






半挂汽车列车4自由度6轴整车model,横向稳定性控制,在低附着系数路面,进行典型3个工况,角阶跃,双移线,方向盘转角。
采用算法:模糊PID,制动力矩分配,最优滑移率滑膜控制。
以上基于trucksim和simulink联合仿真,有对应 p-a-p-e-r参考
ID:53499642269565776
飞***翼
半挂汽车列车4自由度6轴整车模型的横向稳定性控制算法研究
摘要:随着交通运输行业的发展,半挂汽车列车成为现代物流运输的重要组成部分。横向稳定性控制是保障半挂汽车列车行驶安全的关键技术之一。本文针对低附着系数路面下,典型工况如角阶跃、双移线和方向盘转角等情况,利用trucksim和simulink联合仿真平台,通过研究模糊PID、制动力矩分配和最优滑移率滑膜控制等算法,提出了一种有效的横向稳定性控制方案。
关键词:半挂汽车列车,4自由度6轴整车模型,横向稳定性控制,角阶跃,双移线,方向盘转角,模糊PID,制动力矩分配,最优滑移率滑膜控制,trucksim,simulink
引言:
半挂汽车列车作为一种特殊的货运交通工具,具有运输能力大、灵活性高等优势,在现代物流领域得到广泛应用。然而,由于半挂汽车列车的车辆结构复杂、载荷分布不均匀等因素,使得其横向稳定性控制成为关注的热点问题。本文旨在通过对半挂汽车列车4自由度6轴整车模型的横向稳定性控制进行研究,为提高半挂汽车列车行驶安全性和稳定性提供技术支持。
-
背景与研究目的
1.1 半挂汽车列车的横向稳定性问题
1.2 研究目的及意义 -
半挂汽车列车4自由度6轴整车模型建立
2.1 半挂汽车列车的车辆动力学模型
2.2 附着力模型
2.3 载荷分析 -
