






navigation2 的仿真一般用 turtlebot3_waffle.urdf 模型,waffle 模型是差速轮模型,找了段时间找不到 turtlebot3 的阿克曼底盘机器,就自己造了一个模型。
gazebo 的阿克曼底盘驱动插件
查看 turtlebot3 的 waffle.model 文件知道 gazebo 有一个差速轮底盘的驱动插件叫 libgazebo_ros_diff_drive.so,可以直接接收 ros 的 cmd_vel 话题来驱动底盘模型。有差速轮驱动插件,那就应该有阿克曼驱动插件,一番折腾后在 gazebo 插件文档 中找到资料。
阿克曼的驱动插件叫 libgazebo_ros_ackermann_drive.so。参考单车模型,该驱动是后轮驱动,前轮控制航向的控制。
官方的 libgazebo_ros_ackermann_drive 配置 demo 如下:
<plugin name="gazebo_ros_ackermann_drive" filename="libgazebo_ros_ackermann_drive.so">
<ros>
<namespace>demo</namespace>
<remapping>cmd_vel:=cmd_demo</remapping>
<remapping>odom:=odom_demo</remapping>
<remapping>distance:=distance_demo</remapping>
</ros>
<update_rate>100.0</update_rate>
<!-- wheels -->
<front_left_joint>front_left_wheel_joint</front_left_joint>
<front_right_joint>front_right_wheel_joint</front_right_joint>
<rear_left_joint>rear_left_wheel_joint</rear_left_joint>
<rear_right_joint>rear_right_wheel_joint</rear_right_joint>
<left_steering_joint>front_left_steer_joint</left_steering_joint>
<right_steering_joint>front_right_steer_joint</right_steering_joint>
<steering_wheel_joint>steering_joint</steering_wheel_joint>
<!-- Max absolute steer angle for tyre in radians-->
<!-- Any cmd_vel angular z greater than this would be capped -->
<max_steer>0.6458</max_steer>
<!-- Max absolute steering angle of steering wheel -->
<max_steering_angle>7.85</max_steering_angle>
<!-- Max absolute linear speed in m/s -->
<max_speed>20</max_speed>
<!-- PID tuning -->
<left_steering_pid_gain>1500 0 1</left_steering_pid_gain>
<left_steering_i_range>0 0</left_steering_i_range>
<right_steering_pid_gain>1500 0 1</right_steering_pid_gain>
<right_steering_i_range>0 0</right_steering_i_range>
<linear_velocity_pid_gain>1000 0 1</linear_velocity_pid_gain>
<linear_velocity_i_range>0 0</linear_velocity_i_range>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<publish_distance>true</publish_distance>
<odometry_frame>odom_demo</odometry_frame>
<robot_base_frame>chassis</robot_base_frame>
</plugin>模型效果
先看模型和底盘驱动效果,后面再提供方法。
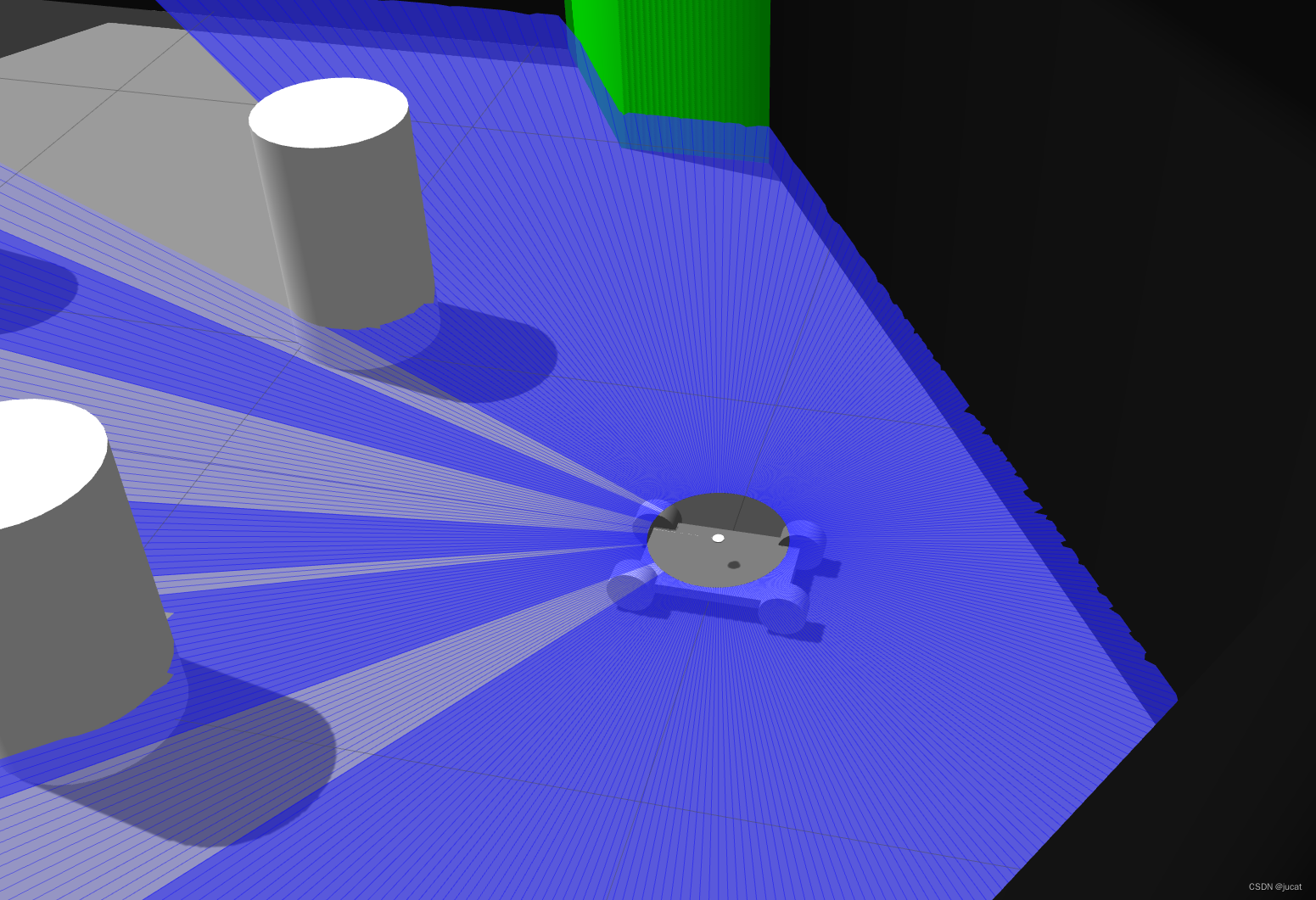
在终端发布 cmd_vel 话题:
ros2 topic pub --rate 1 /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.1, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.2}}"底盘收到话题后驱动小车向左作弧形行驶
目录结构:
注意:
urdf 模型是 rviz 中显示以及 ros 中使用的模型语言,model 是 gazebo 中使用的模型语言,语法略有区别
racecar.urdf 文件
<?xml version="1.0" ?>
<robot name="racecar">
<!-- base footprint -->
<link name="base_footprint"/>
<!-- base_link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.04"/>
<geometry>
<box size="0.1 0.1 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.04"/>
<geometry>
<box size="0.1 0.1 0.02"/>
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0.04"/>
<mass value="100"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0 0 0.04" rpy="0 0 0"/>
</joint>
<!-- left front wheel link -->
<link name="left_front_wheel">
<inertial>
<mass value="1.0"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<parent link="left_front_axle"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.13 0.08 0.04"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_front_axle">
