







 本文介绍如何在ROS环境中使用ZED2相机,并详细解释了ZED2 ROS Wrapper的配置参数及其作用,包括视频参数、深度参数、位置跟踪参数等。
本文介绍如何在ROS环境中使用ZED2相机,并详细解释了ZED2 ROS Wrapper的配置参数及其作用,包括视频参数、深度参数、位置跟踪参数等。

国际惯例:Src https://github.com/stereolabs/zed-examples
查看本人系列文章了解ZED2 SDK in Linux build(CUDA 10.0 used): https://blog.csdn.net/hhaowang/article/details/115401380?spm=1001.2014.3001.5501
ZED2官方文档:https://www.stereolabs.com/docs/
目录
Parameters with prefix general
SENSORS PARAMETERS (ONLY ZED-M AND ZED 2)
OBJECT DETECTION PARAMETERS (ONLY ZED 2)
1. 安装zed-ros-wrapper依赖
项目地址 https://github.com/stereolabs/zed-ros-wrapper#build-the-program
Build the program
The zed_ros_wrapper is a catkin package. It depends on the following ROS packages:
- nav_msgs
- tf2_geometry_msgs
- message_runtime
- catkin
- roscpp
- stereo_msgs
- rosconsole
- robot_state_publisher
- urdf
- sensor_msgs
- image_transport
- roslint
- diagnostic_updater
- dynamic_reconfigure
- tf2_ros
- message_generation
- nodelet
编译zed_ros_wrapper包
$ cd ~/catkin_ws/src
$ git clone https://github.com/stereolabs/zed-ros-wrapper.git
$ cd ../
$ rosdep install --from-paths src --ignore-src -r -y
$ catkin_make -DCMAKE_BUILD_TYPE=Release
$ source ./devel/setup.bash简单测试:
ZED2 camera:
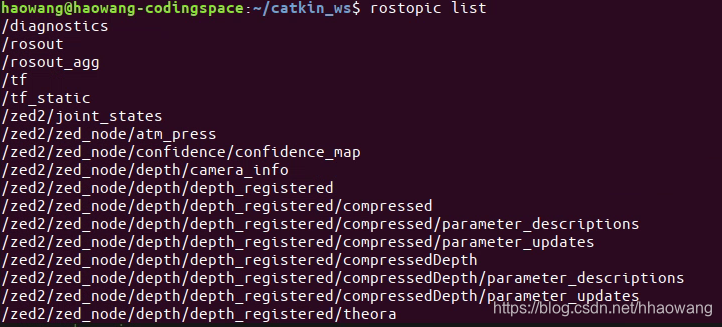
$ roslaunch zed_wrapper zed2.launch2 ZED2 wrapper 话题列表
查看节点信息

查看话题信息
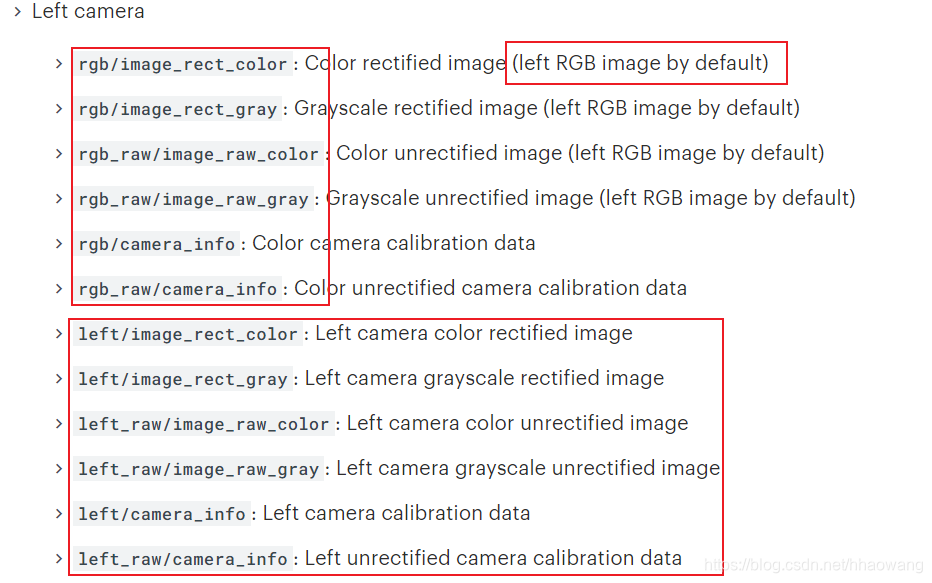
