






基于mpc(最优控制)的车辆自适应巡航控制(acc),模型预测控制,通过carsim与matlab联防实现速度与间距控制。
最优控制(MPC):最优控制是一种优化方法,用于设计的控制策略,以使在给定约束条件下达到最优性能。
车辆自适应巡航控制(ACC):车辆自适应巡航控制是一种智能驾驶技术,通过使用传感器和控制算法,使车辆能够自动调整速度和与前车的间距,以保持安全距离并提供舒适的驾驶体验。
模型预测控制(MPC):模型预测控制是一种控制方法,它使用的数学模型来预测未来的行为,并根据这些预测进行控制决策,以实现所需的性能指标。
Carsim:Carsim是一种用于车辆动力学仿真的工具,它可以模拟车辆的运动行为和性能。
Matlab:Matlab是一种数值计算和科学仿真,它提供了丰富的工具和函数,用于进行数学建模、数据分析和控制设计。
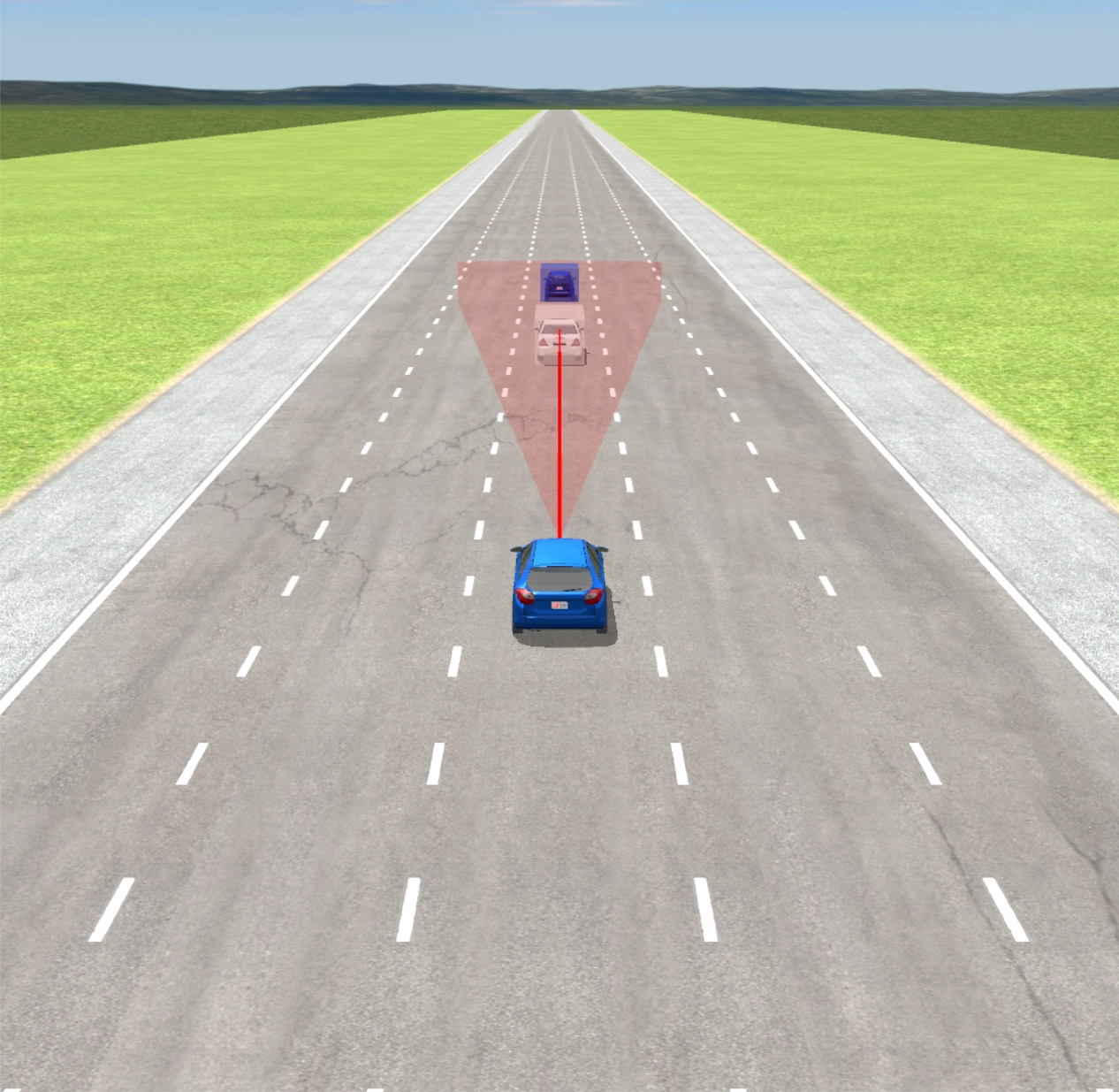
延申科普: 车辆自适应巡航控制(ACC)是智能驾驶技术中的一项重要应用。ACC通过使用雷达、激光等传感器来感知前方车辆的位置和速度,并使用最优控制和模型预测控制方法来计算出最佳的速度和间距控制策略。ACC可以在高速公路等道路上自动调整车辆的速度,以保持与前车的安全距离,并根据交通状况和驾驶者的偏好提供舒适的驾驶体验。
最优控制(MPC)是一种优化方法,它在控制设计中起着重要作用。MPC使用的数学模型来预测未来的行为,并根据这些预测进行控制决策,以实现所需的性能指标。MPC可以应用于各种领域,如工业过程控制、机器人控制和交通控制等。
Carsim是一种常用的车辆动力学仿真,它可以模拟车辆在不同路况下的运动行为和性能。通过在Carsim中建立车辆的数学模型,可以对车辆的加速、制动、转向等行为进行仿真和分析,以评估车辆的性能和设计控制策略。
Matlab是一种功能强大的数值计算和科学仿真,广泛应用于工程、科学和技术领域。Matlab提供了丰富的工具和函数,用于进行数学建模、数据分析和控制设计。在控制设计中,Matlab可以用于建立的数学模型、设计控制算法,并进行仿真和分析,以评估的性能和优化控制策略。
