







导航中总是涉及哥氏定理
哥氏定理基础回顾
科里奥利定理,简称哥氏定理,常用于坐标系间速度、加速度的变换。
请看基础科里奥利力、科里奥利力原理。
定理中所用的变量定义
V
α
动
点
相
对
于
静
坐
标
系
运
动
的
速
度
V_\alpha动点相对于静坐标系运动的速度
Vα动点相对于静坐标系运动的速度
V
r
表
示
动
点
相
对
于
动
坐
标
系
的
速
度
V_r表示动点相对于动坐标系的速度
Vr表示动点相对于动坐标系的速度
V
e
表
示
某
瞬
时
牵
连
点
相
对
于
静
坐
标
系
运
动
的
速
度
V_e表示某瞬时牵连点相对于静坐标系运动的速度
Ve表示某瞬时牵连点相对于静坐标系运动的速度
a
α
动
点
相
对
于
静
坐
标
系
运
动
的
加
速
度
a_\alpha动点相对于静坐标系运动的加速度
aα动点相对于静坐标系运动的加速度
a
r
动
点
相
对
于
动
坐
标
系
运
动
的
加
速
度
a_r动点相对于动坐标系运动的加速度
ar动点相对于动坐标系运动的加速度
a
e
某
瞬
时
牵
连
点
相
对
于
静
坐
标
系
运
动
的
加
速
度
a_e某瞬时牵连点相对于静坐标系运动的加速度
ae某瞬时牵连点相对于静坐标系运动的加速度
哥氏定理个人理解
科里奥利力是研究运动中的三个物体之间的动静关系:假设地球是静止的,以地球中心为中心建立地球坐标系,再以海面上航行的船建立一个船体(机体坐标系),船上的人在走动,则人就相当于是一个动点。科里奥利力是人们假想的力,就相当于离心力一样。地球坐标系是静止系,船体坐标为动系;那么人在船上走相对于船就有相对运动、速度、加速度、角速度,相对于地球就有绝对运动、绝对速度、绝对加速度、绝对角速度等;船体相对于地球的速度就有牵连运动、牵连速度、牵连加速度、牵连角速度等。
牵连点的概念就是人在船上走,人是动点,相对于船体坐标系动点对应在船体坐标系上的点就相当于是牵连点,不太正确形象的理解就是人走到船的那个位置,那个位置就是牵连点,牵连点一直伴随着动点的变化而变化。
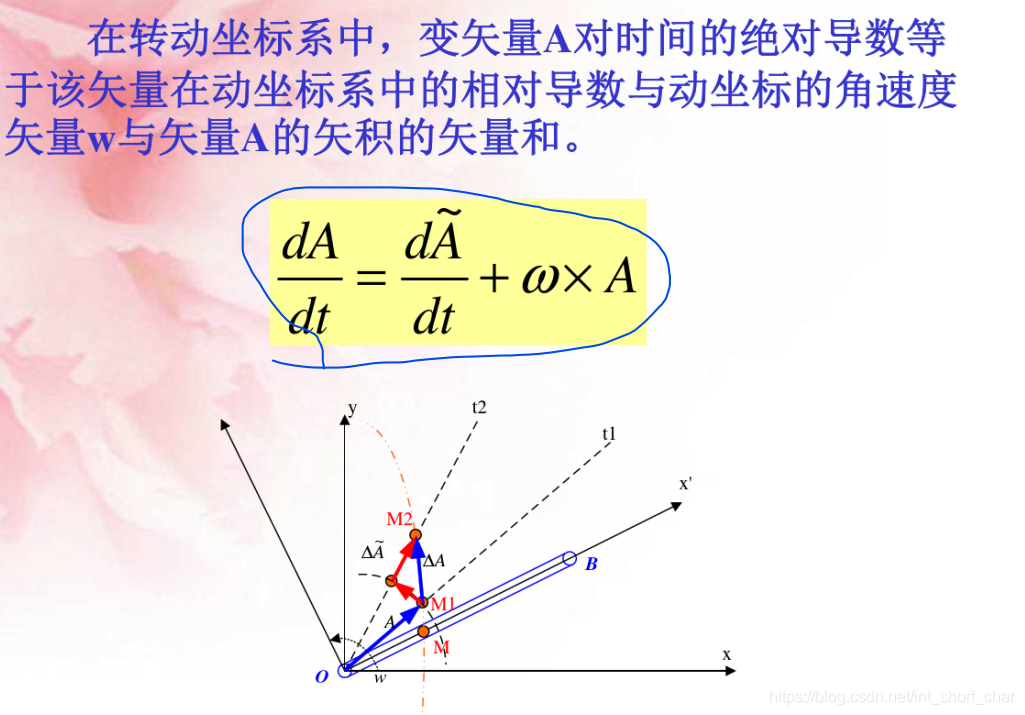
公式计算
如下图是两个坐标系
X
O
Y
XOY
XOY以及
X
′
O
Y
′
X'OY'
X′OY′直管
O
B
OB
OB匀速绕着
O
O
O点转动直管
O
B
OB
OB上有一个动点M过
t
1
t_1
t1时刻转到了
M
1
M_1
M1位置
t
2
t_2
t2时刻转到了
M
2
M_2
M2位置。可以看到动点的实际运动是两个运动的合成,就是
O
B
OB
OB直管转动和动点
M
M
M沿着
O
B
OB
OB运动而产生的符合运动。假设直管转速为
ω
\omega
ω
则:
V
e
1
=
O
M
×
ω
V_{e1} = OM\times \omega
Ve1=OM×ω
V
e
2
=
O
M
×
ω
V_{e2} = OM\times \omega
Ve2=OM×ω