左相机发布话题列表
rgb_image相关话题默认以左相机数据帧发布
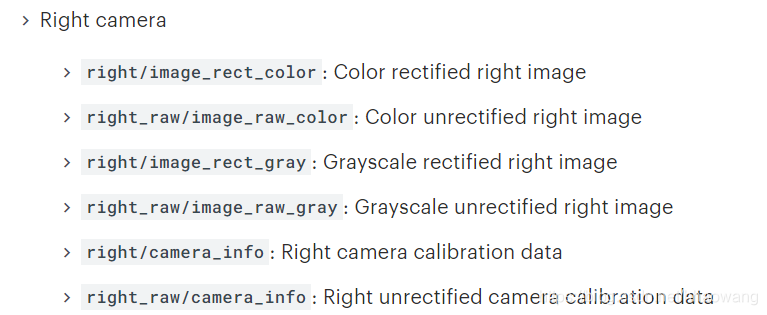
右相机话题
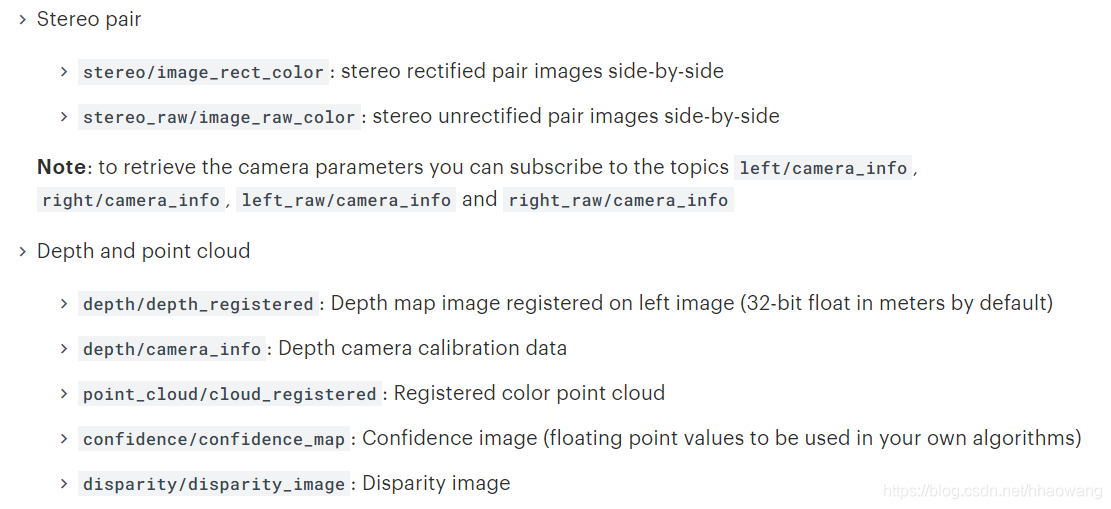
双目及深度话题
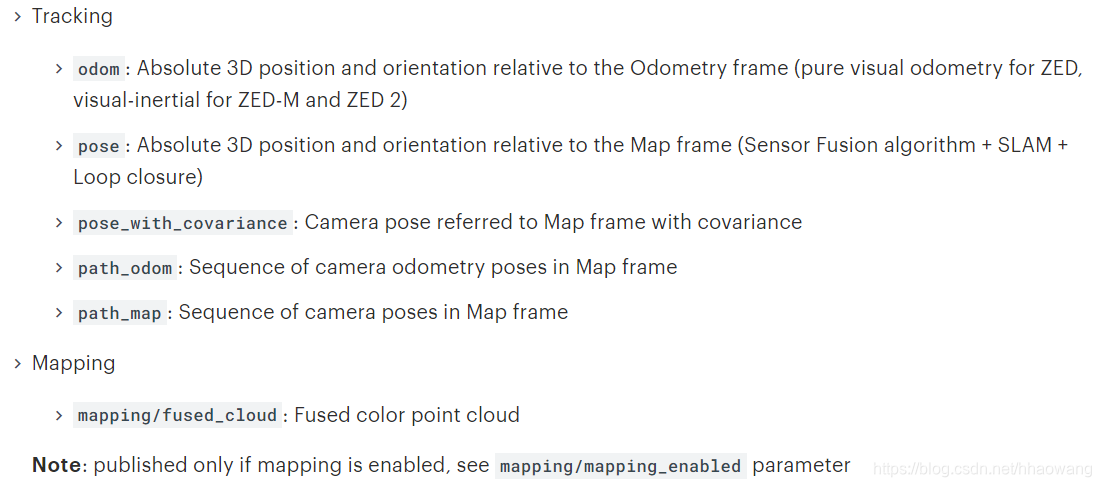
SLAM相关
(暂不考虑)
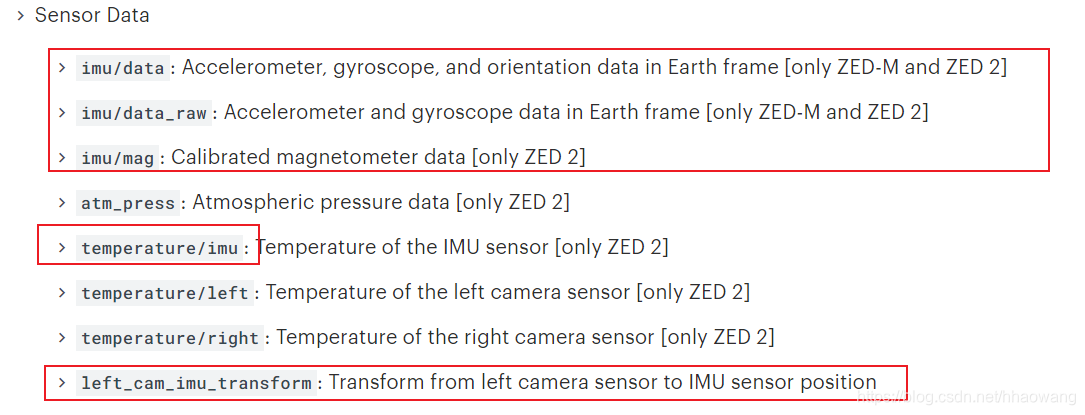
传感器数据发布话题
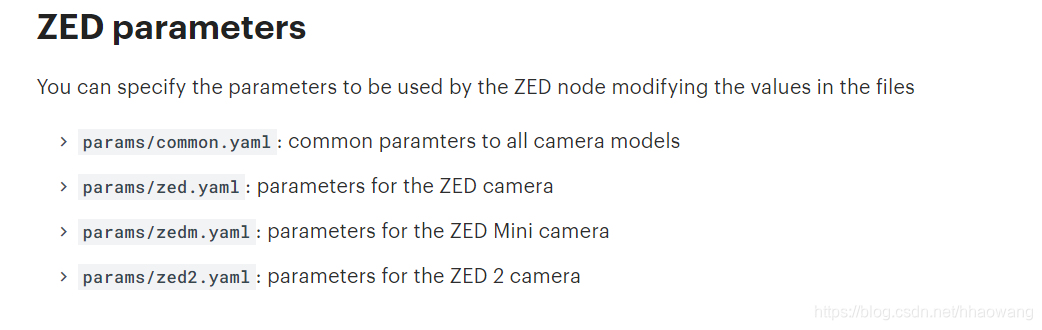
3. ZED参数服务器
# params/zed2.yaml
# Parameters for Stereolabs ZED2 camera
---
general:
camera_model: 'zed2'
depth:
min_depth: 0.7 # Min: 0.2, Max: 3.0 - Default 0.7 - Note: reducing this value wil require more computational power and GPU memory
max_depth: 20.0 # Max: 40.0
pos_tracking:
imu_fusion: true # enable/disable IMU fusion. When set to false, only the optical odometry will be used.
