







Makerbase SimpleFOC ESP32 例程8 电机旋钮控制测试
第一部分 硬件介绍
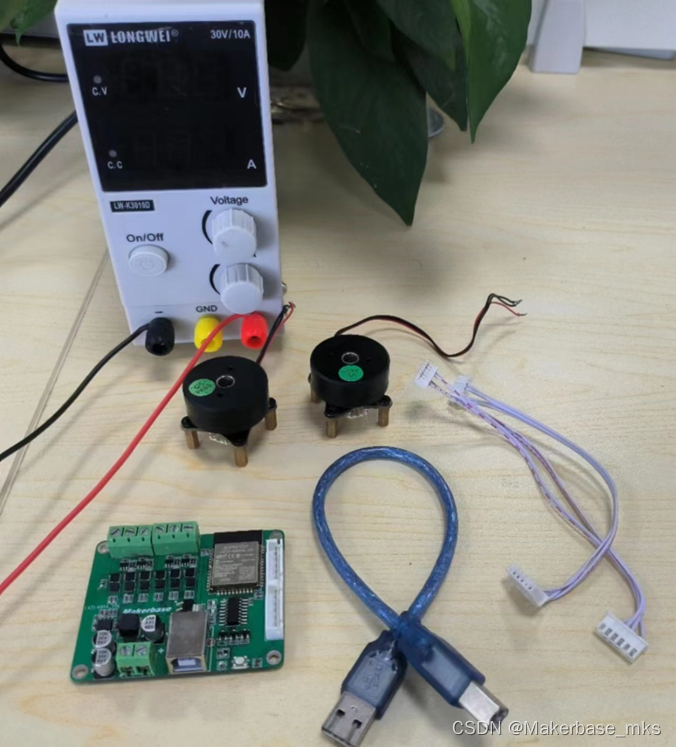
1.1 硬件清单
| 序号 | 品名 | 数量 |
|---|---|---|
| 1 | ESP32 FOC V1.0 主板 | 1 |
| 2 | YT2804电机 | 2 |
| 3 | 12V电源适配器 | 1 |
| 4 | USB 线 | 1 |
| 5 | 6pin杜邦线 | 2 |
注意:YT2804是改装的云台无刷电机,带有AS5600编码器,可实现360°连续运转。
主要参数如下:
| 序号 | 品名 | 数量 |
|---|---|---|
| 1 | 输入电压 | 12V |
| 2 | 极对数 | 7 |
| 3 | 工作电流 | 180mA |
| 4 | 最大转速 | 3840RPM |
| 5 | 编码器分辨率(I2C)接口 | 12bit |
| 6 | 编码器分辨率(Analog)接口 | 1024 |
硬件清单如下图所示:
ESP32 FOC V1.0主板说明书等更多资料请加入企鹅群(732557609)下载

