools.loadRemoteControl(); // 加载远程控制
/* RViz提供了多种类型的标记,在本演示中我们将使用文本、圆柱体和球体 */
Eigen::Isometry3d text_pose = Eigen::Isometry3d::Identity(); // 文本姿态
text_pose.translation().z() = 1.75; // 设置文本位置
visual_tools.publishText(text_pose, "运动规划API演示", rvt::WHITE, rvt::XLARGE); // 发布文本
/* 批量发布用于减少发送到RViz的大型可视化的消息数量 */
visual_tools.trigger(); // 触发可视化工具
/* 我们还可以使用visual_tools等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'开始演示"); // 提示用户输入姿势目标
我们现在将为 Panda 的手臂创建一个运动规划请求,指定末端执行器的期望姿态作为输入。
visual_tools.trigger(); // 触发可视化工具
planning_interface::MotionPlanRequest req; // 运动计划请求
planning_interface::MotionPlanResponse res; // 运动计划响应
geometry_msgs::msg::PoseStamped pose; // 姿态消息
pose.header.frame_id = "panda_link0"; // 设置帧ID
pose.pose.position.x = 0.3; // 设置位置x
pose.pose.position.y = 0.4; // 设置位置y
pose.pose.position.z = 0.75; // 设置位置z
pose.pose.orientation.w = 1.0; // 设置方向w位置公差为 0.01 米,方向公差为 0.01 弧度。
std::vector<double> tolerance_pose(3, 0.01); // 位置公差
std::vector<double> tolerance_angle(3, 0.01); // 角度公差我们将使用 kinematic_constraints 包中可用的辅助函数将请求创建为约束。
moveit_msgs::msg::Constraints pose_goal =
kinematic_constraints::constructGoalConstraints("panda_link8", pose, tolerance_pose, tolerance_angle); // 构建目标约束
req.group_name = PLANNING_GROUP; // 设置规划组名称
req.goal_constraints.push_back(pose_goal); // 添加目标约束定义工作区边界
req.workspace_parameters.min_corner.x = req.workspace_parameters.min_corner.y =
req.workspace_parameters.min_corner.z = -5.0; // 设置最小角点
req.workspace_parameters.max_corner.x = req.workspace_parameters.max_corner.y =
req.workspace_parameters.max_corner.z = 5.0; // 设置最大角点我们现在构建一个规划上下文,封装场景、请求和响应。我们使用这个规划上下文调用规划器。
planning_interface::PlanningContextPtr context =
planner_instance->getPlanningContext(planning_scene, req, res.error_code); // 获取规划上下文
if (!context)
{
RCLCPP_ERROR(LOGGER, "创建规划上下文失败"); // 创建规划上下文失败
return -1;
}
context->solve(res); // 解决规划问题
if (res.error_code.val != res.error_code.SUCCESS)
{
RCLCPP_ERROR(LOGGER, "无法成功计算规划"); // 计算规划失败
return -1;
}可视化结果
std::shared_ptr<rclcpp::Publisher<moveit_msgs::msg::DisplayTrajectory>> display_publisher =
motion_planning_api_tutorial_node->create_publisher<moveit_msgs::msg::DisplayTrajectory>("/display_planned_path",
1); // 创建显示轨迹的发布者
moveit_msgs::msg::DisplayTrajectory display_trajectory; // 显示轨迹消息
/* 可视化轨迹 */
moveit_msgs::msg::MotionPlanResponse response; // 运动计划响应
res.getMessage(response); // 获取响应消息
display_trajectory.trajectory_start = response.trajectory_start; // 设置轨迹起点
display_trajectory.trajectory.push_back(response.trajectory); // 添加轨迹
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group); // 发布轨迹线
visual_tools.trigger(); // 触发可视化工具
display_publisher->publish(display_trajectory); // 发布显示轨迹
/* 将规划场景中的状态设置为最后一个计划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions); // 设置关节组位置
planning_scene->setCurrentState(*robot_state.get()); // 设置当前状态显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_1"); // 发布标记轴
visual_tools.publishText(text_pose, "姿态目标 (1)", rvt::WHITE, rvt::XLARGE); // 发布文本
