







广州谦辉信息科技有限公司

创客基地QQ群:489095605 232237692
邮箱:Huangkaida@makerbase.com.cn
MKS SKIPR V1.0使用说明书
文章目录
一、产品简述
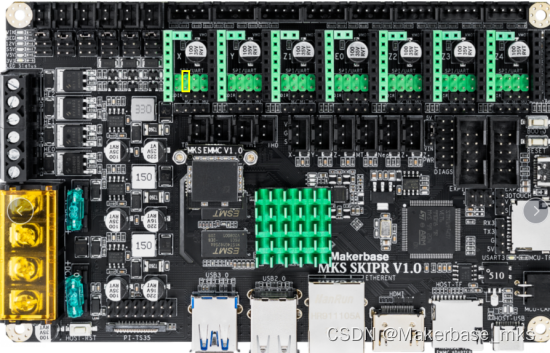
MKS SKIPR 是Makerbase推出的用于运行Klipper固件的一体七轴主板,主板集成了运行Klipper主机的SOC和负责执行具体机器动作的MCU,满足绝大部分3d打印机型的使用。
1.1特点优势
1、 SOC采用Rockchip的4核Cortex-A53架构的RK3328搭配Armbian系统,完美运行Klipper主机;
2、 MCU使用Cortex-M4架构的STM32F407VET6,168Mhz主频,轻松驾驭各种机器动作;
3、保留MKS PI丰富的接口资源[搭配1GBytes的DDR3内存,支持HDMI屏幕接口、PI-TS35屏幕接口,提供有线以太网口、3路USB接口(可外接主控板、USB无线网卡、USB摄像头、U盘、USB键盘鼠标等);
4、支持从TF卡和EMMC模块启动系统(EMMC模块比TF卡更稳定,读写速度也更快),提供配套的EMMC烧录工具;
5、支持7轴步进驱动,满足大部分3D打印机机型要求;
6、 3路独立的MP1584PEN DC/DC模块,为整板电路稳定运行提供有力的保障
7、3路可控风扇,外加3路常开输出,均可独立选择VIN、12V或5V电压
8、为MOS电路和温度测量电路设计肖特基二极管保护
9、 设计反电动势能量吸收电路以保护步进驱动模块
10、 Z+接口可独立设置电压选择以适应不同型号的PROBE