sensors:
sensors_timestamp_sync: false # Synchronize Sensors messages timestamp with latest received frame
publish_imu_tf: true # publish `IMU -> <cam_name>_left_camera_frame` TF
object_detection:
od_enabled: false # True to enable Object Detection [only ZED 2]
model: 0 # '0': MULTI_CLASS_BOX - '1': MULTI_CLASS_BOX_ACCURATE - '2': HUMAN_BODY_FAST - '3': HUMAN_BODY_ACCURATE
confidence_threshold: 50 # Minimum value of the detection confidence of an object [0,100]
max_range: 15. # Maximum detection range
object_tracking_enabled: true # Enable/disable the tracking of the detected objects
body_fitting: false # Enable/disable body fitting for 'HUMAN_BODY_FAST' and 'HUMAN_BODY_ACCURATE' models
mc_people: true # Enable/disable the detection of persons for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_vehicle: true # Enable/disable the detection of vehicles for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_bag: true # Enable/disable the detection of bags for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_animal: true # Enable/disable the detection of animals for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_electronics: true # Enable/disable the detection of electronic devices for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' models
mc_fruit_vegetable: true # Enable/disable the detection of fruits and vegetables for 'MULTI_CLASS_BOX' and 'MULTI_CLASS_BOX_ACCURATE' modelsParameters with prefix general
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| camera_name | A custom name for the ZED camera. Used as namespace and prefix for camera TF frames | string, default=zed |
| camera_model | Type of Stereolabs camera | zed: ZED, zedm: ZED-M, zed2: ZED 2 |
| camera_flip | Flip the camera data if it is mounted upsidedown | true, false |
| zed_id | Select a ZED camera by its ID. Useful when multiple cameras are connected. ID is ignored if an SVO path is specified | int, default 0 |
| serial_number | Select a ZED camera by its serial number | int, default 0 |
| resolution | Set ZED camera resolution | 0: HD2K, 1: HD1080, 2: HD720, 3: VGA |
| grab_frame_rate | Set ZED camera grabbing framerate | int |
| gpu_id | Select a GPU device for depth computation | int, default -1 (best device found) |
| base_frame | Frame_id of the frame that indicates the reference base of the robot | string, default=base_link |
| verbose | Enable/disable the verbosity of the SDK | true, false |
| svo_compression | Set SVO compression mode | 0: LOSSLESS (PNG/ZSTD), 1: H264 (AVCHD) ,2: H265 (HEVC) |
| self_calib | Enable/disable self calibration at starting | true, false |
VIDEO PARAMETERS
Parameters with prefix video
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| img_downsample_factor | Resample factor for images [0.01,1.0]. The SDK works with native image sizes, but publishes rescaled image. | double, default=1.0 |
| extrinsic_in_camera_frame | If false extrinsic parameter in camera_info will use ROS native frame (X FORWARD, Z UP) instead of the camera frame (Z FORWARD, Y DOWN) [true use old behavior as for version < v3.1] | true, false |
DEPTH PARAMETERS
Parameters with prefix depth