<inertial>
<origin xyz="0.13 0.08 0.04" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="left_steering_joint" type="continuous">
<parent link="left_steering"/>
<child link="left_front_axle"/>
<origin rpy="0 0 0" xyz="0.13 0.08 0.05"/>
<axis xyz="0 0 1"/>
</joint>
<link name="left_steering">
<inertial>
<origin xyz="0.13 0.08 0.05" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="left_joint" type="fixed">
<parent link="base_link"/>
<child link="left_steering"/>
<origin rpy="0 0 0" xyz="0.13 0.08 0.05"/>
</joint>
<!-- right front wheel link -->
<link name="right_front_wheel">
<inertial>
<mass value="1.0"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<parent link="right_front_axle"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.13 -0.08 0.04"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_front_axle">
<inertial>
<origin xyz="0.13 -0.08 0.04" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="right_steering_joint" type="continuous">
<parent link="right_steering"/>
<child link="right_front_axle"/>
<origin rpy="0 0 0" xyz="0.13 -0.08 0.05"/>
<axis xyz="0 0 1"/>
</joint>
<link name="right_steering">
<inertial>
<origin xyz="0.13 -0.08 0.05" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="right_joint" type="fixed">
<parent link="base_link"/>
<child link="right_steering"/>
<origin rpy="0 0 0" xyz="0.13 -0.08 0.05"/>
</joint>
<!-- left rear wheel link -->
<link name="left_rear_wheel">
<inertial>
<mass value="1.0"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="left_rear_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="left_rear_wheel"/>
<origin rpy="0 0 0" xyz="-0.13 0.08 0.04"/>
<axis xyz="0 1 0"/>
</joint>
<!-- right rear wheel link -->
<link name="right_rear_wheel">
<inertial>
<mass value="1.0"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
<joint name="right_rear_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="right_rear_wheel"/>
<origin rpy="0 0 0" xyz="-0.13 -0.08 0.04"/>
<axis xyz="0 1 0"/>
</joint>
<!-- imu -->
<link name="imu_link"/>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="0.0 0 0.04" rpy="0 0 0"/>
</joint>
<!-- scan -->
<joint name="scan_joint" type="fixed">
<parent link="base_link"/>
<child link="base_scan"/>
<origin xyz="0 0 0.1" rpy="0 0 0"/>
</joint>
<link name="base_scan">
<inertial>
<mass value="0.125" />
<origin xyz="0 0 0.1" />
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" />
</inertial>
</link>
</robot>
racecar.model 文件
<?xml version="1.0"?>
<sdf version="1.6">
<world name="default">
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
<scene>
<shadows>false</shadows>
</scene>
<gui fullscreen='0'>
<camera name='user_camera'>
<pose frame=''>0.319654 -0.235002 9.29441 0 1.5138 0.009599</pose>
<view_controller>orbit</view_controller>
<projection_type>perspective</projection_type>
</camera>
</gui>
<physics type="ode">
<real_time_update_rate>1000.0</real_time_update_rate>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<ode>