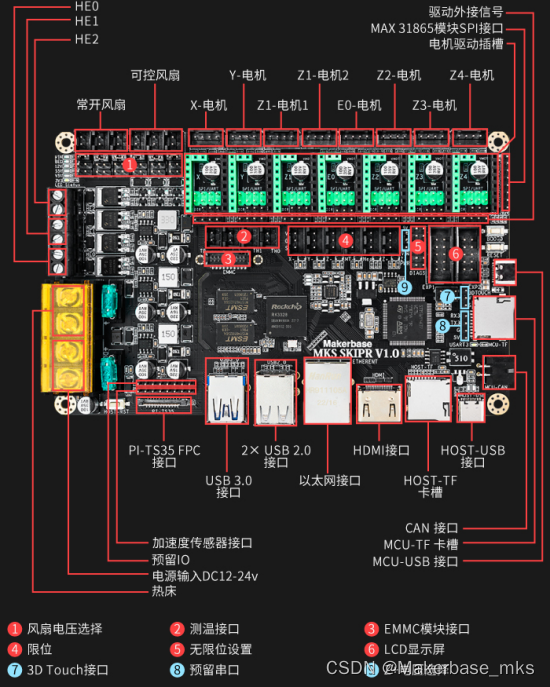
1.2接线图
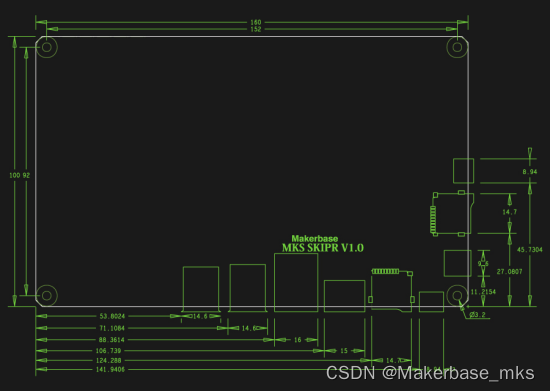
1.3尺寸图
主板尺寸图:
二、镜像文件下载、安装
2.1硬件准备
*一张不小于8G的TF存储卡 或EMMC模块
*TF读卡器 或EMMC烧录工具
*安装有windows操作系统的PC
*无线网卡或网线
*Type_C数据线
2.2软件准备
*镜像下载地址:https://pan.baidu.com/s/18w0Y2TIa4QmhUYSxecSQIw?pwd=g5dn
提取码:g5dn
*balenaEtcher v1.5及以上版本 下载地址:
https://www.balena.io/etcher/
2.3 TF卡烧录镜像
2.3.1格式化TF卡
烧录镜像前进行TF卡格式化
2.3.2烧录镜像
1)把已格式化好的TF卡插到读卡器,将读卡器插到电脑
2)将已下载好的镜像文件解压
3)安装下载好的balenaEtcher-Setup-1.5.122.exe
4)运行balenaEtcher
5)导入解压好的镜像文件

6)选择TF卡
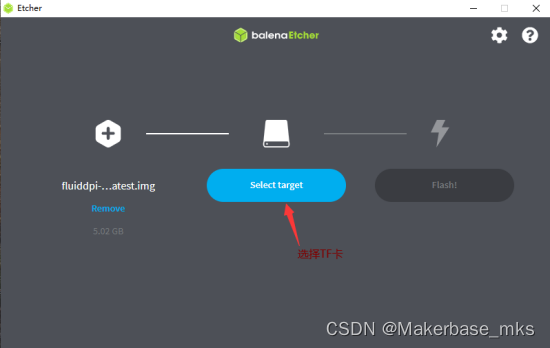
7)点击开始烧录

8)将烧录好的镜像文件插入主板的HOST_TF卡座
2.4 EMMC模块烧录镜像
将EMMC模块安装到EMMC烧录模块上,插入到usb读卡器,接上到电脑,然后按照TF卡的烧录步骤进行烧录。


三、 网络连接
3.1WiFi连接
1、将USB无线网卡安装到主板上的usb接口
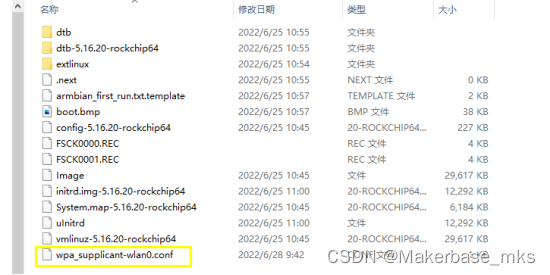
