









之前博文已经介绍过机器人exploration以及多机器人SLAM map merage《ROS学习笔记之——多机器人探索环境》《ROS仿真笔记之——基于gazebo的多机器人探索环境仿真》《ROS仿真笔记之——多移动机器人SLAM地图融合》《ROS仿真笔记之——移动机器人自主探索式地图构建》之前的都是基于功能包(http://wiki.ros.org/multirobot_map_merge/)
目录
原理
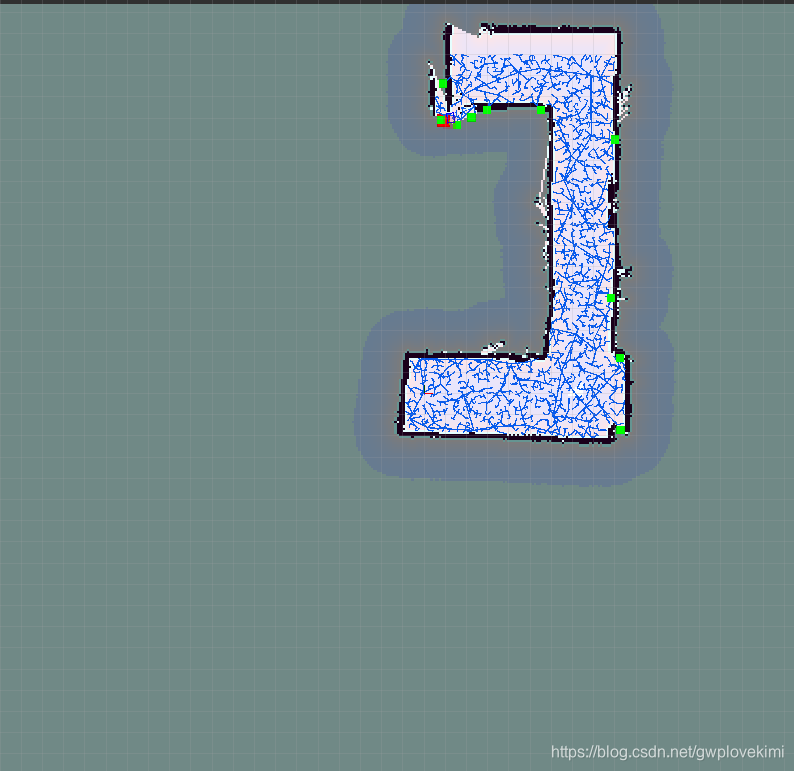
该包的基本原理是,基于2D的,通常采用图像算法的边缘检测来检测已知区域与未知区域的边界。基于Rapidly-exploring Random Trees的探索策略。由于RRT基本上是朝向未知区域的(unexplored and unvisited),并且RRT可以扩展到更高维区域。同时采用local tree与global tree来检查边缘点,使得机器人的exploration更加高效。
一旦检测到边缘后,就会取其中心为目标点,然后让机器人去探索该点。而为了检测边缘点,需要对整张地图进行处理,而这个操作通常是耗时的,为此大量的研究人员focus在检测frontier edges的效率上。
本包中,RRT树只是用于search边缘点,而检测到的边缘点经过滤波就会依次安排给机器人。当机器人接收到point时,就会运动到对应的点。在此期间,机器人上的传感器将会扫描建图。
而通过多个独立的RRT树来加速边缘点的检测,则是本包的创新点。
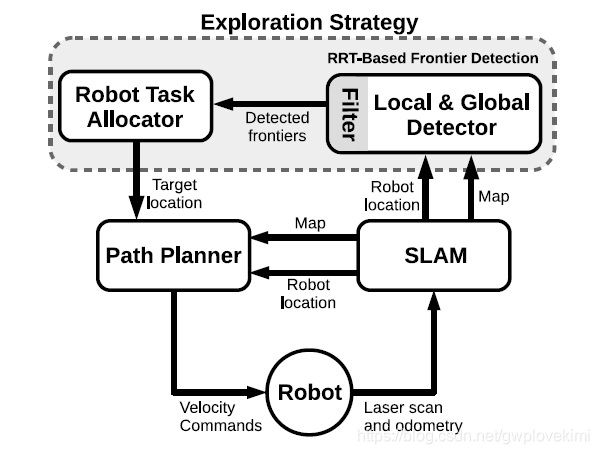
如下图所示,主要分为三个模块。
- 基于RRT的边界检测模块(负责检测边界点)
- 滤波模块(存储边界点,并通过mean shift算法来聚类,检测出无效以及旧的边界点)
- 以及task allocator模块(接收到滤波模块传来的边界点后,分配到机器人)
而本包还需要与SLAM及path planning模块相结合来使用
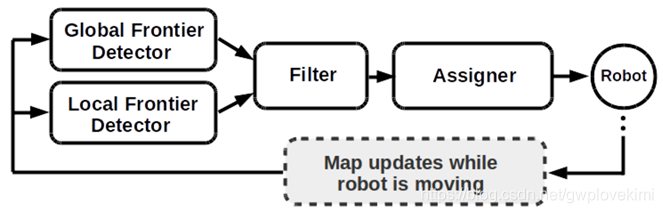
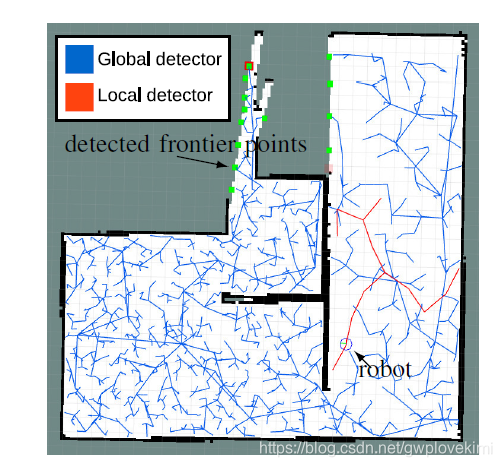
关于global与local detector。如下图所示。当检测到一个边界点时,local detector会reset,并且会基于机器人当前的位置重新生长。这带来两个好处:1、检测边界点更快。因为机器人总是会向着边界点移动,而如果RRT树从机器人当前的位置开始,那么它到达未知区域的概率更高。2、机器人可能会miss掉一些地图上边角的小的边界点,而为了解决这个问题,就通过global detector。但随着地图的变大,global detector会越来越慢(或者说,随着树的变大,exploration会变慢),为此需要local detector
而关于assigner,其基于以下几个要素来分配机器人导航的目标点:
- Navigation cost
- Information gain
仿真
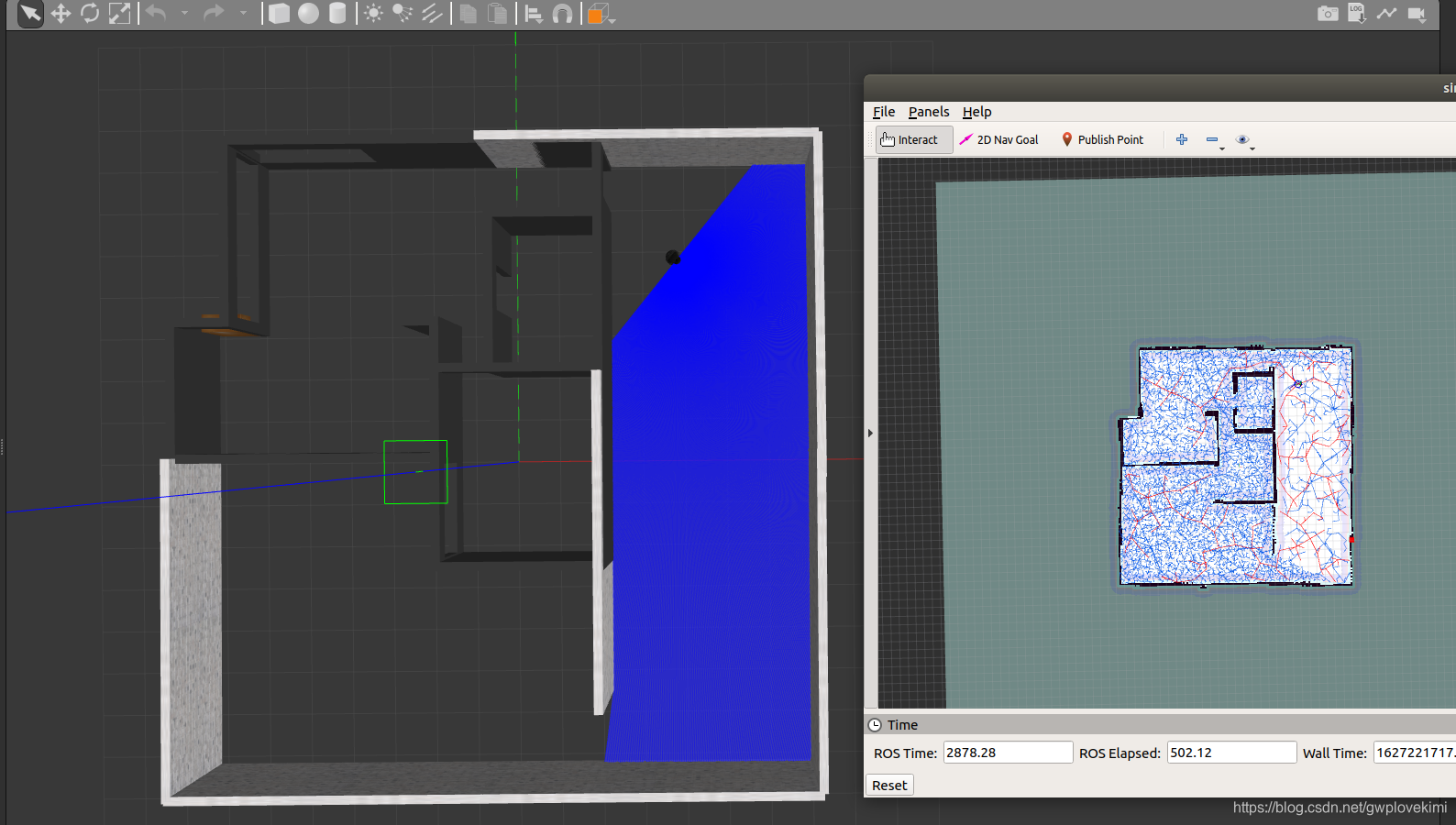
而本博文基于rrt_exploration包来进行仿真。网上也有大把基于此包的博客。但是本人实现时都无法跑动(可能是版本的原因?老显示tf无法链)为此,更改了原包的机器人模型为turtlebot3 waffle并且调了一些路径规划的参数,终于调出来了,效果如下视频所示~
single kobuki robot slam based on rrt
单机器人自主探索建图
单机器人自主探索建图(1)
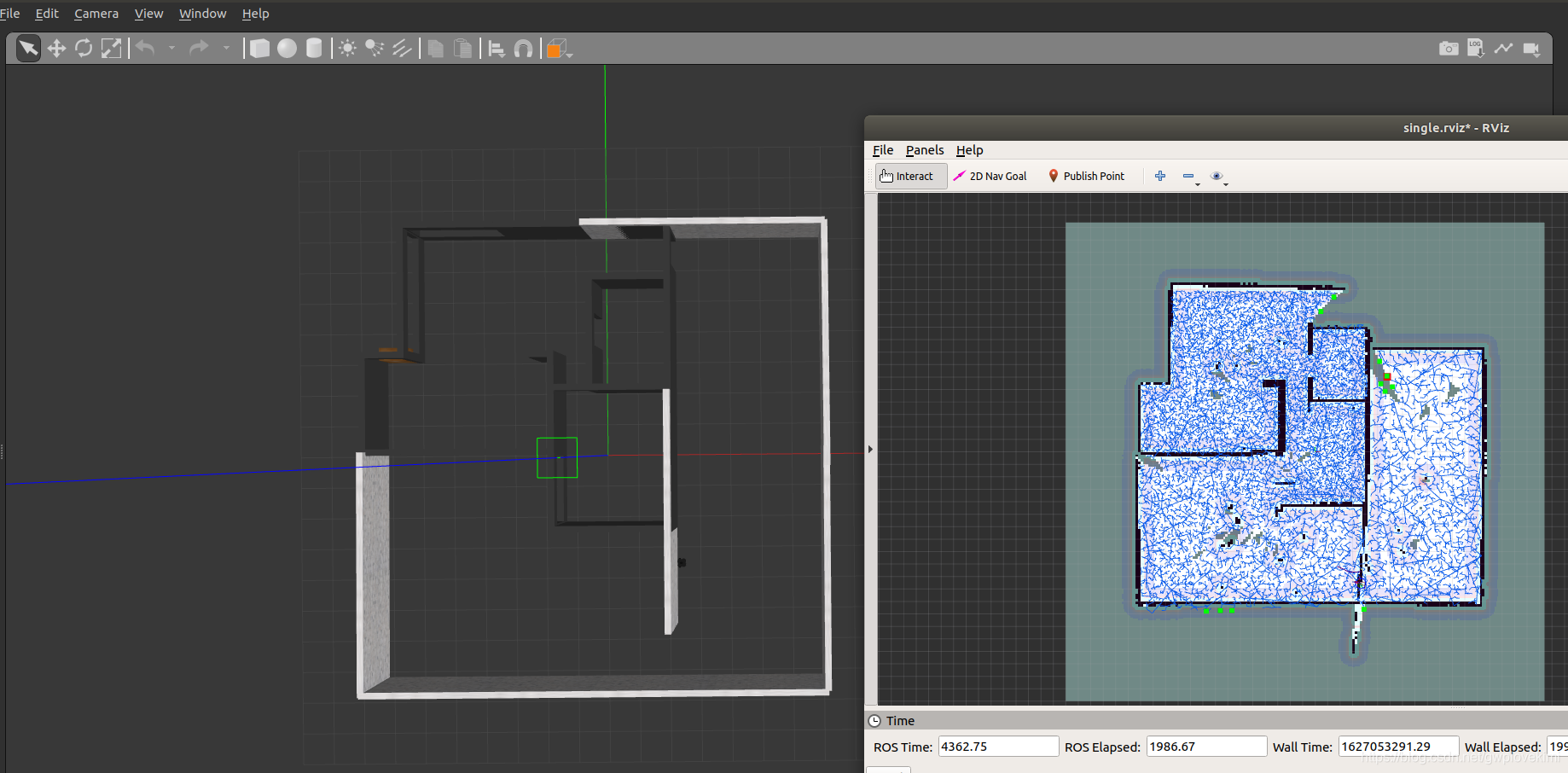
换成kobuki模型效果好很多~
运行命令:
roslaunch rrt_exploration_tutorials single_simulated_house.launch
roslaunch rrt_exploration single.launch 注意要保证move base的开启
single_simulated_house.launch
<!-- Launch file for signle robot on Gazebo -->
<launch>
<env name="GAZEBO_RESOURCE_PATH" value="$(find rrt_exploration_tutorials)/launch/includes/meshes"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="world_name" value="$(find rrt_exploration_tutorials)/launch/includes/worlds/house.world"/>
<!-- <remap from="/robot_1/cmd_vel" to="/robot_1/mobile_base/commands/velocity"/> -->
</include>
<group ns="robot_1">
<include file="$(find rrt_exploration_tutorials)/launch/includes/robot.launch.xml">