<solver>
<type>quick</type>
<iters>150</iters>
<precon_iters>0</precon_iters>
<sor>1.400000</sor>
<use_dynamic_moi_rescaling>1</use_dynamic_moi_rescaling>
</solver>
<constraints>
<cfm>0.00001</cfm>
<erp>0.2</erp>
<contact_max_correcting_vel>2000.000000</contact_max_correcting_vel>
<contact_surface_layer>0.01000</contact_surface_layer>
</constraints>
</ode>
</physics>
<!-- <model name="turtlebot3_world">
<static>1</static>
<include>
<uri>model://turtlebot3_world</uri>
</include>
</model> -->
<model name="racecar">
<pose>-2.0 -0.5 0.01 0.0 0.0 0.0</pose>
<!-- base footprint -->
<link name="base_footprint"/>
<!-- base_link -->
<link name="base_link">
<inertial>
<pose>0 0 0.04 0 0 0</pose>
<!-- <inertia>
<ixx>1.1</ixx>
<ixy>0.000</ixy>
<ixz>0.000</ixz>
<iyy>1.1</iyy>
<iyz>0.000</iyz>
<izz>1.1</izz>
</inertia> -->
<mass>100</mass>
</inertial>
<collision name="base_link_collision">
<pose>0 0 0.04 0 0 0</pose>
<geometry>
<box>
<size>0.1 0.1 0.02</size>
</box>
</geometry>
</collision>
<visual name="base_link_visual">
<pose>0 0 0.04 0 0 0</pose>
<geometry>
<box>
<size>0.26 0.16 0.02</size>
</box>
</geometry>
</visual>
</link>
<joint name="base_joint" type="fixed">
<parent>base_footprint</parent>
<child>base_link</child>
<pose>0 0 0.04 0 0 0</pose>
</joint>
<!-- left front wheel link -->
<link name="left_front_wheel">
<inertial>
<mass>1.0</mass>
</inertial>
<collision name="left_front_wheel_collision">
<pose>0.13 0.08 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
<surface>
<friction>
<ode>
<mu>1.1</mu>
<mu2>1.1</mu2>
<slip1>0.0</slip1>
<slip2>0.0</slip2>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
<visual name="left_front_wheel_visual">
<pose>0.13 0.08 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="left_front_wheel_joint" type="revolute">
<parent>left_front_axle</parent>
<child>left_front_wheel</child>
<pose>0.13 0.08 0.04 0 0 0</pose>
<axis>
<xyz>0 1 0</xyz>
</axis>
</joint>
<link name="left_front_axle">
<inertial>
<pose>0.13 0.08 0.04 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="left_steering_joint" type="revolute">
<parent>left_steering</parent>
<child>left_front_axle</child>
<pose>0.13 0.08 0.05 0 0 0</pose>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
<link name="left_steering">
<inertial>
<pose>0.13 0.08 0.05 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="left_joint" type="fixed">
<parent>base_link</parent>
<child>left_steering</child>
<pose>0.13 0.08 0.05 0 0 0</pose>
</joint>
<!-- right front wheel link -->
<link name="right_front_wheel">
<inertial>
<mass>1.0</mass>
</inertial>
<collision name="right_front_wheel_collision">
<pose>0.13 -0.08 0.04 1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
<surface>
<friction>
<ode>
<mu>1.1</mu>
<mu2>1.1</mu2>
<slip1>0.0</slip1>
<slip2>0.0</slip2>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
<visual name="right_front_wheel_visual">
<pose>0.13 -0.08 0.04 1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="right_front_wheel_joint" type="revolute">
