






自动驾驶融合定位:凸优化基础
一、概述
在目前主流的融合框架里,基本就分为优化和滤波两大类,滤波我们在前面通过大量的篇幅已经介绍过了,这里就介绍基于优化的方法。
优化的方法仍然是一个包含复杂内容的东西,一篇文章肯定也介绍不完,所以我们在本篇文章里,同样只介绍基础知识部分,基于优化的融合放在下一篇文章介绍。

附赠自动驾驶学习资料和量产经验:链接
二、优化问题定义
为了避免后续内容陷入繁杂的公式推导中摸不着方向,所以我们得先搞清楚优化是在做什么,也就是先定义什么是优化问题。
我们之前多次提过,融合就是使用多种传感器得到一个最优的位姿结果,这里面其实分三步,第一步是把传感器的模型建立出来,第二部是综合多种传感器建立一个总的目标(残差),第三步是以目标为导向(让残差降到最小),寻找对应的最好位姿。实际上,这里的优化问题,其实做的就是第三步。
把上面定义的问题,用数学语言重新描述一下,就是

方程中, 𝑓(𝑥) 是残差函数,在实际使用中,它可以代表任何方式得到的残差,比如 ICP 中点到点之间的距离、融合中预测与观测之间的误差等等。这代表着,我们已经可以脱离具体的模型来讨论这个问题,也就是说,无论用的什么样的传感器,传感器的模型具体是什么样,都可以用这样的通用模型来表示它的优化问题,后面的讨论同样满足这个条件。
三、优化方法思路
所有的优化方法,其实都可以解释为“反复迭代去逼近最优值”,后面会介绍多种优化方法,但他们都不会脱离这样的迭代套路:
四、优化方法介绍
常见的优化方法有下面这样几种
1.最速下降法
损失函数可以泰勒展开如下

其中 𝐽 和 𝐻 分别为损失函数 𝐹 对变量 𝑋 的一阶导(也叫梯度或Jacobian矩阵)和二阶导(也叫Hessian矩阵) 。
最速下降法只保留一阶泰勒展开结果,取增量为
即沿梯度的反方向取增量,则可以保证使损失函数减小。
剩下的就按照迭代方法的那4步固定套路去走就可以了。
从上面的推导我们可以看出,最速下降法具有迭代方便、计算简单等优点,但是,一阶近似毕竟精度有限,所以在迭代时容易走出锯齿形状(如下图),而且越接近目标值,步长越小,前进越慢。

2.牛顿法
牛顿法保留二阶泰勒展开结果,此时的增量方程为

求解该方程,即可得到所需的增量。剩下的同样按4步套路走。
从原理上可以看出,对原函数的近似更精确,每一步的收敛更加准确,且收敛速度快,但它有一个明显的缺点,即需要计算 𝐻 矩阵,在优化规模较大时,不容易做到。
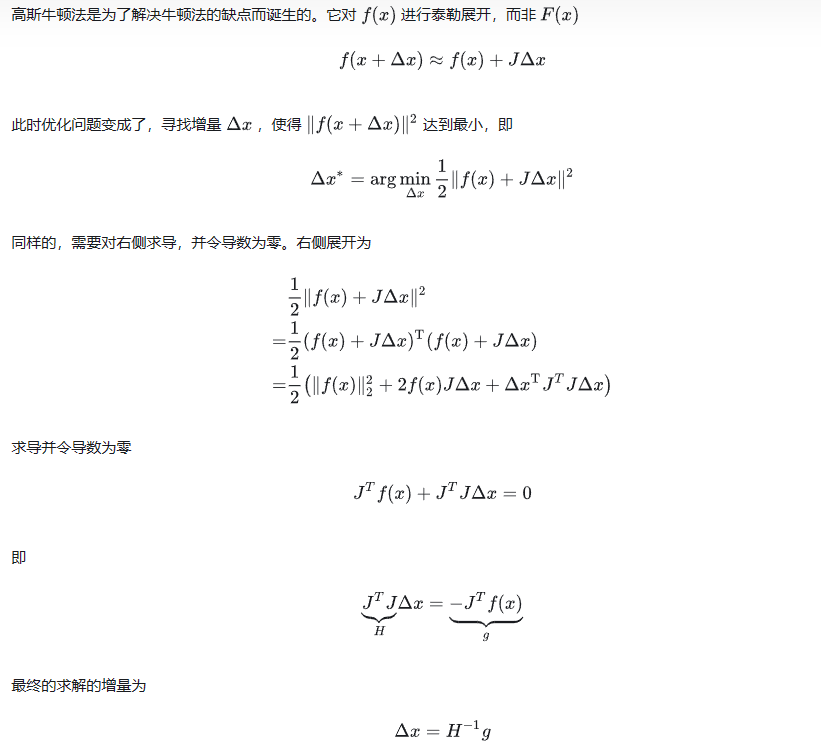
3.高斯牛顿法

4.LM方法
LM方法推导起来略显复杂,这里就直接给出增量方程的结论啦(如下),详细的细节可以参考《视觉slam十四讲》第6.2节。
(𝐻+𝜆𝐼)Δ𝑥=𝑔
该方法好处是可一定程度避免 𝐻 不正定带来的病态问题。实际使用中,当问题性质较好时,用高斯牛顿法;问题接近病态时,用LM方法。















 1523
1523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