从上图中可以看到动点的绝对运动速度等于相对运动速度和牵连运动速度的 矢量和
·
(1)
矢量表示角速度和角加速度
如下图中:绕着定轴
Z
Z
Z转动的角速度可以使用矢量来表示,用矢量表示的好处就是可以确定大小还有方向。
如图可以看出:
`
(2)
我们可以看到其方向如图,定轴为 Z Z Z轴去 Z Z Z轴的单位向量 k \pmb{k} kkk
`
(3)
同样的加速度也可以表示为:
`
(4)

用矢量表示速度和加速度
动点速度和加速度表示
如下图所示:
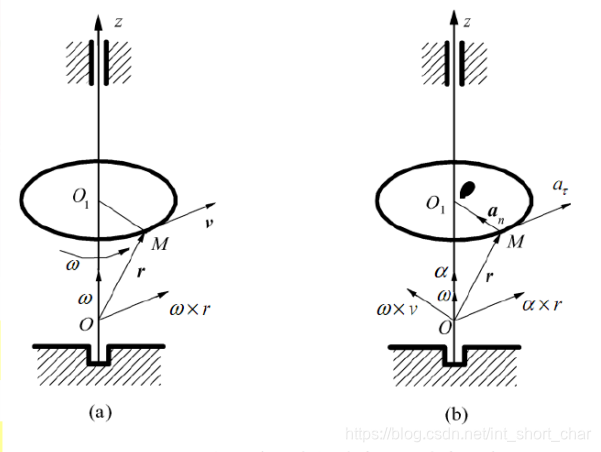
M
M
M为定轴旋转刚体上的任意一点,其速度为
V
V
V,在转轴上任取一点
O
O
O作矢径
ω
\pmb{\omega}
ωωω,图中
M
M
M点的加速度可以分解为两个方向,一个是沿着圆的切线方向称为切向加速度,另一个为指向圆心的法向加速度,法向加速度
a
n
=
F
n
m
=
4
∗
π
2
∗
R
T
2
=
4
∗
π
2
∗
R
∗
f
2
=
v
2
R
=
ω
×
v
\pmb{a_n} = \tfrac{F_n}{m} = \tfrac{4*π^2* R}{T^2}=4* π^2*R*f^2 = \tfrac{v^2}{R} =\pmb \omega \times \pmb v
ananan=mFn=T24∗π2∗R=4∗π2∗R∗f2=Rv2=ωωω×vvv.
·
(5)
对速度求导的加速度:
·
(6)
式中第一部分 ε × r \varepsilon \times r ε×r为切向加速度,第二部分 ω × v \omega \times v ω×v为法向加速度
牵连速度和加速度
当动坐标系平移时:
·
·
(7)
当动坐标系定轴转动时:
·
(8)
·
(9)
加速度的合成
当动坐标系平移时:
绝对加速度等于牵连加速度与相对加速度的矢量和:
·
(10)
矢量的绝对变化率
由图可看出绝对导数是大于矢量的相对导数:绝对导数是相对导数和
O
B
OB
OB直管的角速度矢量与矢量A的和.

可以进一步得到:
则动点的加速度为:
`
(11)
变矢量
A
A
A对时间的绝对导数等于该矢量在动坐标系中的相对导数与动坐标的角速度矢量
ω
\omega
ω 与矢量
A
A
A的矢积的矢量和
`
(12)
牵连运动为定轴转动时:
即牵连轴转动,动点运动,需要计算绝对加速度: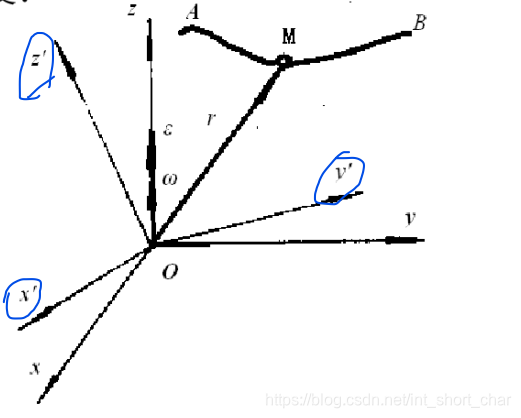
根据(1)式和(8)式可以得到:
·
(13)
然后对(13)式两边求导的加速度:
`
(14)
由(12)可知矢径
r
r
r对时间的导数等于动坐标系中的相对导数与动坐标的角速度矢量
ω
\omega
ω 与矢量
r
r
r的矢积的矢量:
`
(15-1)
`
(15-2)
在(15-1)式子中卡了很久,开始误认为 d v ~ r d t \tfrac{d\widetilde{v}_r}{dt} dtdv r这个表示的是动坐标系相对于静坐标系的速度一直在思考这个怎么可以这样转换想半天原来是我自己大意了。是表示动点相对于动坐标系的速度。
将(15)式带入(14)中可以的到:
`
·
·
·
(16)
则有科里奥利加速度:
`
科里奥利力:
`
点的加速度和成定理:
`
第一次使用markdown方式写文章很多地方还不会也不熟练效率很低,最后还以个问题请教各位大牛:
(1)想问下csdn 将向量加粗的方式 \pmb 怎么有些地用(比如分数形式)出现字符重影怎么解决?。
(2)有没有什么高效的数学公式编写方式,比如说弄个函数啥的让公式书写更加方便
参看文章:
【1】 惯导1-哥氏定理理解
【2】哥氏定理与科里奥利力
【3】哥氏定理与科里奥利力
[注]:本文中很多向量都没有使用加粗的方式请谅解,知道解决方式后随即更改,其他有误之处还请指正,谢谢!

















 1822
1822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