<parent>right_front_axle</parent>
<child>right_front_wheel</child>
<pose>0.13 -0.08 0.04 0 0 0</pose>
<axis>
<xyz>0 1 0</xyz>
</axis>
</joint>
<link name="right_front_axle">
<inertial>
<pose>0.13 -0.08 0.04 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="right_steering_joint" type="revolute">
<parent>right_steering</parent>
<child>right_front_axle</child>
<pose>0.13 -0.08 0.05 0 0 0</pose>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
<link name="right_steering">
<inertial>
<pose>0.13 -0.08 0.05 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="right_joint" type="fixed">
<parent>base_link</parent>
<child>right_steering</child>
<pose>0.13 -0.08 0.05 0 0 0</pose>
</joint>
<!-- front wheel link -->
<!-- <link name="front_wheel">
<inertial>
<mass>1.0</mass>
</inertial>
<collision name="front_wheel_collision">
<pose>0.13 0.0 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
<surface>
<friction>
<ode>
<mu>1.1</mu>
<mu2>1.1</mu2>
<slip1>0.0</slip1>
<slip2>0.0</slip2>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
<visual name="front_wheel_visual">
<pose>0.13 0.0 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="front_wheel_joint" type="revolute">
<parent>front_axle</parent>
<child>front_wheel</child>
<pose>0.13 0.0 0.04 0 0 0</pose>
<axis>
<xyz>0 1 0</xyz>
</axis>
</joint>
<link name="front_axle">
<inertial>
<pose>0.13 0 0.04 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="steering_joint" type="revolute">
<parent>front_steering</parent>
<child>front_axle</child>
<pose>0.13 0.0 0.05 0 0 0</pose>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
<link name="front_steering">
<inertial>
<pose>0.13 0 0.05 0 0 0</pose>
<mass>0.1</mass>
</inertial>
</link>
<joint name="front_joint" type="fixed">
<parent>base_link</parent>
<child>front_steering</child>
<pose>0.13 0 0.05 0 0 0</pose>
</joint> -->
<!-- left rear wheel link -->
<link name="left_rear_wheel">
<inertial>
<mass>1.0</mass>
</inertial>
<collision name="left_rear_wheel_collision">
<pose>-0.13 0.08 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
<surface>
<friction>
<ode>
<mu>1.1</mu>
<mu2>1.1</mu2>
<slip1>0.0</slip1>
<slip2>0.0</slip2>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
<visual name="left_rear_wheel_visual">
<pose>-0.13 0.08 0.04 -1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="left_rear_wheel_joint" type="revolute">
<parent>base_link</parent>
<child>left_rear_wheel</child>
<pose>-0.13 0.08 0.04 0 0 0</pose>
<axis>
<xyz>0 1 0</xyz>
<dynamics>
<friction>18.0474092253</friction>
</dynamics>
</axis>
</joint>
<!-- right rear wheel link -->
<link name="right_rear_wheel">
<inertial>
<mass>1.0</mass>
</inertial>
<collision name="right_rear_wheel_collision">
<pose>-0.13 -0.08 0.04 1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
<surface>
<friction>
<ode>
<mu>1.1</mu>
<mu2>1.1</mu2>
<slip1>0.0</slip1>
<slip2>0.0</slip2>
</ode>
</friction>
<contact>
<ode>
<min_depth>0.001</min_depth>
<kp>1e9</kp>
</ode>
</contact>
</surface>
</collision>
<visual name="right_rear_wheel_visual">