<arg name="robot_name" value="robot_1"/>
<arg name="init_pose" value="-x 0.0 -y 0.0 -z 0.0"/>
</include>
<include file="$(find rrt_exploration_tutorials)/launch/includes/move_baseSafe.launch">
<arg name="namespace" value="robot_1"/>
</include>
</group>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rrt_exploration_tutorials)/launch/includes/rviz_config/single.rviz">
<remap from="move_base_simple/goal" to="robot_1/move_base_simple/goal"/>
</node>
</launch>
move_baseSafe.launch
<!-- move base -->
<launch>
<master auto="start"/>
<arg name="namespace"/>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<!-- <arg name="cmd_vel_topic" default="/cmd_vel" /> -->
<!-- <arg name="odom_topic" default="odom" />
<arg name="move_forward_only" default="false"/> -->
<param name="use_sim_time" value="true" />
<!-- <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" >
<remap from="scan" to="base_scan"/>
<param name="map_frame" value="$(arg namespace)/map"/>
<param name="odom_frame" value="$(arg namespace)/odom"/>
<param name="base_frame" value="$(arg namespace)/base_link"/>
<param name="map_update_interval" value="2.0"/>
<param name="maxUrange" value="50.0"/>
<param name="maxRange" value="50.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.01"/>
<param name="angularUpdate" value="0.01"/>
<param name="temporalUpdate" value="0.1"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-5.0"/>
<param name="ymin" value="-5.0"/>
<param name="xmax" value="5.0"/>
<param name="ymax" value="5.0"/>
<param name="delta" value="0.1"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<param name="minimumScore" value="0.005"/>
</node> -->
<!-- <node pkg="move_base" type="move_base" respawn="false" name="move_base_node" output="screen">
<param name="footprint_padding" value="0.01" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="3.0" />
<param name="oscillation_timeout" value="30.0" />
<param name="oscillation_distance" value="0.5" />
<param name="planner_patience" value="1" />
<param name="controller_patience" value="1" />
<remap from="cmd_vel" to="mobile_base/commands/velocity"/>
<param name="recovery_behavior_enabled" value="false" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/base_local_planner_params.yaml" command="load" />