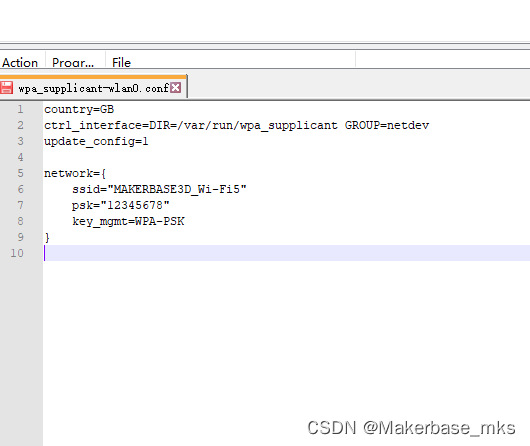
2、烧录镜像文件的TF卡或EMMC模块会分出一个255M的分区,打开该分区,找到wpa_supplicant-wlan0.conf文件,打开该文件进行配置wifi名称和密码的配置。
3、将TF卡或EMMC模块安装到主板上,主板供电,带有屏幕的,可以在屏幕的“Setting”→“Network”界面查看ip,没有屏幕的可在网络的路由器管理界面查看,也可以在Putty发送指令 ip a查看。
3.2 网线连接
1、将能上网的网线接入到主板的网口
2、主板上电,启动后,带有屏幕的,可以在屏幕的“Setting”→“Network”界面查看ip,没有屏幕的可在网络的路由器管理界面查看,也可以在Putty发送指令 ip a查看。
四、Putty 连接
Putty 的作用是通过数据线连接系统,进行固件的编译,在线升级等
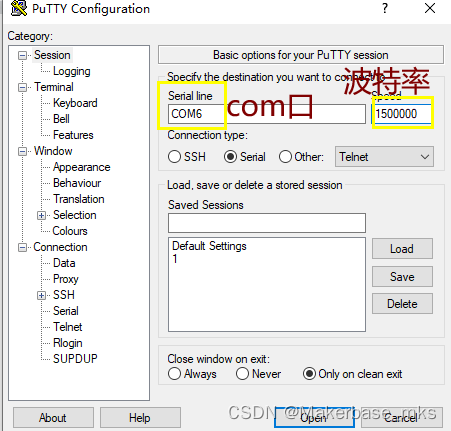
4.1用Type_c数据线与主板的Host_USB连接,主板供电,在电脑的设备管理器查看com口,然后打开Putty
4.2选择com口,设置波特率1500000,点击Open打开连接
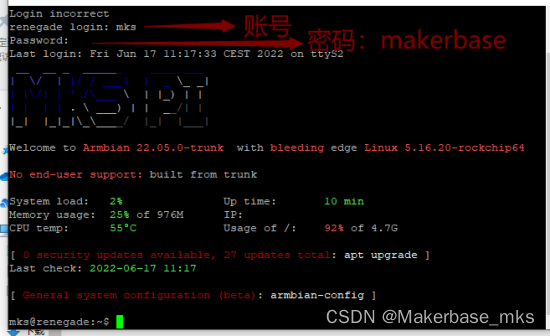
4.3进入下面界面,点击回车(ENTER)键

4.4然后输入账号:mks, 密码:makerbase
五、SSH连接
SSH的作用是无线发送指令操作系统,进行固件的编译,在线升级等
1)下载安装Xshell软件,Xshell6Portable 下载地址:https://www.netsarang.com/zh/free-for-home-school/
