









 本文介绍如何使用Meshlab软件将点云数据转换成三维模型,并通过Blender预览,最后利用Assimp库在Vs2010环境中加载该模型。
本文介绍如何使用Meshlab软件将点云数据转换成三维模型,并通过Blender预览,最后利用Assimp库在Vs2010环境中加载该模型。
使用Meshlab软件将点云(Point Cloud)转换为模型(Mesh)
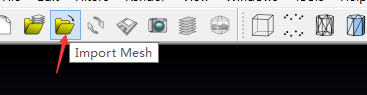
启动Meshlab软件:

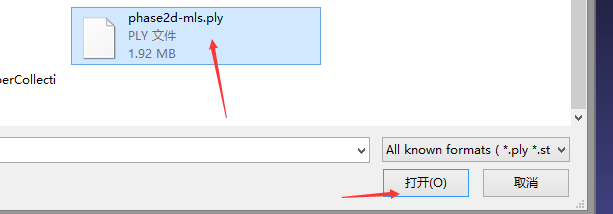
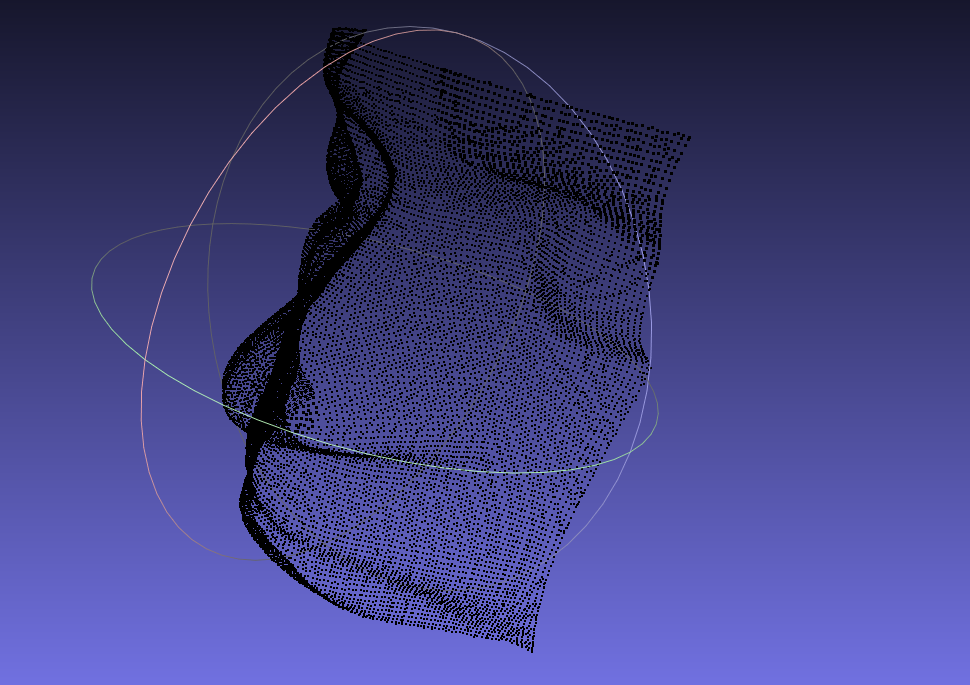
导入.ply点云文件:
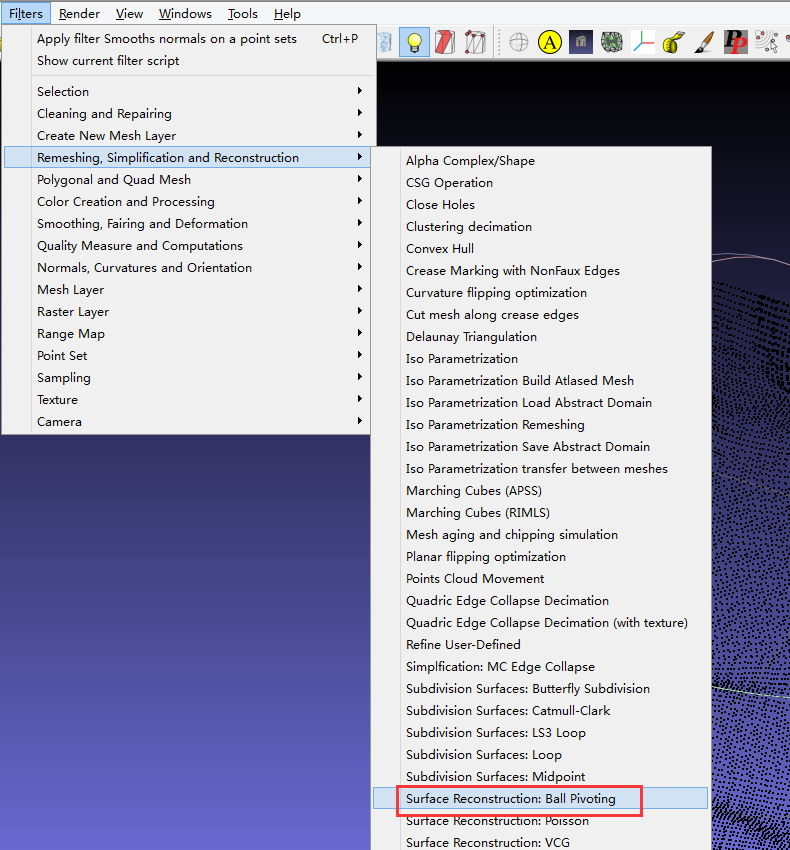
接着点击:
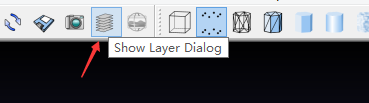
弹出一个右侧边栏:
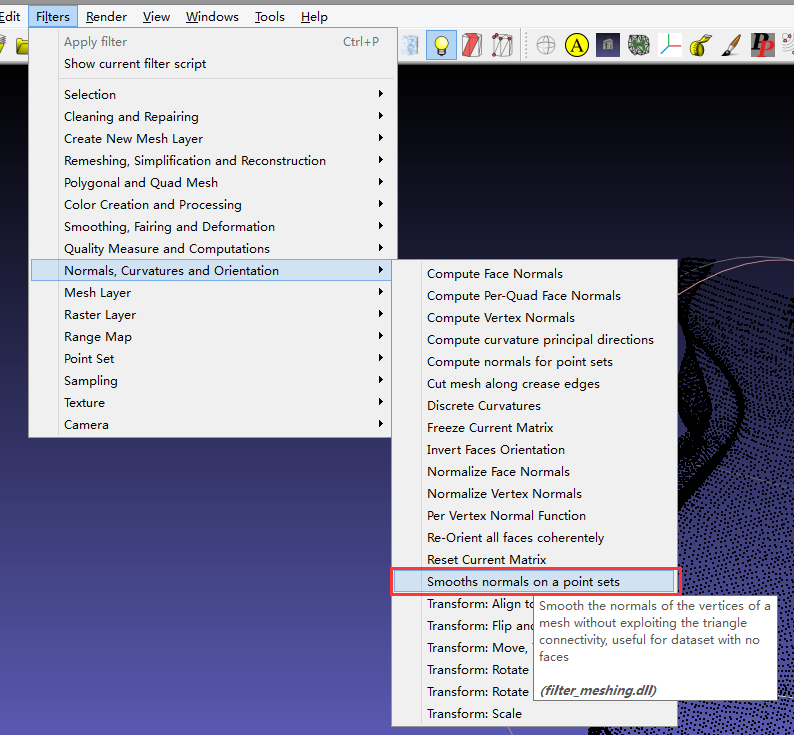
接着,计算每个点的法线:
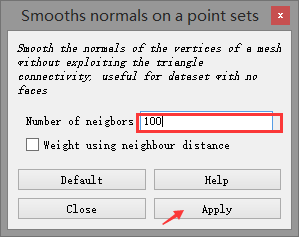
输入100,点击Apply,运行完成,点击Close
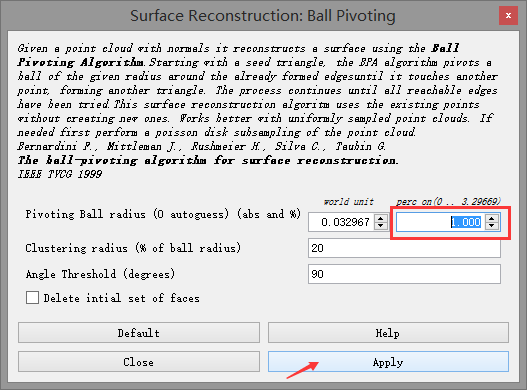
现在,进行曲面重建:
不用管第一个文本框,第2个文本框里面,调为1.0。点击Apply,运行之后点击Close,关闭这个对话框。