<param name="global_costmap/global_frame" value="$(arg namespace)/map"/>
<param name="global_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="global_costmap/laser_scan_sensor/sensor_frame" value="/$(arg namespace)/base_laser_link"/>
<param name="global_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/global_frame" value="$(arg namespace)/odom"/>
<param name="local_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="local_costmap/laser_scan_sensor/sensor_frame" value="$(arg namespace)/base_laser_link"/>
<param name="local_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/obstacle_layer/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
</node> -->
<!-- <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg namespace)/base_link"/>
<param name="odom_frame" value="$(arg namespace)/odom"/>
<param name="map_frame" value="$(arg namespace)/map"/>
<param name="map_update_interval" value="2.0"/>
<param name="maxUrange" value="3.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="50"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.2"/>
<param name="temporalUpdate" value="0.5"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="100"/>
<param name="xmin" value="-10.0"/>
<param name="ymin" value="-10.0"/>
<param name="xmax" value="10.0"/>
<param name="ymax" value="10.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node> -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg namespace)/base_link"/>
<param name="odom_frame" value="$(arg namespace)/odom"/>
<param name="map_frame" value="$(arg namespace)/map"/>
<param name="map_update_interval" value="2.0"/>
<param name="maxUrange" value="50.0"/>
<param name="maxRange" value="50.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<!-- <param name="minimumScore" value="50"/> -->
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.01"/>
<param name="angularUpdate" value="0.01"/>
<param name="temporalUpdate" value="0.1"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="100"/>
<param name="xmin" value="-10.0"/>
<param name="ymin" value="-10.0"/>
<param name="xmax" value="10.0"/>
<param name="ymax" value="10.0"/>
<param name="delta" value="0.1"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<param name="minimumScore" value="0.005"/>
</node>