YID:4529677970280675
一無所有`


探索基于MPC的车辆自适应巡航控制:在Carsim与Matlab的联合仿真中实现速度与间距的精确控制
在数字世界的广阔天地里,我们探索着一种名为“最优控制”的奇妙艺术。今天,我们将以一个特定的角度——基于MPC(最优控制)的车辆自适应巡航控制(ACC)——来揭开这一技术的神秘面纱。让我们在Carsim与Matlab的联防中,探索如何实现速度与间距的精确控制。
一、初识MPC与车辆ACC
MPC,作为一种优化方法,它的魅力在于其能够在给定的约束条件下,为设计出最优的控制策略。而车辆自适应巡航控制,则是这一优化思想在汽车工程中的具体应用。它通过传感器和控制算法,使车辆能够自动调整速度和与前车的间距,从而保持安全距离并提供舒适的驾驶体验。
二、在Carsim与Matlab中实现MPC-ACC
在Carsim这一车辆动力学仿真中,我们可以模拟出车辆的运动行为和性能。与此同时,Matlab则提供了强大的算法设计和分析工具。这两者的联合仿真,为我们的MPC-ACC的实现提供了可能。
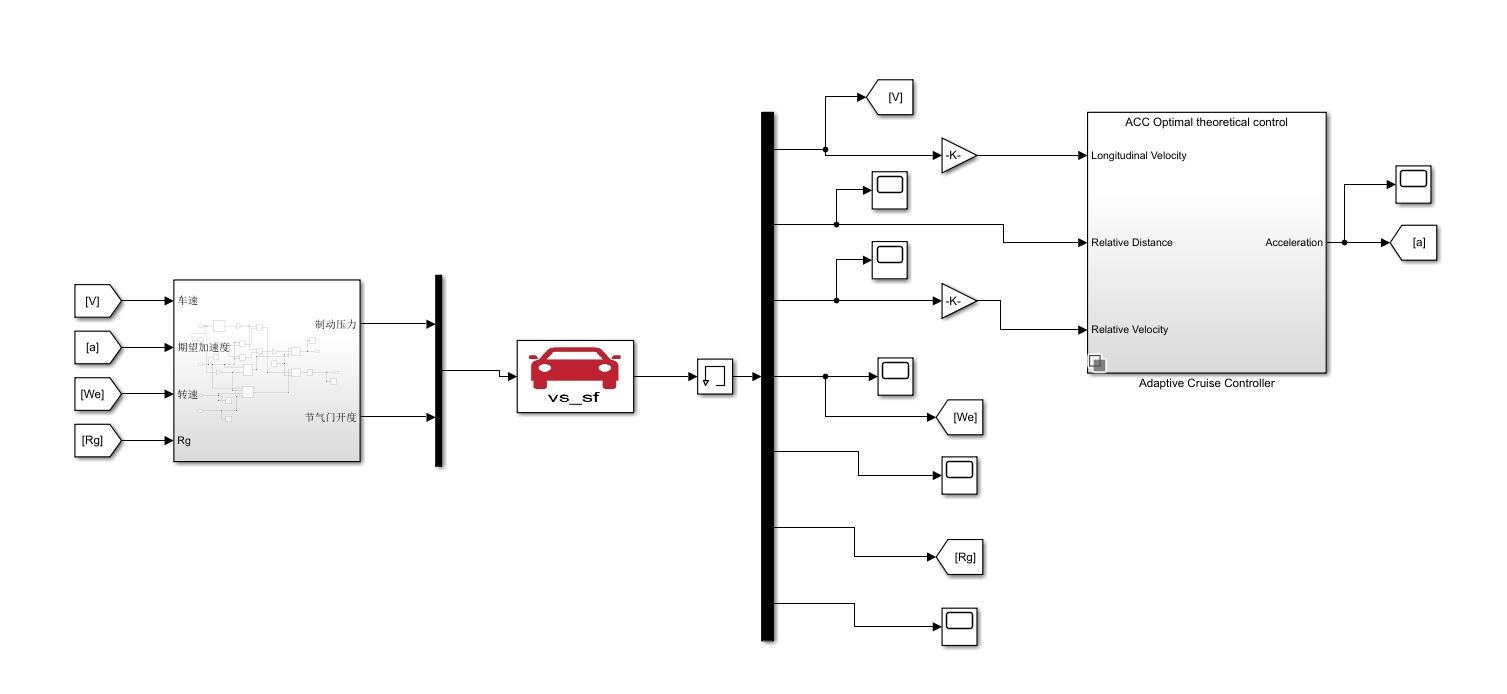
我们首先在Matlab中建立起MPC的模型。在这个模型中,我们将车辆的动力学模型作为MPC的基础,通过预测未来行为,进行控制决策。然后,我们将这个MPC模型与Carsim进行联接,让两者能够进行数据交互。
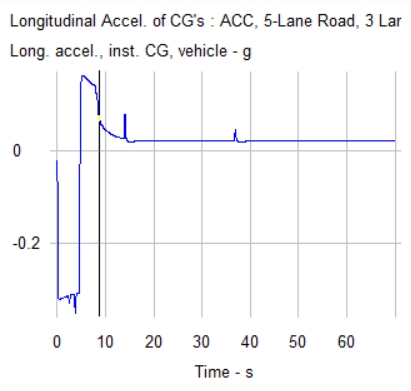
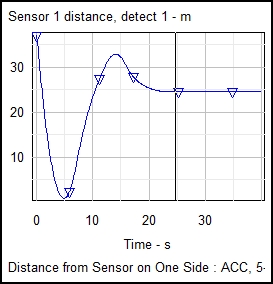
在仿真过程中,Carsim会模拟出车辆的实际运动状态,包括速度、加速度、与前车的间距等。这些数据会被传送到Matlab中的MPC模型。MPC模型根据这些数据,以及预设的控制策略,计算出下一步的控制指令。然后这些指令再被传回Carsim,驱动车辆的运动。
三、实现速度与间距的精确控制
通过这样的联防仿真,我们可以实现速度与间距的精确控制。MPC模型会根据车辆的当前状态,以及与前车的相对位置和速度,计算出最佳的控制策略。这个策略会使得车辆既能保持安全距离,又能实现舒适的驾驶体验。