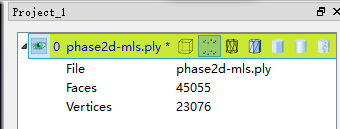
现在你可以看到,右边栏中的Faces项的值已经不是0了:
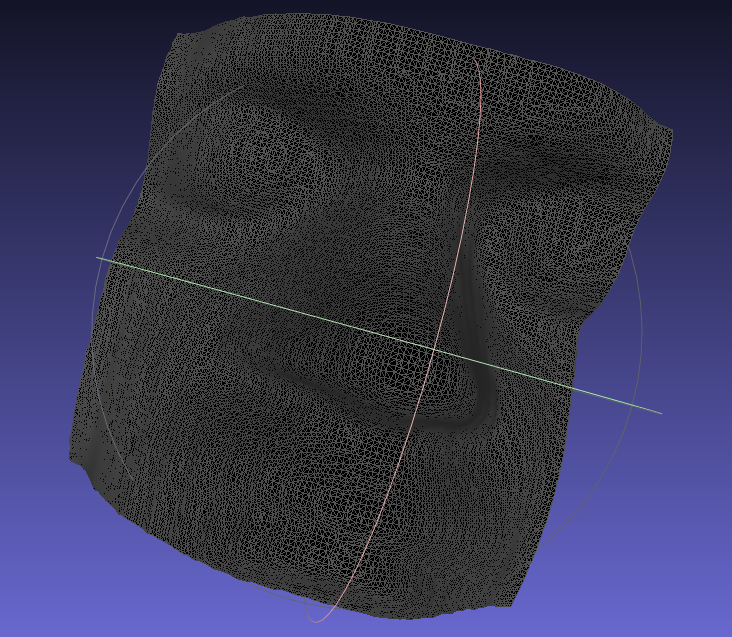
但是现在还没有出现效果。怎样做能看到曲面重建后的模型的效果呢:
点击这里:

搞定:
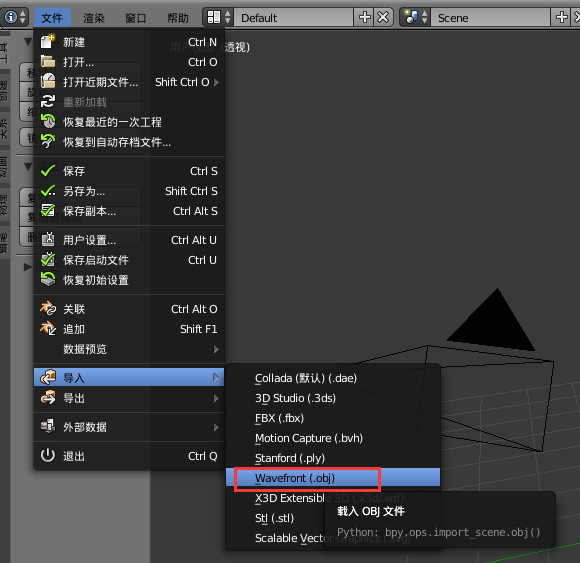
现在,将模型导出,导出为.obj文件:
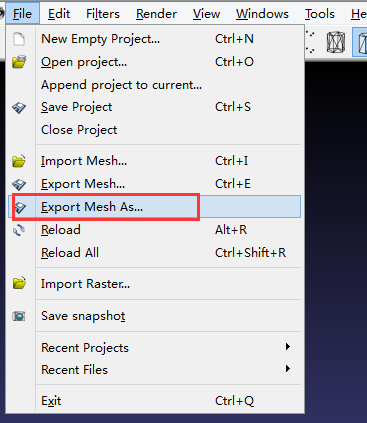
选择.obj文件格式:
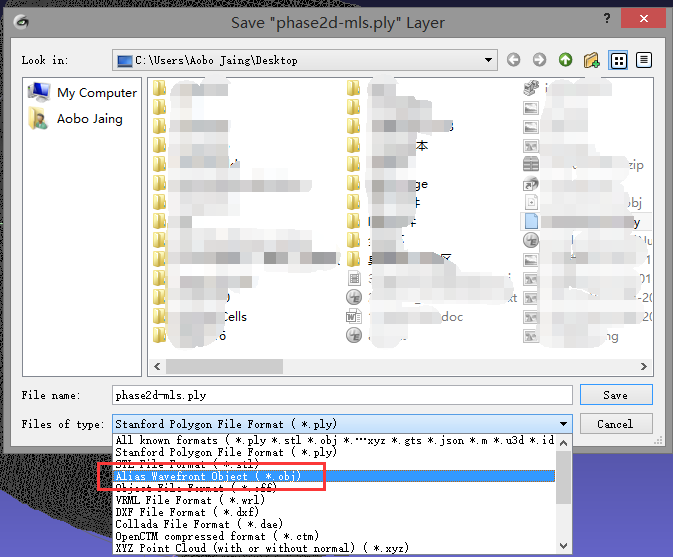
Ok,搞定。
现在我们使用Blender软件将这个刚刚生成的模型打开,看看效果:
启动Blender:
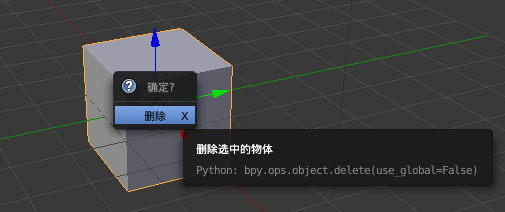
每次新启动Blender,场景中总是自动出现一个立方体和一个灯光和一个摄像机,我们先选中立方体,再按X键,将它删除,因为它在中央,太害事了:
接着导入刚刚创建的.obj文件:
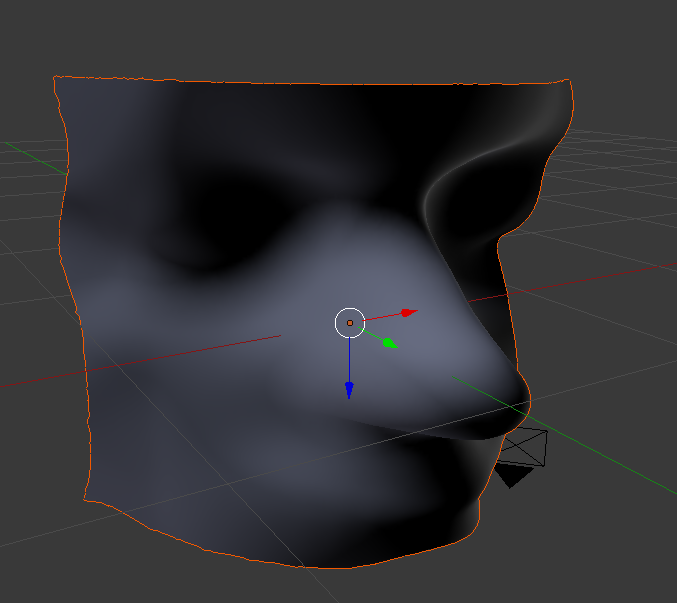
可以,效果是可以的。搞定。
那么接下来,第5步,在Vs2010开发环境,使用Assimp开源模型导入库,将这个.obj模型文件加载到程序里面。

















 1232
1232

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