<node pkg="move_base" type="move_base" respawn="false" name="move_base_node" output="screen">
<param name="footprint_padding" value="0.01" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="3.0" />
<param name="oscillation_timeout" value="30.0" />
<param name="oscillation_distance" value="0.05" />
<param name="planner_patience" value="1" />
<param name="controller_patience" value="1" />
<!-- <remap from="cmd_vel" to="mobile_base/commands/velocity"/> -->
<remap from="cmd_vel" to="cmd_vel"/>
<param name="recovery_behavior_enabled" value="false" />
<param name="clearing_rotation_allowed" value="true" />
<param name="min_vel_x" value="-0.3" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/base_local_planner_params.yaml" command="load" />
<!-- <rosparam file="$(find turtlebot3_navigation)/param/a_costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" /> -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/a_costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" /> -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/a_local_costmap_params.yaml" command="load" /> -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/a_global_costmap_params.yaml" command="load" /> -->
<!-- move_based对应的参数 -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load" /> -->
<!-- 局部路径规划对应的参数 -->
<!-- <rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/global_costmap_params.yaml" command="load" /> -->
<!-- <rosparam file="$(find rrt_exploration_tutorials)/param/base_local_planner_params.yaml" command="load" /> -->
<!-- <param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find turtlebot3_navigation)/param/dwa_local_planner_params_$(arg model).yaml" command="load" />
<remap from="odom" to="$(arg odom_topic)"/>
<param name="DWAPlannerROS/min_vel_x" value="0.0" if="$(arg move_forward_only)" /> -->
<param name="global_costmap/global_frame" value="$(arg namespace)/map"/>
<param name="global_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="global_costmap/laser_scan_sensor/sensor_frame" value="/$(arg namespace)/base_laser_link"/>
<param name="global_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/global_frame" value="$(arg namespace)/odom"/>
<param name="local_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="local_costmap/laser_scan_sensor/sensor_frame" value="$(arg namespace)/base_laser_link"/>