visual_tools.trigger(); // 触发可视化工具
/* 我们还可以使用visual_tools等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'继续演示"); // 提示用户输入关节空间目标
现在,设定一个关节空间目标
moveit::core::RobotState goal_state(robot_model); // 创建机器人状态
std::vector<double> joint_values = { -1.0, 0.7, 0.7, -1.5, -0.7, 2.0, 0.0 }; // 设置关节值
goal_state.setJointGroupPositions(joint_model_group, joint_values); // 设置关节组位置
moveit_msgs::msg::Constraints joint_goal =
kinematic_constraints::constructGoalConstraints(goal_state, joint_model_group); // 构建关节目标约束
req.goal_constraints.clear(); // 清除目标约束
req.goal_constraints.push_back(joint_goal); // 添加关节目标约束调用规划器并可视化轨迹
/* 重新构建规划上下文 */
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code); // 获取规划上下文
/* 调用规划器 */
context->solve(res); // 解决规划问题
/* 检查规划是否成功 */
if (res.error_code.val != res.error_code.SUCCESS)
{
RCLCPP_ERROR(LOGGER, "无法成功计算规划"); // 计算规划失败
return -1;
}
/* 可视化轨迹 */
res.getMessage(response); // 获取响应消息
display_trajectory.trajectory.push_back(response.trajectory); // 添加轨迹
/* 现在你应该看到两个连续的规划轨迹 */
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group); // 发布轨迹线
visual_tools.trigger(); // 触发可视化工具
display_publisher->publish(display_trajectory); // 发布显示轨迹
/* 我们将添加更多目标。但首先,将规划场景中的状态设置为最后一个计划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions); // 设置关节组位置
planning_scene->setCurrentState(*robot_state.get()); // 设置当前状态显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_2"); // 发布标记轴
visual_tools.publishText(text_pose, "关节空间目标 (2)", rvt::WHITE, rvt::XLARGE); // 发布文本
visual_tools.trigger(); // 触发可视化工具
/* 等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'继续演示"); // 提示用户输入
/* 现在,我们回到第一个目标,为方向约束规划做准备 */
req.goal_constraints.clear(); // 清除目标约束
req.goal_constraints.push_back(pose_goal); // 添加姿态目标约束
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code); // 获取规划上下文
context->solve(res); // 解决规划问题
res.getMessage(response); // 获取响应消息
display_trajectory.trajectory.push_back(response.trajectory); // 添加轨迹
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group); // 发布轨迹线
visual_tools.trigger(); // 触发可视化工具
display_publisher->publish(display_trajectory); // 发布显示轨迹
/* 将规划场景中的状态设置为最后一个计划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions); // 设置关节组位置
planning_scene->setCurrentState(*robot_state.get()); // 设置当前状态显示目标状态
// 显示目标状态
visual_tools.trigger(); // 触发可视化工具
/* 等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'继续演示"); // 提示用户输入添加路径约束
让我们再次添加一个新的姿势目标。这次我们还将为运动添加路径约束。
pose.pose.position.x = 0.32; // 设置位置x
pose.pose.position.y = -0.25; // 设置位置y
pose.pose.position.z = 0.65; // 设置位置z
pose.pose.orientation.w = 1.0; // 设置方向w
moveit_msgs::msg::Constraints pose_goal_2 =
kinematic_constraints::constructGoalConstraints("panda_link8", pose, tolerance_pose, tolerance_angle); // 构建姿态目标约束
/* 现在,让我们尝试移动到这个新的姿态目标 */
req.goal_constraints.clear(); // 清除目标约束
req.goal_constraints.push_back(pose_goal_2); // 添加姿态目标约束
/* 但是,让我们对运动施加路径约束。
在这里,我们要求末端执行器保持水平 */
geometry_msgs::msg::QuaternionStamped quaternion; // 四元数消息