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| quality | Select depth map quality | 0: NONE, 1: PERFORMANCE, 2: MEDIUM, 3: QUALITY, 4: ULTRA |
| sensing_mode | Select depth sensing mode (change only for VR/AR applications) | 0: STANDARD, 1: FILL |
| depth_stabilization | Enable depth stabilization. Stabilizing the depth requires an additional computation load as it enables tracking | 0: disabled, 1: enabled |
| openni_depth_mode | Convert 32bit depth in meters to 16bit in millimeters | 0: 32bit float meters, 1: 16bit uchar millimeters |
| depth/depth_downsample_factor | Resample factor for depth data matrices [0.01,1.0]. The SDK works with native data sizes, but publishes rescaled matrices (depth map, point cloud, …) | double, default=1.0 |
| min_depth | Minimum value allowed for depth measures | Min: 0.3 (ZED) or 0.1 (ZED-M), Max: 3.0 - Note: reducing this value will require more computational power and GPU memory. In cases of limited compute power, increasing this value can provide better performance |
| max_depth | Maximum value allowed for depth measures | Min: 1.0, Max: 30.0 - Values beyond this limit will be reported as TOO_FAR |
POSITION PARAMETERS
Parameters with prefix pos_tracking
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| publish_tf | Enable/disable publish TF frames | true, false |
| publish_map_tf | Enable/disable publish map TF frame | true, false |
| map_frame | Frame_id of the pose message | string, default=map |
| odometry_frame | Frame_id of the odom message | string, default=odom |
| area_memory_db_path | Path of the database file for loop closure and relocalization that contains learnt visual information about the environment | string, default=`` |
| pose_smoothing | Enable smooth pose correction for small drift correction | 0: disabled, 1: enabled |
| area_memory | Enable Loop Closing | true, false |
| floor_alignment | Indicates if the floor must be used as origin for height measures | true, false |
| initial_base_pose | Initial reference pose | vector, default=[0.0,0.0,0.0, 0.0,0.0,0.0] -> [X, Y, Z, R, P, Y] |
| init_odom_with_first_valid_pose | Indicates if the odometry must be initialized with the first valid pose received by the tracking algorithm | true, false |
| path_pub_rate | Frequency (Hz) of publishing of the trajectory messages | float, default=2.0 |
| path_max_count | Maximum number of poses kept in the pose arrays (-1 for infinite) | int, default=-1 |
MAPPING PARAMETERS
Parameters with prefix mapping
Note: the mapping module requires SDK v2.8 or higher
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| mapping_enabled | Enable/disable the mapping module | true, false |
| resolution | Resolution of the fused point cloud [0.01, 0.2] | double, default=0.1 |
| max_mapping_range | Maximum depth range while mapping in meters (-1 for automatic calculation) [2.0, 20.0] | double, default=-1 |
| fused_pointcloud_freq | Publishing frequency (Hz) of the 3D map as fused point cloud | double, default=1.0 |
SENSORS PARAMETERS (ONLY ZED-M AND ZED 2)
Parameters with prefix sensors
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| sensors_timestamp_sync | Synchronize Sensors message timestamp with latest received frame | true, false |
