







安装
切换到foxy分支
按照教程来安装
安装依赖
安装依赖这步,缺少了pcl-ros的安装
rosdep install -y --ignore-src --from-paths src
手动去下载pcl-rosfoxy分支下载
将pcl-ros部分放到~/gridmap_dep/src目录下
如下图
接着按照剩下的流程走完即可
报错
问题一:
执行编译与安装报错
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
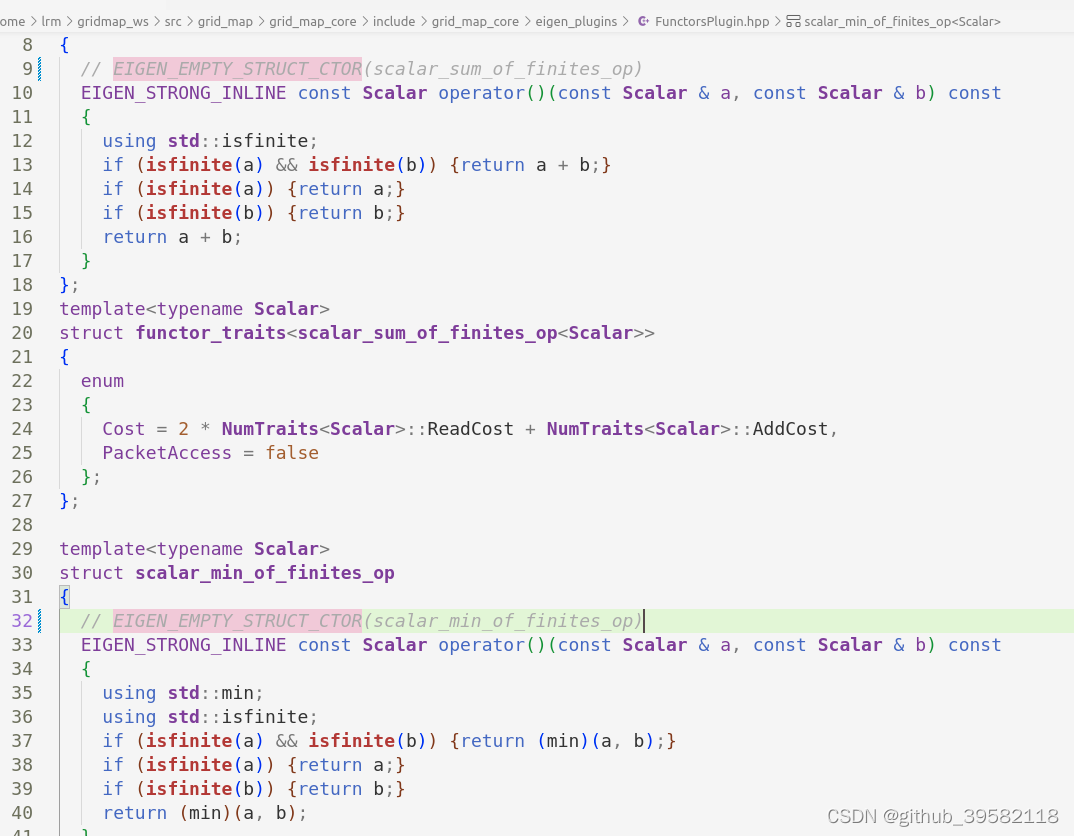
/home/lrm/gridmap_ws/src/grid_map/grid_map_core/include/grid_map_core/eigen_plugins/FunctorsPlugin.hpp:32:51: error: expected ‘;’ at end of member declaration
解决
查看了下Eigen最新提交记录,EIGEN_EMPTY_STRUCT_CTOR 被删除了
注释即可














 3459
3459











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









