










背景
当圆弧覆盖的角度小于90度时,使用最小二乘拟合或者taubin拟合出的圆会偏小,从而使拟合出的圆心与实际偏差过大。
原理
在已知圆弧的理论半径时,可以将圆半径作为一个约束,拟合圆心。
固定半径的圆拟合可以看做以下优化问题:

求u函数最小时,a和b的取值。
u分别对a和b求偏导,
当
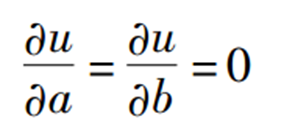
时,u取最小值。
即需要解以下二元非线性方程。
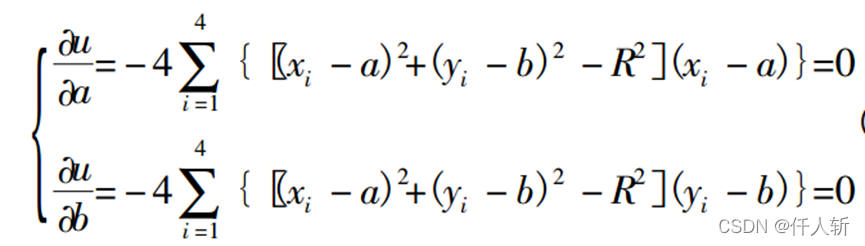
由于该方程没有解析解,所以需要使用牛顿法迭代得到数值解。
代码
针对多元函数求最小值问题,可以使用GSL数学运算库。
编码实现如下:
#include <iostream>
#include <vector>
#include <math.h>
#include <iostream>
#include <fstream>
#include <gsl/gsl_vector.h>
#include <gsl/gsl_multimin.h>
using namespace std;
#define PI (3.1415927f)
struct POINT
{
double x;
double y;
};
struct fitParam
{
vector<POINT> points;
double radius;
};
bool circleLeastFit(const std::vector<POINT> &points, double ¢er_x, double ¢er_y, double &radius)
{
center_x = 0.0f;
center_y = 0.0f;
radius = 0.0f;
if (points.size() < 3)
{
return false;
}
double sum_x = 0.0f, sum_y = 0.0f;
double sum_x2 = 0.0f, sum_y2 = 0.0f;
double sum_x3 = 0.0f, sum_y3 = 0.0f;
double sum_xy = 0.0f, sum_x1y2 = 0.0f, sum_x2y1 = 0.0f;
int N = points.size();
for (int i = 0; i < N; i++)
{
double x = points[i].x;
double y = points[i].y;
double x2 = x * x;
double y2 = y * y;
sum_x += x;
sum_y += y;
sum_x2 += x2;
sum_y2 += y2;
sum_x3 += x2 * x;
sum_y3 += y2 * y;
sum_xy += x * y;
sum_x1y2 += x * y2;
sum_x2y1 += x2 * y;
}
double C, D, E, G, H;
double a, b, c;
C = N * sum_x2 - sum_x * sum_x;
D = N * sum_xy - sum_x * sum_y;
E = N * sum_x3 + N * sum_x1y2 - (sum_x2 + sum_y2) * sum_x;
G = N * sum_y2 - sum_y * sum_y;
H = N * sum_x2y1 + N * sum_y3 - (sum_x2 + sum_y2) * sum_y;
a = (H * D - E * G) / (C * G - D * D);
b = (H * C - E * D) / (D * D - G * C);
c = -(a * sum_x + b * sum_y + sum_x2 + sum_y2) / N;
center_x = a / (-2);
center_y = b / (-2);
radius = sqrt(a * a + b * b - 4 * c) / 2;
return true;
}
double L1_distance(const gsl_vector * v, void * params)
{
fitParam *param = (fitParam*)params;
int N = param->points.size();
double a, b, r;
a = gsl_vector_get(v, 0);
b = gsl_vector_get(v, 1);
r = param->radius;
double sum = 0;
for (int i = 0; i < N; i++)
{
const POINT p = param->points[i];
double xi = p.x - a;
double yi = p.y - b;
double dist = sqrt(xi * xi + yi * yi) - r;
sum += fabs(dist);
}
return sum;
}
void CircleFitFixRadius(const fitParam ¶m,double ¢er_x,double ¢er_y)
{
gsl_multimin_function function;
gsl_multimin_fminimizer * fminimizer;
gsl_vector *start_point; // 迭代初始值
gsl_vector *step_size; // 迭代步长
int max_iter = 100; // 默认最大迭代 100 步
function.n = 2;
function.f = L1_distance;
