







目录
1.5 essential graph 和 full BA 结果对比
本周课程重点:
1.
掌握关键帧、共视图、扩展树、本质图的原理(重要)。
2.
掌握本质图优化原理和代码(重要)。
3.
理解
EPnP
的原理(重要),能看懂推导过程。
1 共视图 本质图 拓展树原理
1.1 关键帧、共视图、扩展树、本质图的区别

1.2 共视图 (Covisibility Graph)
共视图是无向加权图,每个节点是关键帧,如果两个关键帧之间满足一定的共视关系(
至少15个共同观测地图点
)他们就连成一条边,边的权重就是共视地图点数目;
共视图的作用:
1.3 本质图(Essential Graph)
共视图比较稠密,本质图比共视图更稀疏,这是因为本质图的作用是用在闭环矫正时,用相似变换来矫 正尺度漂移,把闭环误差均摊在本质图中。本质图中节点也是所有关键帧,但是连接边更少,只保留了 联系紧密的边来使得结果更精确。本质图中包含:
1. 扩展树连接关系
2. 形成闭环的连接关系,闭环后地图点变动后新增加的连接关系
3. 共视关系非常好(至少100个共视地图点,条件苛刻。所以比共视图稀疏)的连接关系
1.4 扩展树(spanning tree)
子关键帧和父关键帧构成

1.5 essential graph 和 full BA 结果对比
从结果来看,
1
、全局
BA
存在收敛问题。即使迭代
100
次,相对均方误差
RMSE
也比较高
2
、
essential graph
优化可以快速收敛并且结果更精确。
θ
min
表示被选为
essential graph
至少需要的共视地图点数目,从结果来看,θ
min
的大小对精度影响不大,但是较大的
θmin值可以显著减少运行时间(因为本质图少,条件苛刻)
3
、
essential graph
优化 后增加全局
full BA
可以提升精度(但比较有限),但是会耗时较多


1.6 计算Sim3函数ComputeSim3
LoopClosing::ComputeSim3()
里查找
vpLoopConnectedKFs
,
mvpLoopMapPoints

2 全网最详细的EPnP 算法原理详解
2.1 背景介绍
论文:
Lepetit V , Fua M N . EPnP: An Accurate O(n) Solution to the PnP Problem[J]. International Journal of
Computer Vision, 2009.
输入:
1. n个世界坐标系下的3D点,论文中称为3D参考点
2. 这 个3D点投影在图像上的2D坐标
3. 相机内参矩阵 ,包括焦距和主点
输出:
相机的位姿 R,t
应用:特征点的图像跟踪,需要实时处理有噪声的特征点,对计算精度和效率要求比较高,只需
4
对匹配 点即可求解。
2.2 算法的优点:
1. 只需要4对非共面点,对于平面只需要3对点
2. 闭式解,不需要迭代,不需要初始估计值。
3. 精度比较高。和迭代法里精度最高的方法LHM方法精度相当。
4. 比较鲁棒,可以处理带噪声的数据。迭代法受到初始估计的影响比较大,会不稳定
5. 线性计算复杂度为O(n)
6. 平面和非平面都适用


