






2.1启动第一个ROS例程——小海龟仿真,验证ROS是否安装成功
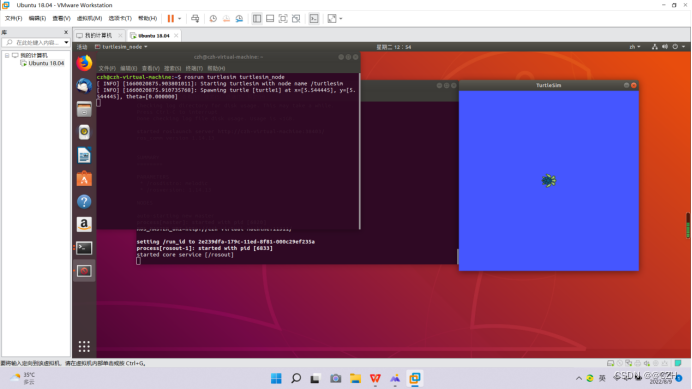
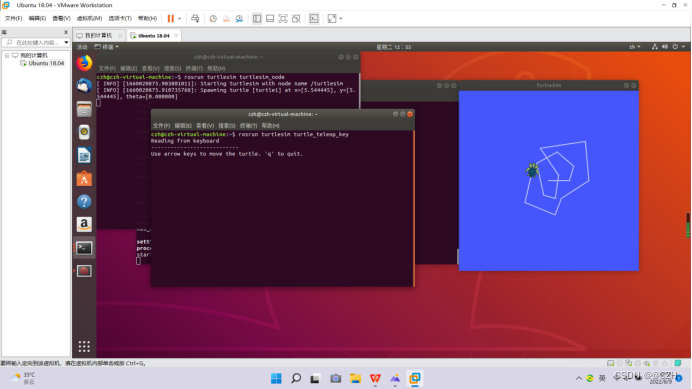
打开终端输入命令“roscore”启动ROS Master节点管理器,如果ROS安装成功,在终端中显示如图所示信息,打开一个新终端,输入命令“rosrun turtlesim turtlesim”启动turtlesim小海龟仿真器,会出现如图小海龟可视化仿真界面,再次打开一个新终端,输入命令“rosrun turtlesim turtle_teleop_key”运行键盘控制节点,此时便可通过键盘方向键控制仿真界面中小海龟的移动 。
2.2 创建工作空间
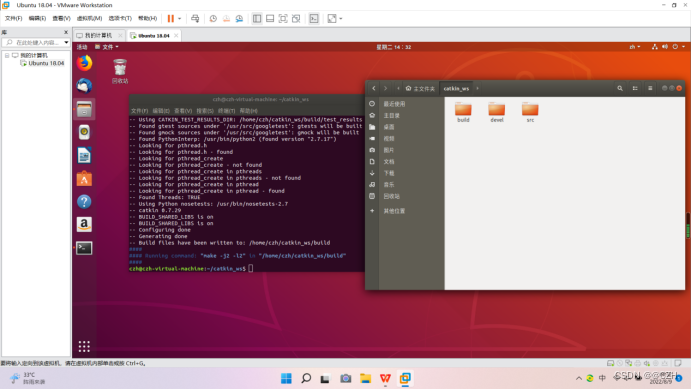
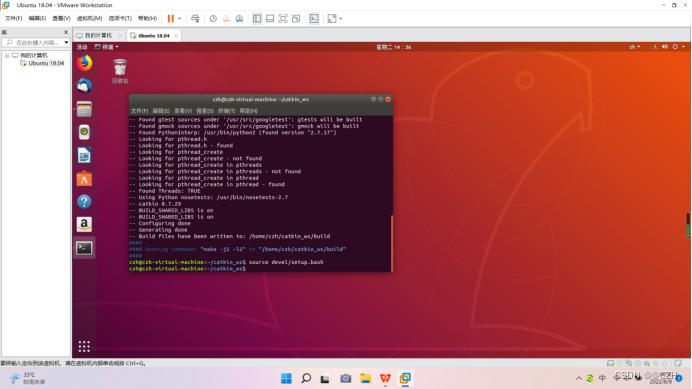
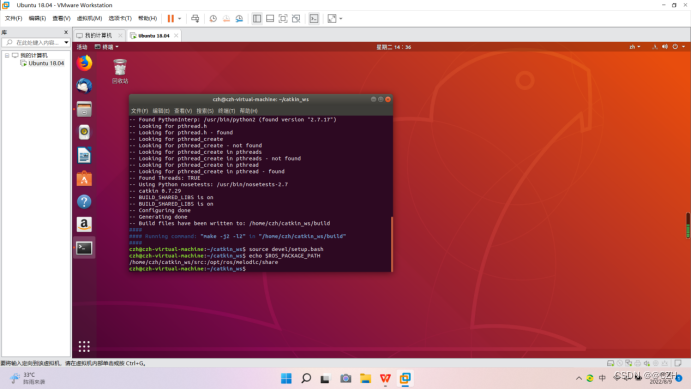
工作空间(workspace)是一个存放工程开发相关文件的文件夹,一般包括以下四个目录空间:src代码空间,build编译空间,devel开发空间,install安装空间。首先使用命令创建工作空间目录“mkdir ~p ~/catkin_ws/src”,然后运行ROS工作空间初始化命令“cd ~/catkin_ws/src”“catkin_init_workspace”完成创建。在工作空间根目录下编译整个工作空间“cd ~/catkin_ws/”“catkin_make”,编译完成后会在工作空间根目录下会自动产生build和devel两个文件夹及其中文件。