<pose>-0.13 -0.08 0.04 1.57 0 0</pose>
<geometry>
<cylinder>
<length>0.04</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="right_rear_wheel_joint" type="revolute">
<parent>base_link</parent>
<child>right_rear_wheel</child>
<pose>-0.13 -0.08 0.04 0 0 0</pose>
<axis>
<xyz>0 1 0</xyz>
<dynamics>
<friction>18.0474092253</friction>
</dynamics>
</axis>
</joint>
<!-- left brush -->
<link name="left_brush">
<inertial>
<mass>1.0</mass>
</inertial>
<visual name="left_brush_visual">
<pose>0.16 0.1 0.02 0 0 0</pose>
<geometry>
<cylinder>
<length>0.02</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="left_brush_joint" type="fixed">
<parent>base_link</parent>
<child>left_brush</child>
<pose>0.16 0.1 0.01 0 0 0</pose>
</joint>
<!-- right brush -->
<link name="right_brush">
<inertial>
<mass>1.0</mass>
</inertial>
<visual name="right_brush_visual">
<pose>0.16 -0.1 0.02 0 0 0</pose>
<geometry>
<cylinder>
<length>0.02</length>
<radius>0.04</radius>
</cylinder>
</geometry>
</visual>
</link>
<joint name="right_brush_joint" type="fixed">
<parent>base_link</parent>
<child>right_brush</child>
<pose>0.16 -0.1 0.01 0 0 0</pose>
</joint>
<!-- ackermann drive -->
<plugin name="racecar_ackermann_drive" filename="libgazebo_ros_ackermann_drive.so">
<ros>
<!-- <namespace>/tb3</namespace> -->
</ros>
<update_rate>100</update_rate>
<!-- wheels -->
<front_left_joint>left_front_wheel_joint</front_left_joint>
<front_right_joint>right_front_wheel_joint</front_right_joint>
<rear_left_joint>left_rear_wheel_joint</rear_left_joint>
<rear_right_joint>right_rear_wheel_joint</rear_right_joint>
<left_steering_joint>left_steering_joint</left_steering_joint>
<right_steering_joint>right_steering_joint</right_steering_joint>
<!-- <steering_wheel_joint>steering_joint</steering_wheel_joint> -->
<!-- Max absolute steer angle for tyre in radians-->
<!-- Any cmd_vel angular z greater than this would be capped -->
<max_steer>0.6458</max_steer>
<!-- Max absolute steering angle of steering wheel -->
<max_steering_angle>7.85</max_steering_angle>
<!-- Max absolute linear speed in m/s -->
<max_speed>1.2</max_speed>
<!-- PID tuning -->
<left_steering_pid_gain>800 1 5</left_steering_pid_gain>
<left_steering_i_range>0 0</left_steering_i_range>
<right_steering_pid_gain>800 1 5</right_steering_pid_gain>
<right_steering_i_range>0 0</right_steering_i_range>
<linear_velocity_pid_gain>1000 0 3</linear_velocity_pid_gain>
<linear_velocity_i_range>0 0</linear_velocity_i_range>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<publish_distance>false</publish_distance>
<odometry_topic>odom</odometry_topic>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
<plugin name="racecar_joint_state" filename="libgazebo_ros_joint_state_publisher.so">
<ros>
<remapping>~/out:=joint_states</remapping>
</ros>
<update_rate>30</update_rate>
<joint_name>left_front_wheel_joint</joint_name>
<joint_name>right_front_wheel_joint</joint_name>
<joint_name>left_rear_wheel_joint</joint_name>
<joint_name>right_rear_wheel_joint</joint_name>