原理和步骤:
我们目前知道 n个世界坐标系下的
3D
点及其在图像上的
2D
投影点,还有相机内参,目的是为了求世界坐标系到相机坐标系下的位姿变换 R, t;
EPnP
的思路就是先把
2D图像点通过内参变换到相机坐标系下的3D
点,然后用
ICP
来求解
3D-3D
的变换就得到了位姿。那么问题的核心就转化为如何通过2D
信息,加上一些约束,来得到相机坐标系下的
3D
点。 因为我们这里的位姿变换是欧式空间下的刚体变换,所以点之间的相对距离信息在不同坐标系下是不变 的。我们称之为刚体结构不变性
。后面就是紧紧围绕这个特性来求解的。
1.
首先我们对
3D
点的表达方式进行了新的定义。之前不管是世界坐标系还是相机坐标系下的
3D
点,它们都是相对于自己坐标系下的原点的。那么两个坐标系原点不同,坐标的量级可能差异非常大,比如相机坐标系下3D
点坐标范围可能是
10-100
之间,世界坐标系下坐标可能是
1000-10000
之间,这对求解优化都是不利的。所以我们要统一一下量级。可以理解为归一化吧,这在求基础矩阵、单应矩阵时都是常规手段。(
归一化的原因
)
具体来说,我们对每个坐标系定义
4
个控制点
,其中一个是质心(
也就是各个方向均值
),其他
3
个用PCA
从三个主方向选取,这
4
个控制点可以认为是参考基准,类似于坐标系里的基。所有的
3D
点都表达为这4
个参考点的线性组合。这些系数我们称之为权重,为了不改变数据的相对距离,权重和必须为1
。这样,我们就可以
用世界坐标系或相机坐标系下的
4
个控制点表示所有的世界坐标系或
相近坐标系下的
3D
点。
2.
利用投影方程将图像
2D
点恢复相机坐标系下
3D
点(未知量)。经过整理后,一组点对可以得到
2
个方程。我们待求的相机坐标系下3D
点对应的
4
个控制点,每个控制点
3
个分量,总共
12
个未知数组成的一个向量。
3.
用
SVD
分解可以求解上述向量,但是因为恢复的相机坐标系下
3D
点还有个
尺度因子
, 这里我们根据结构信息不变性作为约束,求解。
4. 最后用高斯牛顿法优化上述求解的
 。
。
注:
ORB-SLAM
里使用的
EPnP
是直接拷贝
OpenCV
里的源码:
modules
→
calib3d
→
src
→
epnp.cpp
统一变量格式:

4
个控制点系数 ,也就是论文中的homogeneous barycentric coordinates,我们翻译为齐次重心坐标。
同一
3D
点在世界坐标系下和相机坐标系下的控制点系数相
同
。后面会给出证明
2.3 控制点如何选取?
理论上,控制点的坐标可以任意选取。但在实践中,作者发现了一种可以提高结果稳定性的控制点选择 方法。具体如下

将剩余的3个控制点表示为:
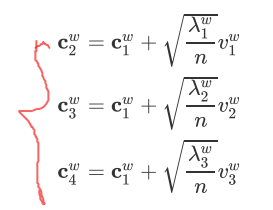
2.4 计算控制点系数,用控制点重新表达数据
我们将世界坐标系下
3D
点的坐标表示为对应控制点坐标的线性组合:


那么,世界坐标系下控制点的系数可以这样计算得到

口说无凭,我们来推导一下,假设待求的相机位姿为
T
,那么

2.5 透视投影关系构建约束



求解

如何确定 ?
因为每个点对可以得到
2
个约束方程,总共有
12
个未知数,所以如果有
6组点对,我们就能直接求解,此时 N=1。如果相机的焦距逐渐增大,相机模型更趋近于使用正交相机代替透视相机,零空间的自由度就会增加到 N=4 。
我们来看论文中这张图:
横坐标表示通过MTM 特征值分解得到的12
个特征值的序号,纵坐标表示对应特征值的大小。 当焦距 f =100 时,我们看局部放大的右图,只有1
个特征值是
0
,所以只要用最后一个特征向量就可以 了。
当焦距f =1000 时,右图中可以看到第9,10,11,12个特征值都是
0
,也就是说只用最后一个特征向量是 没有办法表示的,要用到最后4个特征值对应的特征向量加权才行,这就是最大N=4 的来源。













分别求偏导后得到

高斯牛顿法的增量方程:
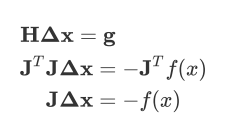
![]()
2.6 ICP 求解位姿


3、总结


参考
Lepetit V , Fua M N . EPnP: An Accurate O(n) Solution to the PnP Problem[J]. International Journal
of Computer Vision, 2009.
小葡萄
https://zhuanlan.zhihu.com/p/59070440
Jessie
https://blog.csdn.net/jessecw79/article/details/82945918
代码:
https://github.com/cvlab-epfl/EPnP
















 590
590











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