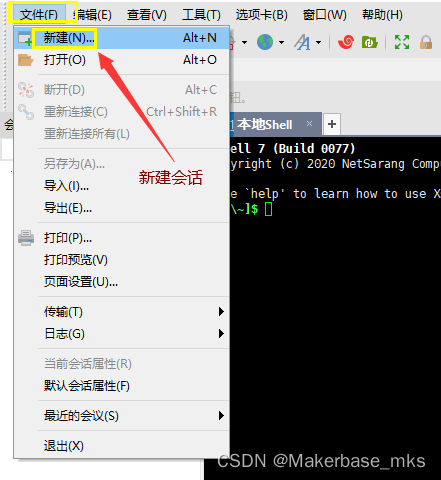
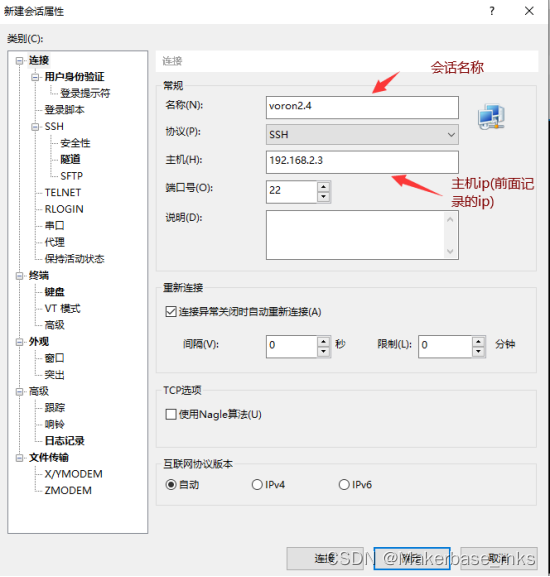
2)打开Xshell软件,建立新的会话
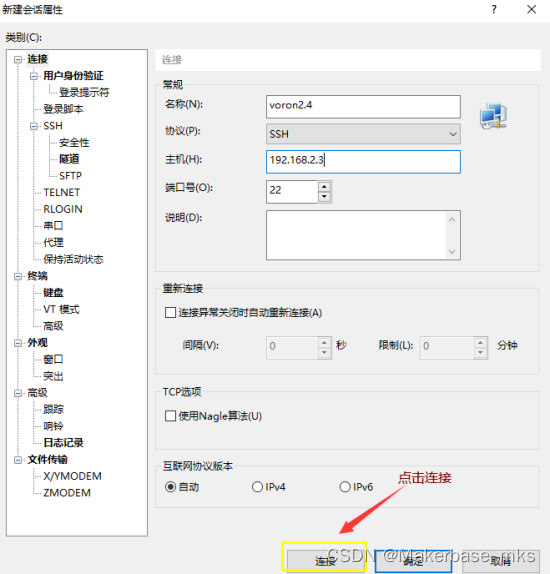
2)然后点击连接
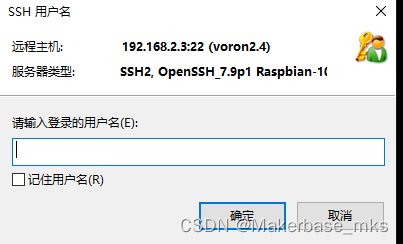
4)连接后弹出设置用户名界面,输入用户名:mks
5)双击新建的会话连接,弹出密码输入界面,密码:makerbase输入密码后进入linux操作系统的用户界面shell。
六、MKS PI_TS35屏幕连接和操作
将TS35屏幕排线接到PI上的SPI接口,启动后可在屏幕上进行操作打印机。

七、加速度传感器ADXL345连接和配置
MKS PI与ADXL345的连接如下:
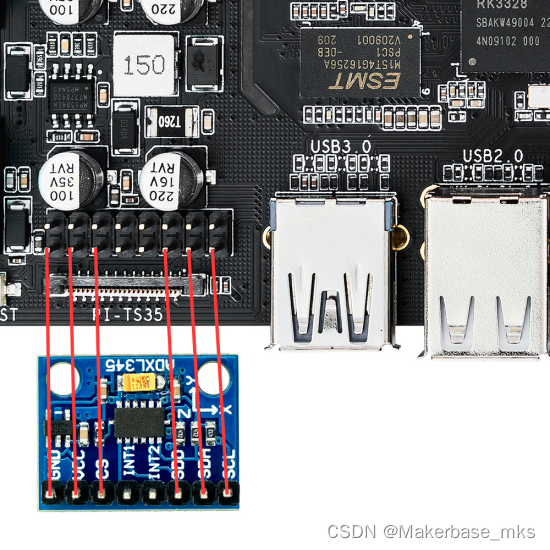
MKS PI镜像默认已安装加速度计算库和依赖库,不用额外配置,在配置文件中配置ADXL345和测试位置参数即可。
1、在配置文件中配置adxl345,将以下参数复制到配置文件中
[mcu rpi]
serial: /tmp/klipper_host_mcu
[adxl345]
cs_pin: rpi:None
spi_bus: spidev0.2
保存重启,网页界面没有报错后发送查询指令:
ACCELEROMETER_QUERY
软硬件安装正常,能接收到加速度传感器数据,数据类似如下:
Recv: // adxl345 values (x, y, z): 430.619210, 831.432400, 8718.156800...
