






网上直接在Gazebo中创建自定义环境的教程很多,可以用Gazebo自带模型,也可以用官方模型库,在此不赘述。
笔者是ROS初学者,在此记录一下自己的学习进程,过程中会存在很多问题,希望大佬们不吝赐教。
我用的是blender建模软件创建了自己的仿真环境,之后导入到Gazebo中。
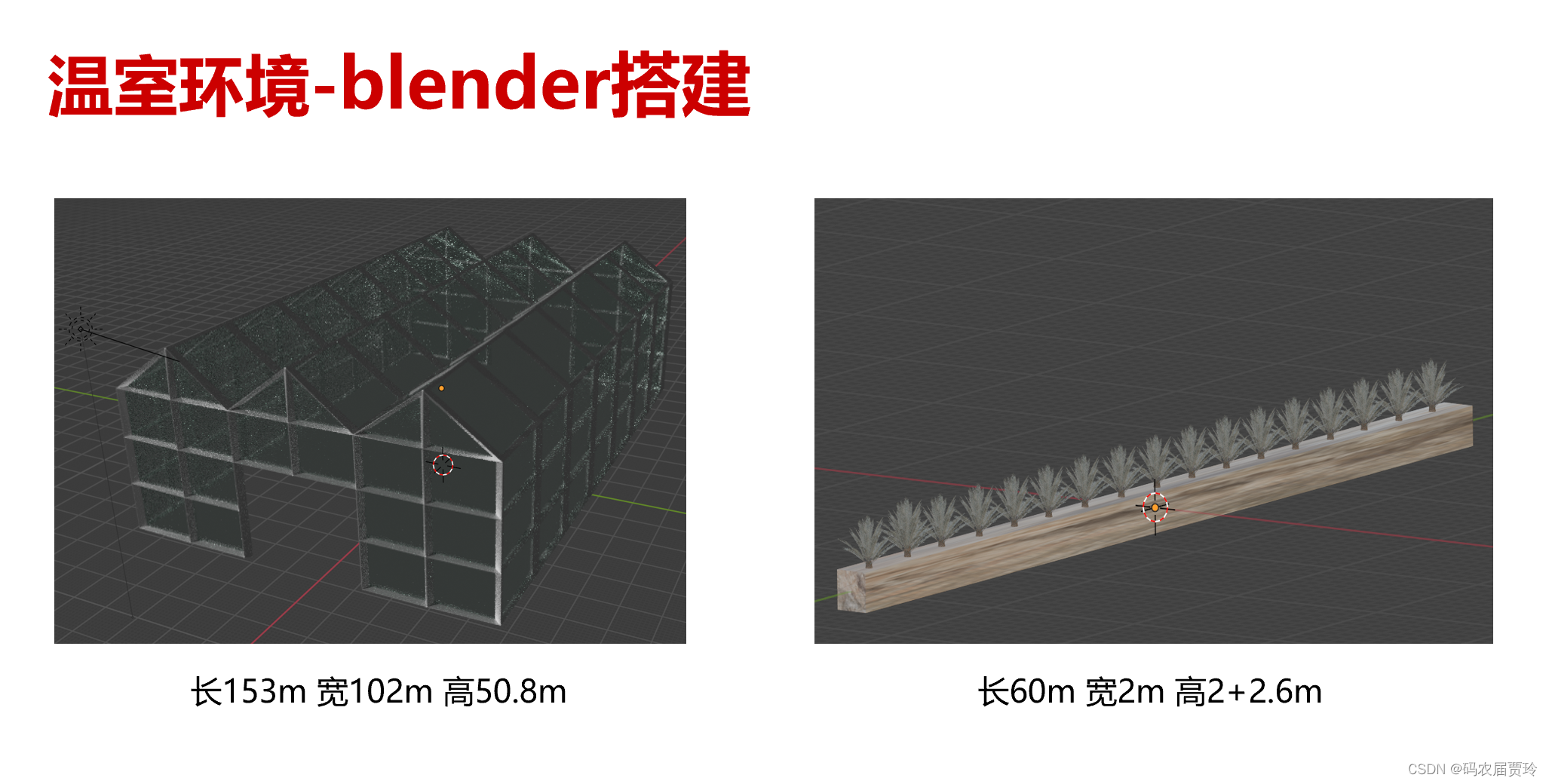
blender搭建好自己的环境后,导出为dae文件
导入到Gazebo的过程
菜单栏Edit >>>> Model Editer
Add Path 找到自定义环境的dae文件 直接添加保存即可
文件路径会自动加载到模型路径中,之后直接拖动使用。















 3159
3159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