四、示例代码片段
以下是一个简单的Matlab代码片段,用于演示如何实现MPC-ACC的基本控制逻辑:
% 初始化车辆和MPC模型
vehicle = init_vehicle_model(); % 在Carsim中初始化车辆模型
mpc_model = init_mpc_model(); % 在Matlab中初始化MPC模型
% 开始仿真循环
while simulation_running % 仿真循环条件,这里省略了具体实现细节
% 从Carsim获取车辆当前状态和前车信息
current_state = get_vehicle_state(vehicle);
leading_vehicle_info = get_leading_vehicle_info();
% 计算MPC控制指令
control_command = mpc_model.compute_control_command(current_state, leading_vehicle_info);
% 将控制指令发送到Carsim,驱动车辆运动
set_vehicle_control_command(vehicle, control_command);
% 更新仿真状态,准备下一次循环
update_simulation_state();
end
以上代码只是一个大致的框架,具体的实现细节需要根据具体的和需求来设计。但无论怎样设计,MPC-ACC的核心思想都是通过优化控制策略,实现速度与间距的精确控制。
五、结语
在数字世界中,我们通过最优控制的思想,实现了车辆自适应巡航控制的精确控制。通过Carsim与Matlab的联防仿真,我们验证了这一思想的可行性。这不仅为自动驾驶技术的发展提供了新的思路,也为我们带来了更安全、更舒适的驾驶体验。
后有独家资源: http://lanzous.cn/677970280675.html
















 1798
1798

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