OBJECT DETECTION PARAMETERS (ONLY ZED 2)
Parameters with prefix object_detection
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| od_enabled | Enable/disable the Object Detection module | true, false |
| confidence_threshold | Minimum value of the detection confidence of an object | int [0,100] |
| object_tracking_enabled | Enable/disable the tracking of the detected objects | true, false |
| people_detection | Enable/disable the detection of persons | true, false |
| vehicle_detection | Enable/disable the detection of vehicles | true, false |
Dynamic parameters
The ZED node lets you reconfigure these parameters dynamically:
| PARAMETER | DESCRIPTION | VALUE |
|---|---|---|
| general/pub_frame_rate | Frequency of the publishing of Video and Depth images (equal or minor to grab_frame_rate value) | float [0.1,100.0] |
| depth/depth_confidence | Threshold to reject depth values based on their confidence. Each depth pixel has a corresponding confidence. A lower value means more confidence and precision (but less density). An upper value reduces filtering (more density, less certainty). A value of 100 will allow values from 0 to 100. (no filtering). A value of 90 will allow values from 10 to 100. (filtering lowest confidence values). A value of 30 will allow values from 70 to 100. (keeping highest confidence values and lowering the density of the depth map). The value should be in [1,100]. By default, the confidence threshold is set at 100, meaning that no depth pixel will be rejected. | int [0,100] |
| depth/depth_texture_conf | Threshold to reject depth values based on their textureness confidence. A lower value means more confidence and precision (but less density). An upper value reduces filtering (more density, less certainty). The value should be in [1,100]. By default, the confidence threshold is set at 100, meaning that no depth pixel will be rejected. | int [0,100] |
| depth/point_cloud_freq | Frequency of the pointcloud publishing (equal or minor to frame_rate value) | float [0.1,100.0] |
| video/brightness | Defines the brightness control | int [0,8] |
| video/contrast | Defines the contrast control | int [0,8] |
| video/hue | Defines the hue control | int [0,11] |
| video/saturation | Defines the saturation control | int [0,8] |
| video/sharpness | Defines the sharpness control | int [0,8] |
| video/gamma | Defines the gamma control | int [1,9] |
| video/auto_exposure_gain | Defines if the Gain and Exposure are in automatic mode or not | true, false |
| video/gain | Defines the gain control [only if auto_exposure_gain is false] | int [0,100] |
| video/exposure | Defines the exposure control [only if auto_exposure_gain is false] | int [0,100] |
| video/auto_whitebalance | Defines if the White balance is in automatic mode or not | true, false |
| video/whitebalance_temperature | Defines the color temperature value (x100) | int [42,65] |
To modify a dynamic parameter, you can use the GUI provided by the rqt stack:
$ rosrun rqt_reconfigure rqt_reconfigure

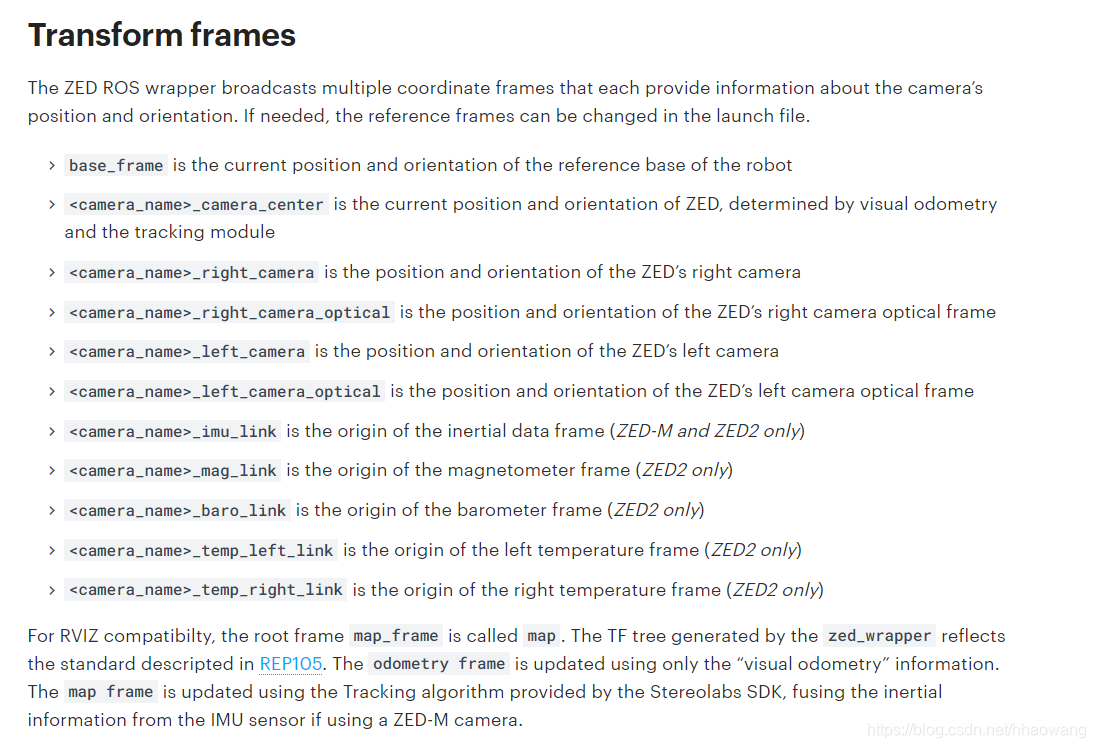
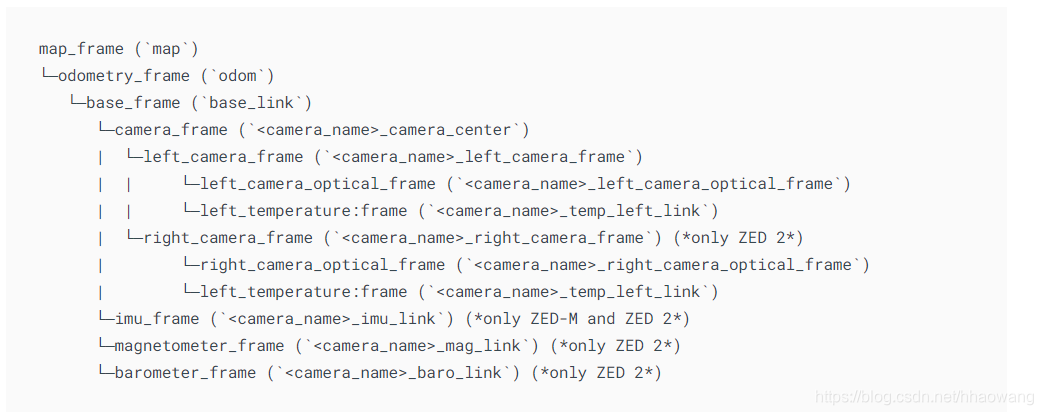
4. ZED TF


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