2、配置adxl345的测试位置,一般安装在平台的中间位置
[resonance_tester]
accel_chip: adxl345
probe_points:
115, 115, 20 # an example
3、测试加速度,配置input_shaper数据
测试前,先把打印机的加速度配置调大(测试完后可以改小)
[printer]
max_accel: 7000
max_accel_to_decel: 7000
如果配置文件中有input_shaper功能参数,需要发送指令关掉
SET_INPUT_SHAPER SHAPER_FREQ_X=0 SHAPER_FREQ_Y=0
然后发送自动测试配置命令开始测试震动
SHAPER_CALIBRATE
测试完后会返回x轴和y轴推荐的配置方法和配置值,把值配置在配置文件中,然后保存重启,配置类似如下:
[input_shaper]
shaper_type_x = 3hump_ei
shaper_freq_x = 52.4
shaper_type_y = 2hump_ei
shaper_freq_y = 37.5
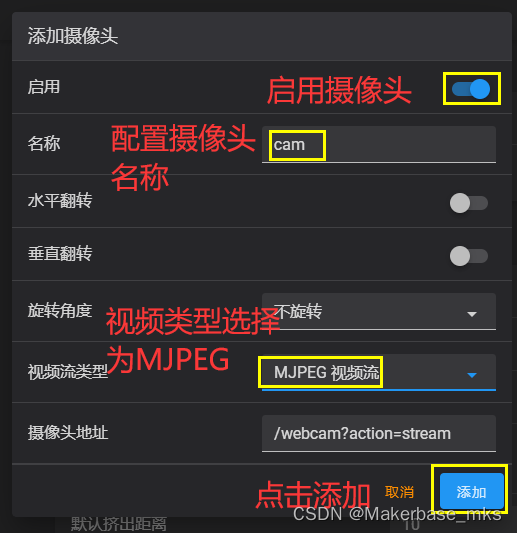
八、USB摄像头连接和配置
默认镜像文件已经安装MJPG-Streamer,只需要在fluidd网页上配置摄像头参数即可,配置项如下:
1、在网页界面的配置项→选择摄像头→添加摄像头

2、启用摄像头→配置摄像头名称→视频类型选择为MJPEG视频流,然后保存,返回到主界面能查看到图像即可。
九、主板固件更新
固件下载链接: https://github.com/makerbase-mks/MKS-SKIPR/blob/main/klipper%20firmware/mks_skipr.bin
十、klipper 配置文件配置
MKS SKIPR配置文件下载链接:https://github.com/makerbase-mks/MKS-SKIPR/blob/main/klipper%20firmware/skipr%20to%20voron%20V2.4.cfg
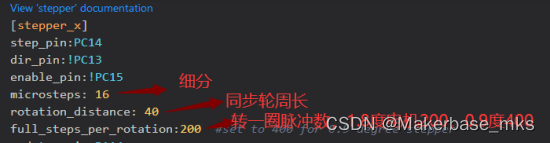
10.1 X、Y、Z 、E电机参数配置
1、X和Y轴脉冲设置,只需要设置细分、同步轮周长、电机转一圈的脉冲数。
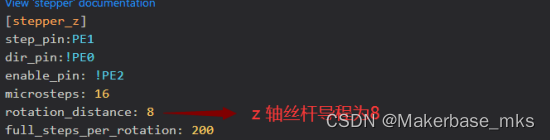
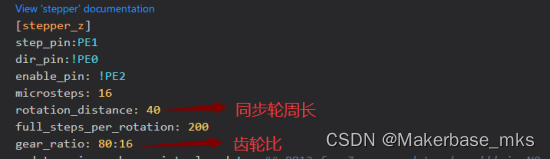
2、Z轴电机脉冲设置,Z轴电机的脉冲设置分两种情况,当机器的Z轴是丝杆时,同步轮周长的参数设置为丝杆的导程,当Z轴为同步轮与皮带时,则Z轴设置为同步轮的周长和齿轮比。
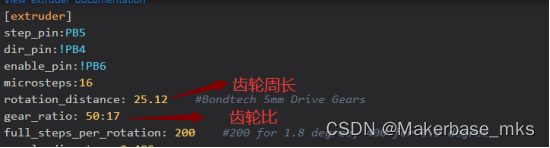
4、挤出机脉冲设置,当挤出机齿轮没有齿轮比时,设置挤出机次齿轮的周长即可,当用齿轮比的挤出机还需要设置齿轮比。
10.2 归零限位和电平
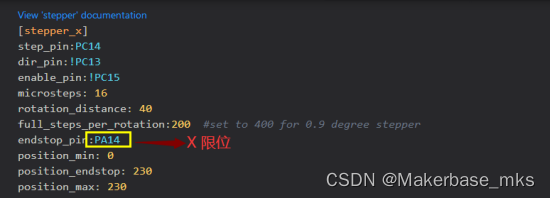
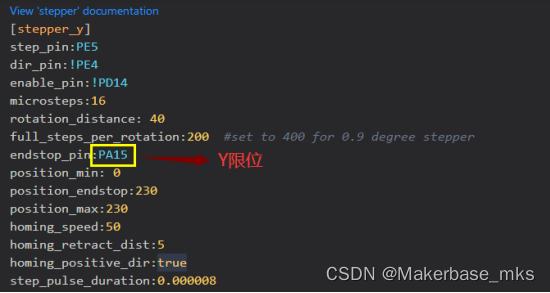
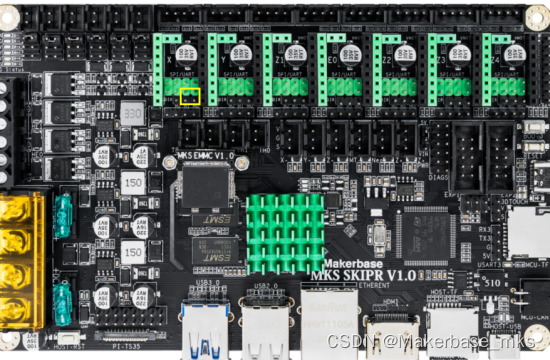
X、Y的限位pin分别是PA14、PA15,Zmin的限位是PB15,Zmax的限位是PB14,取反电平,在pin前加!。