<joint_name>left_steering_joint</joint_name>
<joint_name>right_steering_joint</joint_name>
<!-- <joint_name>steering_joint</joint_name> -->
</plugin>
<link name="base_scan">
<inertial>
<pose>0 0 0.1 0 0 0</pose>
<mass>0.125</mass>
</inertial>
<visual name="lidar_sensor_visual">
<pose>0 0 0.1 0 0 0</pose>
<geometry>
<cylinder>
<length>0.002</length>
<radius>0.01</radius>
</cylinder>
</geometry>
</visual>
<sensor name="hls_lfcd_lds" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<pose>0 0 0.1 0 0 0</pose>
<update_rate>5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>3.5</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="racecar_laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<!-- <namespace>/tb3</namespace> -->
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>base_scan</frame_name>
</plugin>
</sensor>
</link>
<joint name="lidar_joint" type="fixed">
<parent>base_link</parent>
<child>base_scan</child>
<pose>0 0 0.1 0 0 0</pose>
</joint>
</model>
<model name='Wall'>
<pose>0 0 0 0 0 0</pose>
<link name='Wall_0'>
<collision name='Wall_0_Collision'>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_0_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>-0 -2.925 0 0 -0 0</pose>
</link>
<link name='Wall_11'>
<collision name='Wall_11_Collision'>
<geometry>
<box>
<size>2 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_11_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>2 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>1.9407 1.29165 0 0 -0 0</pose>
</link>
<link name='Wall_3'>
<collision name='Wall_3_Collision'>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_3_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>2.925 -0 0 0 -0 1.5708</pose>
</link>
<link name='Wall_4'>
<collision name='Wall_4_Collision'>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_4_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>-0 2.925 0 0 -0 3.14159</pose>
</link>
<link name='Wall_5'>
<collision name='Wall_5_Collision'>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_5_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>6 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>-2.925 -0 0 0 -0 -1.5708</pose>
</link>
<link name='Wall_7'>
<collision name='Wall_7_Collision'>
<geometry>
<box>
<size>4 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_7_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>4 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>-0.934225 -1.12853 0 0 -0 0</pose>
</link>
<link name='Wall_9'>
<collision name='Wall_9_Collision'>
<geometry>
<box>
<size>2.25 0.15 2.5</size>
</box>
</geometry>
<pose>0 0 1.25 0 -0 0</pose>
</collision>
<visual name='Wall_9_Visual'>
<pose>0 0 1.25 0 -0 0</pose>
<geometry>
<box>
<size>2.25 0.15 2.5</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
<ambient>1 1 1 1</ambient>
</material>
<meta>
<layer>0</layer>
</meta>
</visual>
<pose>-1.8489 1.25198 0 0 -0 0</pose>
</link>
<static>1</static>
</model>
</world>
</sdf>















 2120
2120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