1.2 硬件连接
1.电机的三根相线连接至ESP32 FOC主板
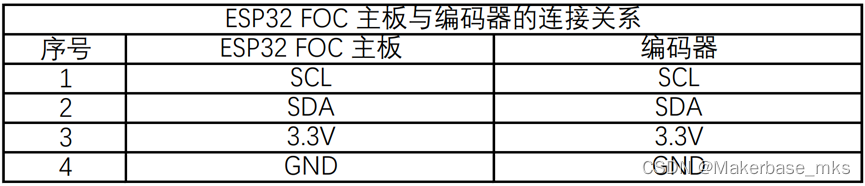
2.连接电机的AS5600编码器至ESP32 FOC主板,端口对应关系如下表
(编码器端口对应关系如下方实物图所示,注意不要接反)
3.用USB线连接ESP32 FOC主板与PC
4.12V电源适配器连接主板
注意:请不要在上电的情况下进行硬件连接!
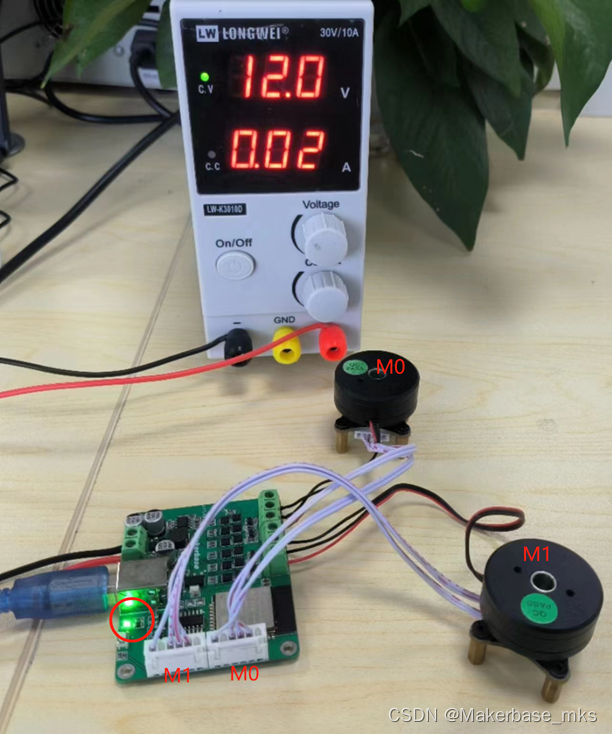
上电后绿色指示灯亮
第二部分 软件配置
2.1 PC系统
Windows 10家庭中文版
2.2软件准备
Arduino 1.8.13
可从官方网站下载
也可从企鹅群(732557609)下载
2.3 安装Arduino
略
2.4 安装SimpleFOC library
详情请查看《Makerbase SimpleFOC 第一课 入门配置》
文章链接:https://blog.csdn.net/gjy_skyblue/article/details/115353908
注意:本例程使用的库版本为2.1.1,如果已经下载过其他版本,则需要更换版本。
更换版本的方法请参照往期示例。
文章链接:
第三部分 电机旋钮控制测试
3.1 修改代码
1.检查硬件连接,之后给主板上电。
2.用Arduino打开测试例程代码 8_knob_and_motor。
(例程代码请加入企鹅群下载)
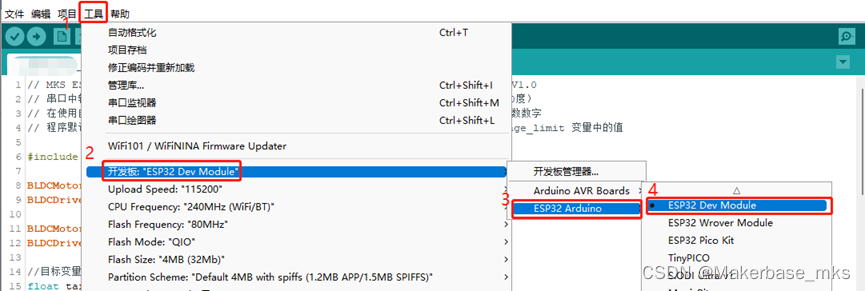
3.点击工具=>开发板=>ESP32 Arduino=>ESP32 Dev Module。
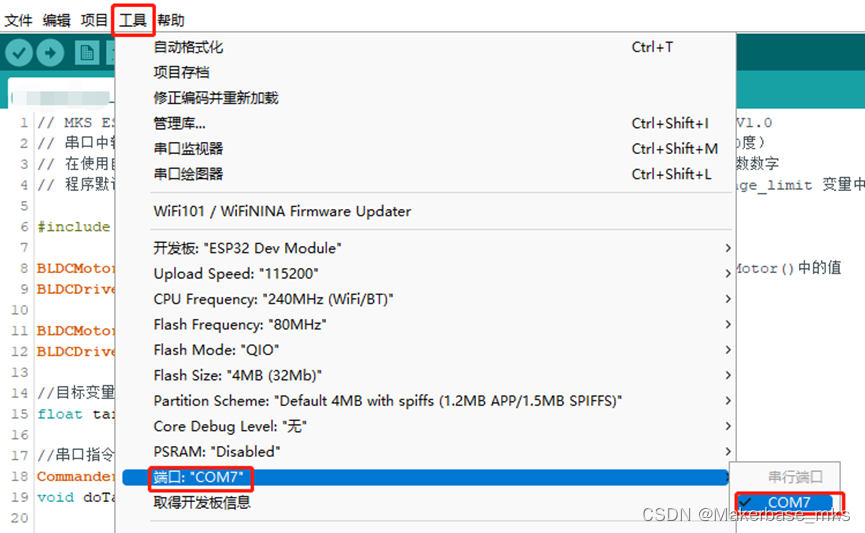
4.点击工具=>端口=>COM▢,选择对应的USB端口号。
5.16行和19行,根据选用电机的极对数修改BLDCMotor()中的值。

6.34行和37行,根据供电电压修改voltage_power_limit的值

7.48行至49行,根据供电电压修改voltage_limit的值

8.51行至52行,根据选用电机修改PID参数以实现更好的效果。(电机出现抖动或转速不稳定的情况,很有可能就是PID参数没调至最佳)

3.2 编译上传与测试
1.点击左上角的的上传按钮

等待编译上传

等待显示上传成功

2 . 代码上传成功后,电机会进行自动校准。
之后,一个电机将作为一个旋钮,另一个电机会进行旋转。
通过扭动作为旋钮的电机,可以对另一个电机的旋转速度进行控制。
Makerbase ESP32 FOC 例程8 电机旋钮控制测试 到此结束。
请继续关注后续课程。
欢迎加入 创客基地 电机控制企鹅群 讨论电机控制相关问题:732557609
欢迎光临 创客基地 B站 了解技术资料
欢迎光临 创客基地 taobao店 采购产品

















 2274
2274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