<param name="local_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/obstacle_layer/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
</node>
<!-- <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> -->
<!-- 启动局部路径规划base_local_planner,选用dwa_local_planner/DWAPlannerROS方法 -->
<!-- <param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" /> -->
<!-- 启动costmap节点及对应的参数 -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/global_costmap_params.yaml" command="load" /> -->
<!-- move_based对应的参数 -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load" /> -->
<!-- 局部路径规划对应的参数 -->
<!-- <rosparam file="$(find turtlebot3_navigation)/param/dwa_local_planner_params_$(arg model).yaml" command="load" />
<remap from="cmd_vel" to="$(arg cmd_vel_topic)"/>
<remap from="odom" to="$(arg odom_topic)"/>
<param name="global_costmap/global_frame" value="$(arg namespace)/map"/>
<param name="global_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="global_costmap/laser_scan_sensor/sensor_frame" value="$(arg namespace)/base_scan"/>
<param name="global_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/global_frame" value="$(arg namespace)/odom"/>
<param name="local_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="local_costmap/laser_scan_sensor/sensor_frame" value="$(arg namespace)/base_scan"/>
<param name="local_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="local_costmap/obstacle_layer/laser_scan_sensor/topic" value="/$(arg namespace)/base_scan"/>
<param name="DWAPlannerROS/min_vel_x" value="0.0" if="$(arg move_forward_only)" />
</node> -->
</launch>
robot.launch.xml
<!--
Spawns Kobuki inside a Gazebo simulation
-->
<launch>
<arg name="robot_name"/>
<arg name="init_pose"/>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<include file="$(find turtlebot3_bringup)/launch/includes/description.launch.xml">
<arg name="model" value="$(arg model)" />
</include>
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" />
<node pkg="gazebo_ros" type="spawn_model" name="spawn_$(arg robot_name)"
args="$(arg init_pose) -unpause -urdf -param robot_description -model $(arg robot_name)" respawn="false">
</node>
<!-- <param name="robot_description"