使用source命令运行devel中脚本文件“source devel/setup.bash”使工作空间中的环境变量生效。为确保环境变量已经生效,使用命令“echo $ROS_PACKAGE_PATH”进行检查,如果打印路径中如图已经包含当前工作空间的路径,则说明环境变量设置成功。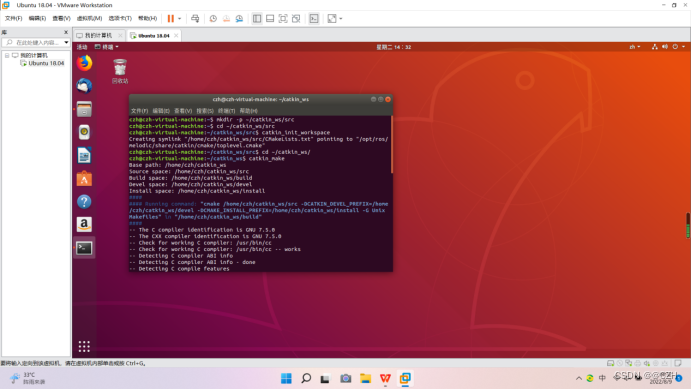
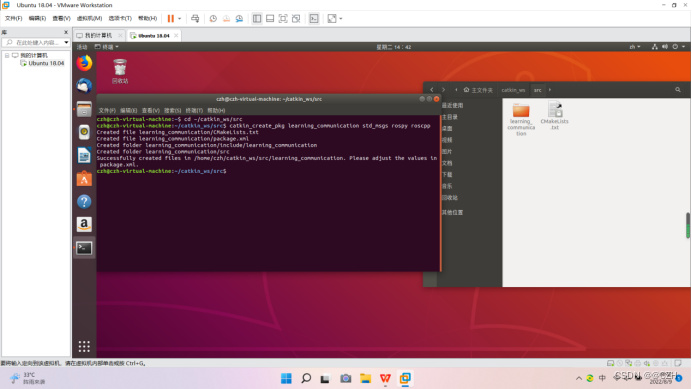
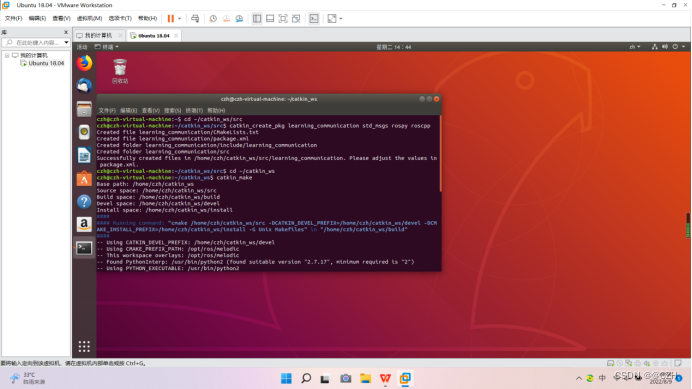
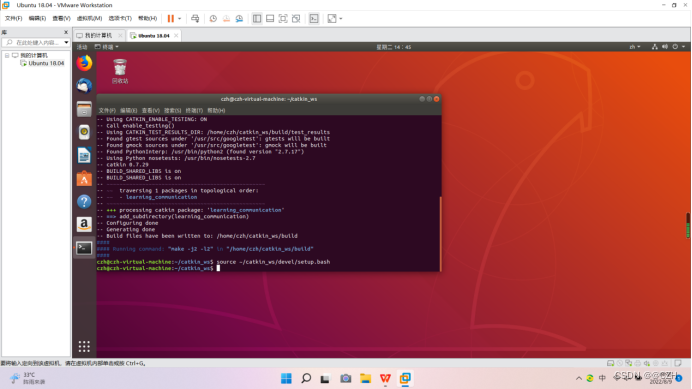
创建功能包,进入工作空间下的代码空间“cd ~/catkin_ws/scr”,使用创建功能包的命令“catkin_creat_pkg <package_name> [depend1] [depend2] [depend3]”创建功能包,例如创建learning_communication功能包“catkin_creat_pkg learning_communication std_msgs rospy roscpp”,创建完成scr中生成如图功能包,其中包含两份文件,回到工作空间根目录下进行编译“cd ~/catkin_ws”“catkin_make”,设置环境变量“source ~/catkin_ws/devel/setup.bash”。















 853
853











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









