






 本文详细介绍了如何在Ubuntu 18.04和ROS Melodic环境下编译安装Grid Map库,包括安装依赖、解决编译错误以及运行多个示例,如simple_demo、filters_demo等,适用于机器人导航和自主驾驶领域的栅格地图应用。
本文详细介绍了如何在Ubuntu 18.04和ROS Melodic环境下编译安装Grid Map库,包括安装依赖、解决编译错误以及运行多个示例,如simple_demo、filters_demo等,适用于机器人导航和自主驾驶领域的栅格地图应用。
文章目录
0 引言
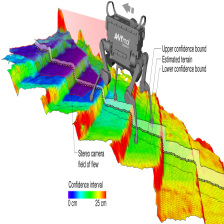
苏黎世的grid map是一种用于环境建图的算法,也称为Occupancy Grid Mapping(占据栅格地图)。该算法将环境划分为一系列正方形的栅格,每个栅格表示环境中的一个小区域。栅格的状态可以是占据(occupied)、自由(free)或未知(unknown),用于表示栅格内是否有障碍物或是否可以通过。在建图过程中,机器人通过传感器获取环境的信息,将该信息转换为栅格地图的形式,并利用栅格地图进行定位和路径规划等任务,具有较高的实时性和可扩展性。该算法已被广泛应用于机器人导航、自主驾驶等领域。

grid map包含多个子工程文件,以下是子工程的简要介绍:
grid_map_core:包含grid map类的定义,实现了所有grid map的核心算法和数据结构。gr

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1649
1649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