quaternion.header.frame_id = "panda_link0"; // 设置帧ID
req.path_constraints = kinematic_constraints::constructGoalConstraints("panda_link8", quaternion); // 构建路径约束施加路径约束要求规划器在末端执行器可能的位置空间(机器人工作空间)中进行推理,因此,我们还需要为允许的规划体积指定一个边界;注意:默认边界由 WorkspaceBounds 请求适配器自动填充(OMPL 管道的一部分,但在此示例中未使用)。我们使用的边界肯定包括手臂的可达空间。这是可以的,因为在为手臂规划时不会在此体积中进行采样;边界仅用于确定采样的配置是否有效。
req.workspace_parameters.min_corner.x = req.workspace_parameters.min_corner.y =
req.workspace_parameters.min_corner.z = -2.0; // 设置最小角点
req.workspace_parameters.max_corner.x = req.workspace_parameters.max_corner.y =
req.workspace_parameters.max_corner.z = 2.0// 设置最大角点调用规划器并可视化到目前为止创建的所有规划。
context = planner_instance->getPlanningContext(planning_scene, req, res.error_code); // 获取规划上下文
context->solve(res); // 解决规划问题
res.getMessage(response); // 获取响应消息
display_trajectory.trajectory.push_back(response.trajectory); // 添加轨迹
visual_tools.publishTrajectoryLine(display_trajectory.trajectory.back(), joint_model_group); // 发布轨迹线
visual_tools.trigger(); // 触发可视化工具
display_publisher->publish(display_trajectory); // 发布显示轨迹
/* 将规划场景中的状态设置为最后一个计划的最终状态 */
robot_state->setJointGroupPositions(joint_model_group, response.trajectory.joint_trajectory.points.back().positions); // 设置关节组位置
planning_scene->setCurrentState(*robot_state.get()); // 设置当前状态显示目标状态
visual_tools.publishAxisLabeled(pose.pose, "goal_3"); // 发布标记轴
visual_tools.publishText(text_pose, "姿态目标 (3)", rvt::WHITE, rvt::XLARGE); // 发布文本
visual_tools.trigger(); // 触发可视化工具
/* 等待用户输入 */
visual_tools.prompt("在RvizVisualToolsGui窗口中按'next'继续演示"); // 提示用户输入启动文件
整个启动文件在 GitHub 上。本教程中的所有代码都可以从 moveit_tutorials 包中编译和运行。https://github.com/moveit/moveit2_tutorials/blob/main/doc/examples/motion_planning_api/launch/motion_planning_api_tutorial.launch.py
from launch import LaunchDescription # 从launch模块导入LaunchDescription类
from launch_ros.actions import Node # 从launch_ros.actions模块导入Node类
from moveit_configs_utils import MoveItConfigsBuilder # 从moveit_configs_utils模块导入MoveItConfigsBuilder类
def generate_launch_description(): # 定义generate_launch_description函数
moveit_config = ( # 创建moveit_config对象
MoveItConfigsBuilder("moveit_resources_panda") # 使用MoveItConfigsBuilder类构建配置
.robot_description(file_path="config/panda.urdf.xacro") # 设置机器人描述文件路径
.robot_description_semantic(file_path="config/panda.srdf") # 设置机器人语义描述文件路径
.trajectory_execution(file_path="config/moveit_controllers.yaml") # 设置轨迹执行配置文件路径
.planning_pipelines(pipelines=["ompl"]) # 设置规划管道
.to_moveit_configs() # 转换为MoveIt配置
)
return LaunchDescription( # 返回LaunchDescription对象
[
Node( # 创建Node对象
package="moveit2_tutorials", # 设置包名为moveit2_tutorials
executable="motion_planning_api_tutorial", # 设置可执行文件名为motion_planning_api_tutorial
name="motion_planning_api_tutorial", # 设置节点名为motion_planning_api_tutorial
output="screen", # 设置输出为屏幕
parameters=[moveit_config.to_dict()], # 设置参数为moveit_config的字典表示
)
]
)
















 566
566

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