function.params = (void *)¶m;
start_point = gsl_vector_alloc(function.n);
step_size = gsl_vector_alloc(function.n);
fminimizer = gsl_multimin_fminimizer_alloc(gsl_multimin_fminimizer_nmsimplex, function.n);
gsl_vector_set(start_point, 0, center_x);
gsl_vector_set(start_point, 1, center_y);
gsl_vector_set(step_size, 0, 1);
gsl_vector_set(step_size, 1, 1);
gsl_multimin_fminimizer_set(fminimizer, &function, start_point, step_size);
int iter = 0;
int status;
do
{
iter++;
status = gsl_multimin_fminimizer_iterate(fminimizer);
if (status == GSL_ENOPROG) // 表示无法找到更好的解了
{
break;
}
double size = gsl_multimin_fminimizer_size(fminimizer);
status = gsl_multimin_test_size(size, 1e-2);
} while (status == GSL_CONTINUE && iter < max_iter);
gsl_vector * out = gsl_multimin_fminimizer_x(fminimizer);
center_x = gsl_vector_get(out, 0);
center_y = gsl_vector_get(out, 1);
}
int main()
{
fitParam param;
vector<POINT> points;
ofstream outfile("out.txt", ios::trunc);
double R0 = 45.0;
double X0 = 0;
double Y0 = 0;
//生成1/8圆
for (int i = 22; i < 67; i++)
{
POINT p;
p.x = X0 + R0 * cos(i / 180.0*PI) + (rand() % 1000 - 500) / 1000.0;
p.y = Y0 + R0 * sin(i / 180.0*PI) + (rand() % 1000 - 500) / 1000.0;
param.points.push_back(p);
outfile << p.x << " " << p.y << endl;
}
outfile.close();
ofstream outfileR("outR.txt", ios::trunc);
//使用最小二乘拟合不带半径约束
double xc, yc, rc;
circleLeastFit(param.points, xc, yc, rc);
std::cout << "X:" <<xc << ",Y:" << yc << ",R:" << rc << endl;
outfileR << xc << " " << yc << " " << rc << endl;
//将最小二乘得到结果作为迭代算法初始值,半径使用理论值
param.radius = R0;
CircleFitFixRadius(param, xc, yc);
std::cout << "X:" << xc << ",Y:" << yc << endl;
outfileR << xc << " " << yc << " " << param.radius << endl;
outfileR.close();
return 0;
}
需要注意的是,针对短圆弧,有可能陷入局部最优,所以要选取一个好的迭代初值。
本文的方法是先使用最小二乘拟合出大概的半径和圆心位置。然后半径用理论半径替换,作为优化的迭代初值。
效果
使用MATLAB分析结果
close all
clear
load('out.txt')
x = out(:,1);
y = out(:,2);
plot(x,y,".k")
hold on
grid on
load('outR.txt')
x1 = outR(1,1);
y1 = outR(1,2);
R = outR(1,3);
rectangle('position',[x1-R,y1-R,R*2,R*2],'curvature',[1,1],'EdgeColor','r','LineStyle','--');
plot(x1,y1,"*r");
x1 = outR(2,1);
y1 = outR(2,2);
R = outR(2,3);
rectangle('position',[x1-R,y1-R,R*2,R*2],'curvature',[1,1],'EdgeColor','b','LineStyle','-');
plot(x1,y1,"*b");
legend('拟合点','最小二乘拟合圆心','理论半径拟合圆心');
执行效果如下:
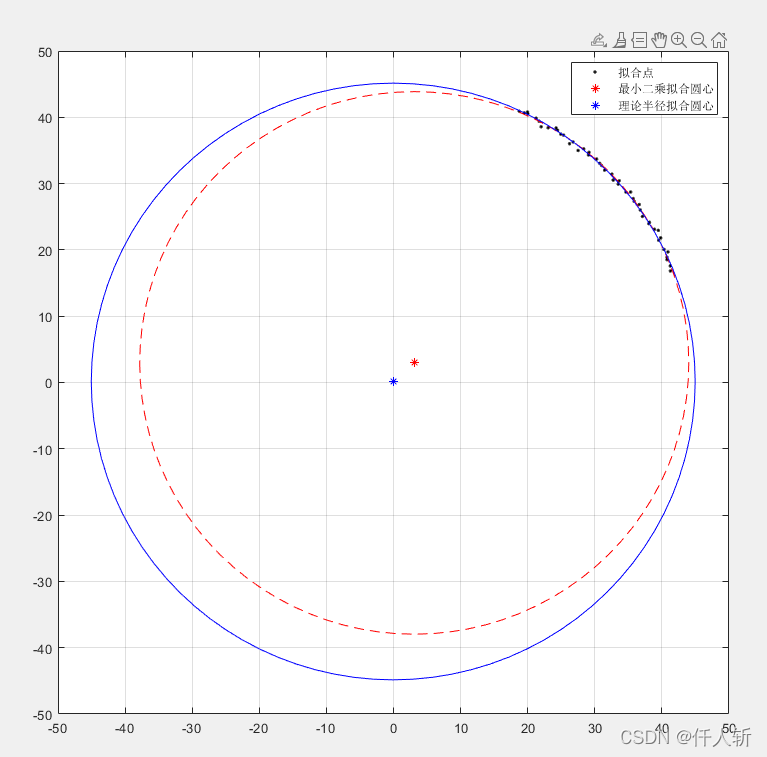
可以看到在1/8圆时,仍能得到较好的结果。
















 210
210











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











