







 本文深入解析了ROS中的Costmap概念,介绍了其在机器人导航避障中的关键作用。通过gmapping生成的基础地图不足以应对动态障碍物,因此引入了costmap_2d软件包,创建local_costmap和global_costmap,确保路径规划的安全性。文章详细阐述了StaticMapLayer、ObstacleMapLayer和InflationLayer等图层的工作原理,并解释了如何通过调整参数优化costmap的表现。
本文深入解析了ROS中的Costmap概念,介绍了其在机器人导航避障中的关键作用。通过gmapping生成的基础地图不足以应对动态障碍物,因此引入了costmap_2d软件包,创建local_costmap和global_costmap,确保路径规划的安全性。文章详细阐述了StaticMapLayer、ObstacleMapLayer和InflationLayer等图层的工作原理,并解释了如何通过调整参数优化costmap的表现。
Costmap 代价地图设计理论
使用gmapping 构建的地图为全局静态地图,要实现导航避障功能,单靠这一张地图是不够安全的,例如在导航过程中突然出现的障碍物(动态障碍物),因此需要对这张地图进行各种加工修饰,使导航避障更安全,而这功能在ROS中是由costmap_2d软件包实现的,该软件包在原始地图上实现了两张新的地图。一个是 local_costmap,另外一个就是global_costmap,两张costmap一个是为局部路径规划准备的,一个是为全局路径规划准备的。无论是local_costmap还是global_costmap,都可以配置多个图层,包括下面几种:
Static Map Layer:静态地图层,基本上不变的地图层,通常都是SLAM建立完成的静态地图。
Obstacle Map Layer:障碍地图层,用于动态的记录传感器感知到的障碍物信息。
Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的撞上障碍物。
Other Layers:你还可以通过插件的形式自己实现costmap,目前已有Social Costmap Layer、Range Sensor Layer等开源插件。
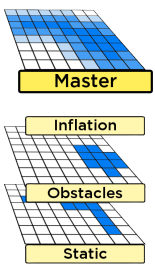
图 4-15 costmap图层
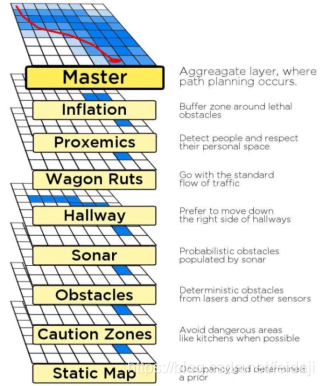
图costmap的分层(左图默认分层结构,右图为人为分层结构示例)
costmap由多个层共同组成,将不同功能放置在不同层中。如图8-2(左)所示,Static_Layer(静态地图层,即原始地图)是第一层;Obstacle_Layer(障碍物层,即原始地图中没有的动态障碍物)是第二层;Inflation_Layer(膨胀层,即将前述所有层所有障碍物都膨胀一定大小)是第三层。这三层组合成了master map(最终的costmap),供给路线规划模块使用。其他层可以通过pluginlib在costmap中实现和使用
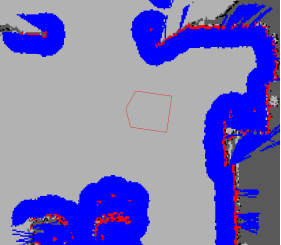
图 4-16 costmap障碍物膨胀图
二维costmap地图示例如图上所示。红色单元表示代价地图中的障碍物,蓝色单元表示由机器人内切半径来计算膨胀的障碍物,红色多边形表示机器人的垂直投影(footprint),浅灰色代表已知且未被占用的区域,深灰色代表未知区域。为了避免机器人与障碍碰撞,机器人的垂直投影(footprint)不能与红色单元相交,机器人的中心不能穿过蓝色单元
Costmap 地图又叫占用栅格图,即将整张地图分成多个小栅格(默认每个小栅格是边长为0.05m的正方型),每个栅格又分为三种情况: Occupied被占用(有障碍)、Free自由区域(无障碍)、Unknown Space未知区域,划分规则如下图所示:
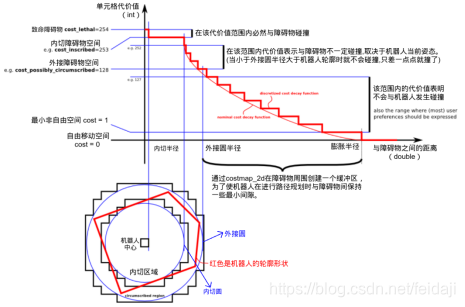
图 4-17 costmap 代价计算说明图
其中规划行走路径时,被占用和未知区域是不允许行走的,而Free自由区域中的每个小栅格,会根据离障碍物的远近,计算出一个代价值,最终用于路径规划,计算公式如下
exp(-1.0 * cost_scaling_factor * (distance_from_obstacle – inscribed_radius)) * (costmap_2d::INSCRIBED_INFLATED_OBSTACLE – 1)
cost_scaling_factor 是膨胀的比例系数,默认配置为10.0, 越大表明指数曲线下降越快
代价地图中到实际障碍物距离在内切圆半径到膨胀半径之间的所有cell可以使用如下公式来计算膨胀代价

















 7381
7381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