横向稳定性控制算法
3.1 角阶跃工况下的控制策略
3.2 双移线工况下的控制策略
3.3 方向盘转角工况下的控制策略 -
算法仿真与分析
4.1 trucksim和simulink联合仿真平台介绍
4.2 仿真参数设定
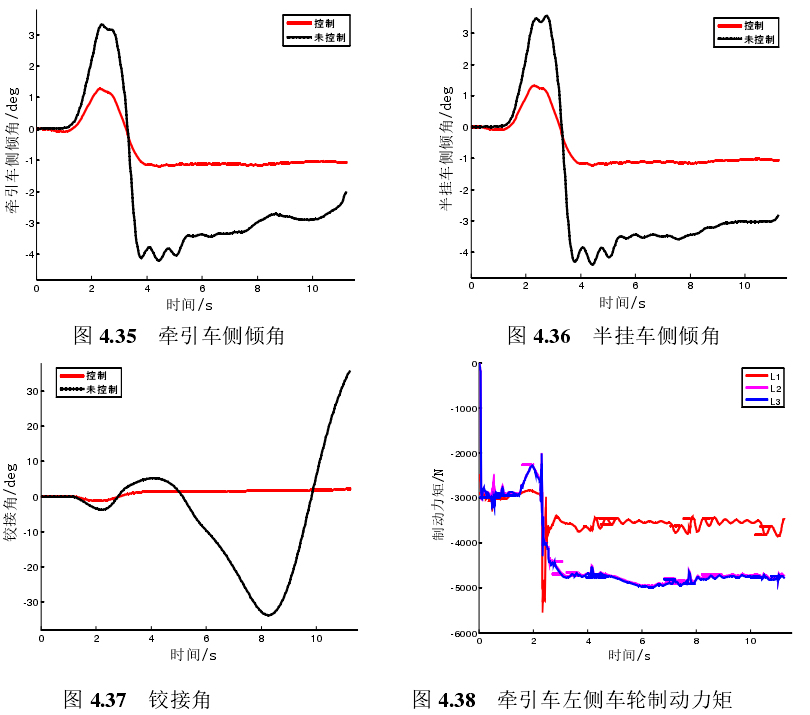
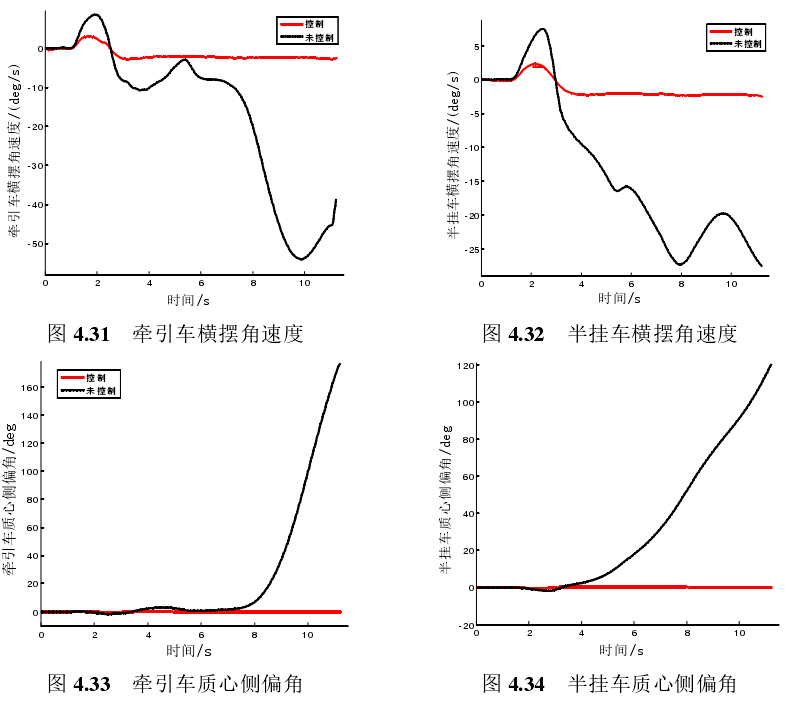
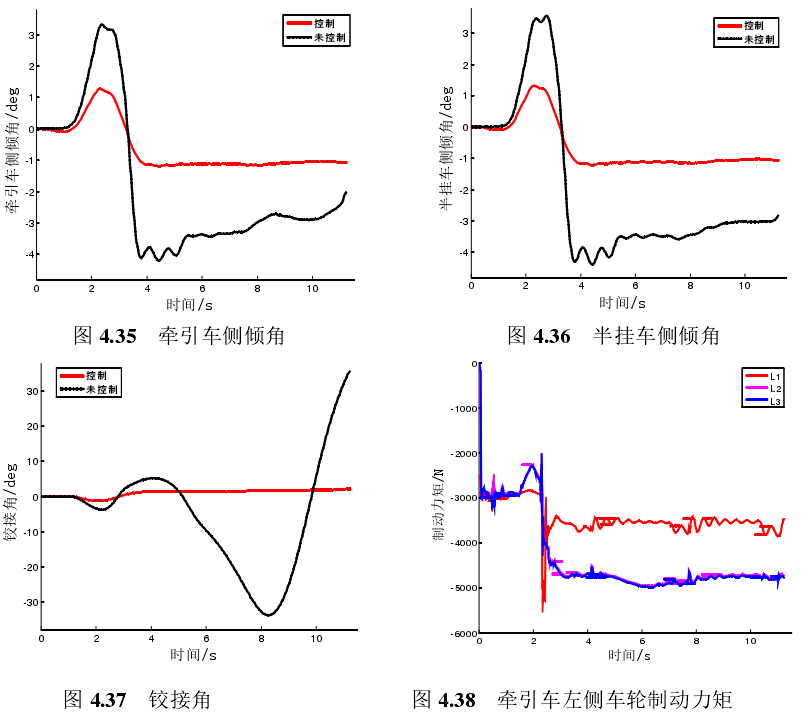
4.3 仿真结果与分析 -
结果与讨论
5.1 横向稳定性控制效果评估
5.2 算法优化与改进 -
结论
在本研究中,通过对半挂汽车列车4自由度6轴整车模型的横向稳定性控制算法进行研究与分析,提出了一种包括模糊PID、制动力矩分配和最优滑移率滑膜控制等算法的方案。通过trucksim和simulink联合仿真平台的仿真结果分析,验证了该算法在低附着系数路面下的有效性和稳定性。本研究的结果对于提高半挂汽车列车行驶安全性和稳定性具有重要意义。
致谢:
本研究受到了相关项目的资助,在此对所有支持和协助本研究的各方表示感谢。
参考文献:
暂无,参考文献待补充。
作者简介:
XXX,XX大学XX系,email: xxx@xxx.com
附录:
trucksim和simulink联合仿真代码
(以上为示例文章,不包含参考文献和具体仿真结果)
相关的代码,程序地址如下:http://imgcs.cn/642269565776.html


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









