







 本文深入探讨机器人运动学中速度变量的转换关系,包括刚体的线速度、角速度以及雅可比矩阵的概念。通过介绍线速度矢量、角速度矢量的计算方法,阐述了刚体在关节与操作端之间速度的传递。同时,详细讲解了雅可比矩阵的求解及其在机器人连杆速度迭代计算中的应用,以及奇异性的讨论。
本文深入探讨机器人运动学中速度变量的转换关系,包括刚体的线速度、角速度以及雅可比矩阵的概念。通过介绍线速度矢量、角速度矢量的计算方法,阐述了刚体在关节与操作端之间速度的传递。同时,详细讲解了雅可比矩阵的求解及其在机器人连杆速度迭代计算中的应用,以及奇异性的讨论。
之前讲的都是有关于运动学的相关知识,运动学主要是关节与操作端之间,位置变量的转换关系。本章主要讨论关节与操作端之间,速度变量的转换关系。
1.概述
移动关节会导致操作端的平动,转动关节导致操作端转动+平动,即位置变量:
速度变量:,在这里将操作端角速度矢量记作
,那么速度变量的转换关系可以看成是:

1.1 时变位姿的描述
以表示位置矢量,其微分为:
的速度矢量
是{B}中的矢量,意义为
相对于{B}的移动速率。
同样可以转换为其他坐标系下的表示:
上式表示在{A}的表示。
如位置矢量是世界参考坐标系{U}中一个坐标系{C}的原点,对其速度矢量定义一个缩写符号:
在{A}中的表示写为
,而当参考系是{U}时,左上角省略符号U。
1.2角速度矢量
线速度矢量描述点的平动属性,角速度矢量描述刚体的旋转属性。由于坐标系总是固连在刚体上描述其位姿,所以角速度矢量描述坐标系的旋转运动。

上图中,描述了坐标系{B}相对于{A}的旋转,
的方向是{B}相对{A}旋转的瞬时旋转轴,
的大小表示旋转速度。
表示{B}绕{A}旋转的角速度矢量在{C}中的表示。
1.3角速度矢量的简化符号
如角速度矢量描述了坐标系{C}相对于世界参考坐标系{U}的旋转,则左上角的参考系符号可以省略,写成如下的简单形式:
是{C}相对于世界参考坐标系{U}的旋转矢量
在{A}中的描述,即
,而
是{C}相对于坐标系{A}的旋转矢量。
2.刚体的线速度和角速度
本节要讨论刚体的运动速度描述,把坐标系固连在所要描述的刚体上,刚体运动等同于该坐标系相对于另一个参照坐标系的运动。
2.1 线速度与角速度

线速度:
把坐标系{B}固连在刚体上,要求描述刚体上一点Q相对于固定坐标系{A}的平移运动,坐标系{B}相对于{A}的位姿用位置矢量
和旋转矩阵
描述,先假设方位
不随时间变化,则Q点相对于{A}的运动是由于
或
随时间变化引起的。
坐标系{A}中Q点的线速度:,上式是两个线速度的合成:{B}系移动线速度
+Q点相对于{B}系的平动折到{A}系的线速度
。
角速度:

设坐标系{B}和{A}的原点重合,相对于线速度为零的情况。{B}与刚体固连,{A}固定。B}相对于{A}的旋转速度用矢量表示.
已知矢量确定了{B}中一个固定点Q的位置。所以现在的问题是从{A}看,{B}相对{A}的旋转矢量
使
如何随时间变化。
先假设从{B}看矢量Q是不变的,即
既然Q相对{B}静止,显然从{A}看点Q的速度为旋转角速度,如图为用两个瞬时量表示矢量Q绕
的旋转,这是在{A}中观察的。
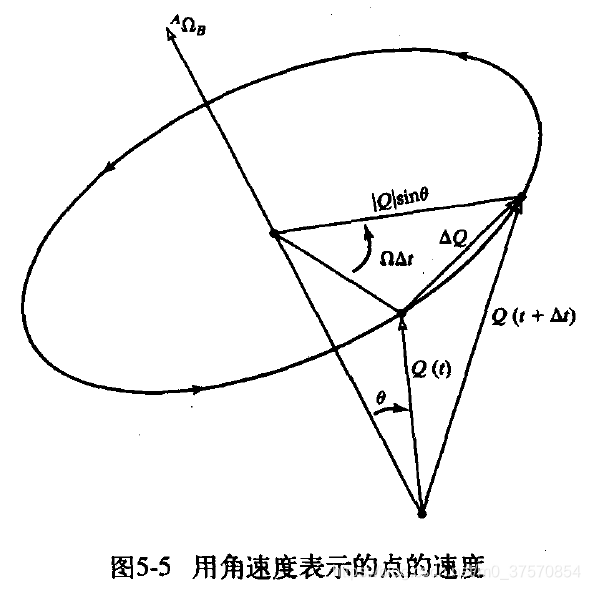
的微分增量一定垂直于
和
,增量大小为:
可以写成矢量积形式:
取极限后得到:因{B}相对{A}旋转而产生矢量Q的线速度:
再考虑:因{B}相对{A}平动和矢量Q相对{B}平动而产生的矢量Q的线速度:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