command="$(find xacro)/xacro.py '$(find rrt_exploration_tutorials)/launch/includes/urdf/kobuki_standalone.urdf.xacro'"/>
<node pkg="gazebo_ros" type="spawn_model" name="spawn_$(arg robot_name)"
args="$(arg init_pose) -unpause -urdf -param robot_description -model $(arg robot_name)" respawn="false">
</node> -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
<param name="use_tf_static" type="bool" value="false" />
<param name="tf_prefix" type="string" value="$(arg robot_name)"/>
</node>
</launch>
single.launch
<!-- Launch file for the rrt-detector and the assigner -->
<launch>
<arg name="eta" value="1.0"/>
<arg name="Geta" value="15.0"/>
<param name="namespace_init_count" value="1"/>
<node pkg="rrt_exploration" type="global_rrt_detector" name="global_detector" output="screen">
<param name="eta" value="$(arg Geta)"/>
<param name="map_topic" value="robot_1/map"/>
</node>
<node pkg="rrt_exploration" type="local_rrt_detector" name="local_detector" output="screen">
<param name="eta" value="$(arg eta)"/>
<param name="map_topic" value="robot_1/map"/>
<param name="robot_frame" value="robot_1/base_link"/>
</node>
<node pkg="rrt_exploration" type="filter.py" name="filter" output="screen">
<param name="map_topic" value="robot_1/map"/>
<param name="info_radius" value="1"/>
<param name="costmap_clearing_threshold" value="70"/>
<param name="goals_topic" value="/detected_points"/>
<param name="namespace" value="robot_"/>
<param name="n_robots" value="1"/>
<param name="rate" value="100"/>
</node>
<node pkg="rrt_exploration" type="assigner.py" name="assigner" output="screen">
<param name="map_topic" value="robot_1/map"/>
<param name="global_frame" value="robot_1/map"/>
<param name="info_radius" value="1"/>
<param name="info_multiplier" value="3.0"/>
<param name="hysteresis_radius" value="3.0"/>
<param name="hysteresis_gain" value="2.0"/>
<param name="frontiers_topic" value="/filtered_points"/>
<param name="n_robots" value="1"/>
<param name="namespace" value="robot_"/>
<param name="delay_after_assignement" value="0.5"/>
<param name="rate" value="100"/>
</node>
</launch>
实验
实验效果及视频如下:
(experiment) single kobuki robot slam based on rrt
参考资料
http://wiki.ros.org/rrt_exploration/Tutorials/singleRobot

















 2447
2447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