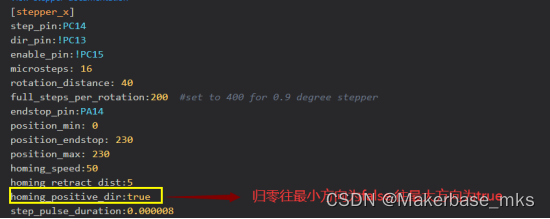
10.3 归零电机方向配置
当归零的方向为往最小的方向时,homing_positive_dir:false,当归零方向为往最大方向时,homing_positive_dir:true
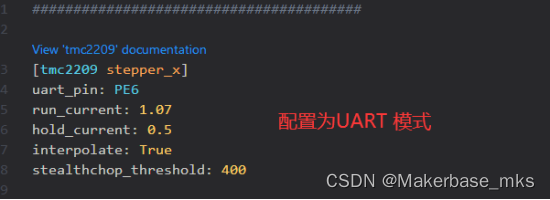
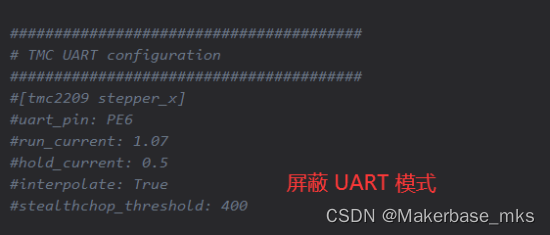
10.4 TMC驱动 UART模式配置
将TMC驱动前面的#去掉为配置为uart模式,不去掉则为屏蔽TMC UART
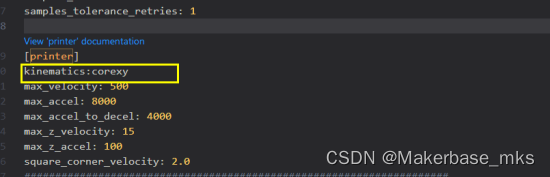
10.5 机器类型配置
机器类型分别为cartesian(一般机型)、corexy(corexy机型)、delta(三角洲机型),根据自己的机器进行设置。
10.6 手动调平配置
在配置文件中增加手动调平的各点的位置
[bed_screws]
screw1:20,20
screw2:20,290
screw3:290,20
screw4:290,290
10.7自动调平传感器配置(传感器为3Dtouch)
1、信号配置,白线是3dtouch的信号线,黄线是3dtouch的舵机控制线),舵机控制线接到主板上的PB14/PB15接口,信号线接到主板的PA8。
[bltouch]
sensor_pin:!PB14
control_pin:PA8
x_offset: 0
y_offset: 25.0
z_offset: 0.30
speed: 10.0
samples: 2
samples_result: median
sample_retract_dist: 3.0
samples_tolerance: 0.05
samples_tolerance_retries: 1
10.8自动调平传感器配置(传感器为PL08N)
1、信号配置,信号接到主板上的z_min的接口PB15。
[probe]
pin:!PB15
x_offset: 0
y_offset: 25.0
z_offset: 0.30
speed: 10.0
samples: 2
samples_result: median
sample_retract_dist: 3.0
samples_tolerance: 0.05
samples_tolerance_retries: 1
注意:[bltouch]和[probe]不能同时配置,配置时只能选择其中一个。
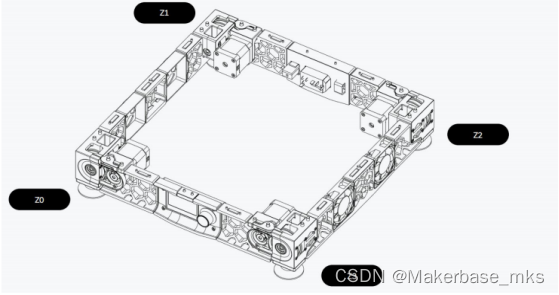
10.9 多Z自动校准调平配置(VORON V2.4)
多Z自动校准调平,需要在printer.cfg的文件中增加以下代码,探测点的位置根据机器的尺寸范围设置,4个探测点分别对应4Z的位置。
[quad_gantry_level]
gantry_corners:
-58,-7
308,318
## Probe points
points:
10,10 #调平探测第一点
10,200 #调平探测第二点
220,200 #调平探测第三点
220,10 #调平探测第四点
speed: 80 #调平速度
horizontal_move_z: 10 #调平中Z抬高高度
retries: 1 #重复次数
retry_tolerance: 0.05 #重复允许最大偏差
max_adjust: 30 #Z最大调整位置
Voron 2.4的4Z位置如下:
在配置文件中增加多Z自动调平指令配置,进行自动调平,可在Fluidd界面上发送指令G32或在屏幕上点击按钮"Configuration"→"Bed level"。
[gcode_macro G32]
gcode:
BED_MESH_CLEAR #清除调平数据
G28
QUAD_GANTRY_LEVEL #多Z自动校准
G28
10.10 线性补偿自动调平配置
在配置文件中增加线性调平的配置
[bed_mesh]
speed:50 #调平速度
horizontal_move_z:50 #调平中Z抬高高度
mesh_min:20,50 #探测点最小位置
mesh_max:170,200 #探测点最大位置
probe_count:3,3 #调平点数
在配置文件中增加多线性调平指令配置,进行自动调平,可在Fluidd界面上发送指令G29或在屏幕上点击按钮"Configuration"→"Bed level"。
[gcode_macro G29]
gcode:
BED_MESH_CLEAR #清除调平数据
G28
BED_MESH_CALIBRATE #自动调平
BED_MESH_PROFILE SAVE=name #保存调平数据
SAVE_CONFIG
BED_MESH_PROFILE LOAD=name #加载调平数据
10.11 z_safe_homing配置
在配置文件中增加z_safe_homing的配置,
[safe_z_home]
home_xy_position: 115,115 # x、Y归零位置
speed: 100
z_hop: 10 # Move up 10mm
z_hop_speed: 5
需要在stepper_z的调平配置项把enstop_pin改为z_virtual_enstop
[stepper_z]
endstop_pin:probe:z_virtual_endstop
十一、驱动跳线
1、TMC2208、2209、2226普通模式16细分跳线
2、TMC2225普通模式16细分跳线
3、A4988 16细分跳线
4、TMC驱动UART模式跳线
十二、FAQ
1、在Fluidd界面上操作复位(或配置文件保存重启后参数恢复为原始参数)不能复位
解决方法:可以在配置文件[mcu]中增加配置:restart_method: command,如下:
[mcu]
# The hardware use USART1 PA10/PA9 connect to RK3328
#serial: /dev/serial/by-id/usb-Klipper_stm32f407xx_4D0045001850314335393520-if00
serial: /dev/ttyS0
restart_method: command
2、USB 摄像头无法工作
解决方法:USB 摄像头连接到PI 后,可以在putty或shell上发送指令lsusb查看USB摄像头是否装载成功,装载成功类似如下:
若安装成功,请检查网页界面摄像头配置是否正确,若无法查看设备,请检查设备是否能正常工作。
3、USB摄像头更换USB 接口连接后无法工作
解决方法:给PI重新上电
4、关于系统更新
解决方法:因为MKS PI的系统文件是基于Armbian桌面系统进行移植的,直接更新Armbian桌面系统会存在一些问题,所以暂不建议更新系统。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









