







一、原理介绍
基于SMO观测得到的估计反电动势值中会含有一定的高频分量,故常通过对LPF设置合适的截止频率来进行滤波,但是精确的截止频率选取较难实现,因此会导致反电动势波形中不平滑,进而导致反电动势估计值的精确度。
为实现截止频率的自适应调节,将电机转速信息引入到LPF的截止频率中,构成可变截止频率LPF,依据转速变化实现截止频率的动态调整,抑制恒定截止频率导致的滤波效果不佳。
设置自适应LPF截止频率。
故该自适应LPF传递函数为

经该LPF滤波后的反电动势估计值为:

二、仿真验证
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
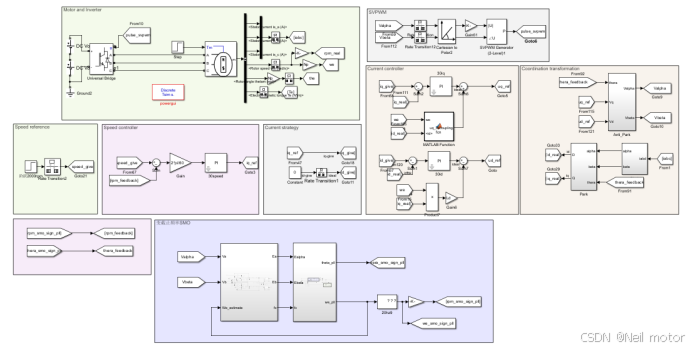
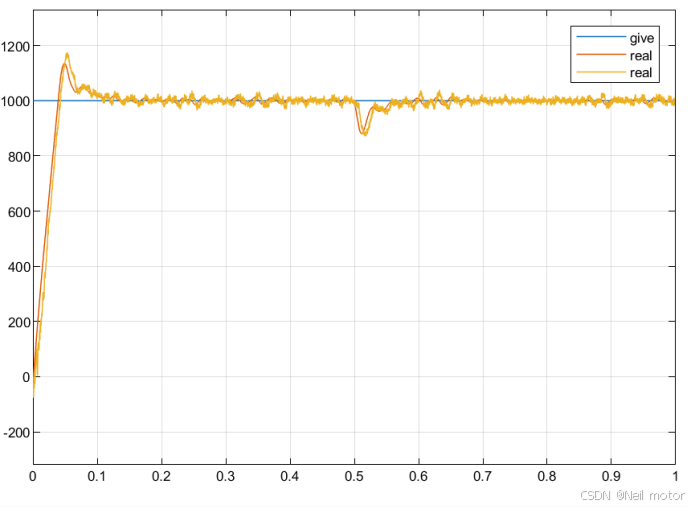
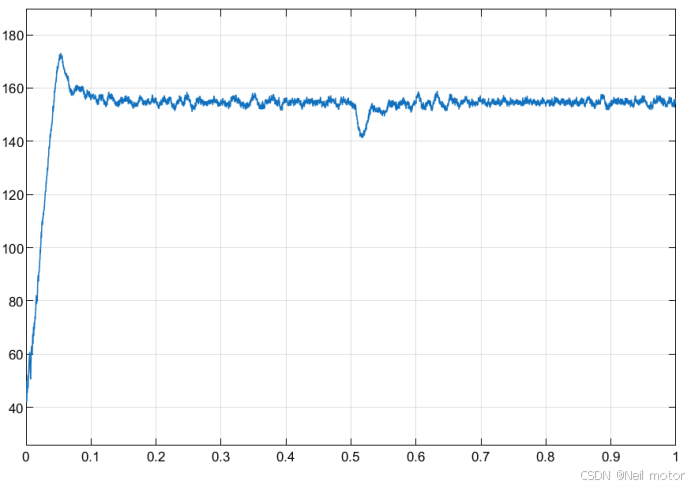
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
2.1给定转速、实际转速和估计转速
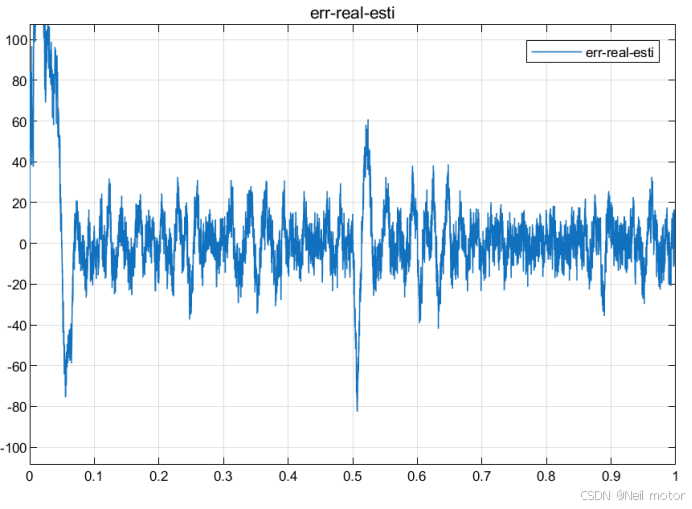
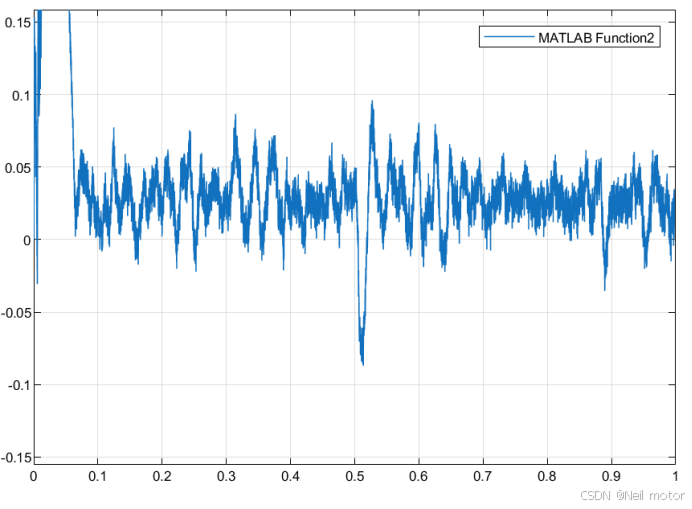
2.2估计转速与实际转速误差
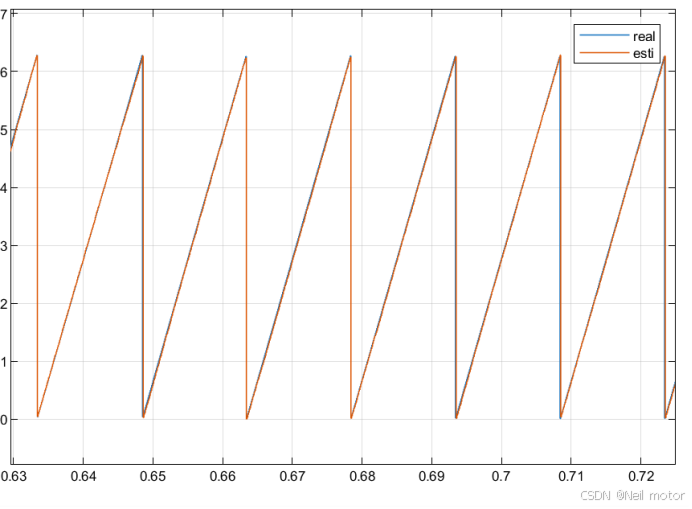
2.3估计转角与实际转角
2.4估计转角与实际转角误差
2.5 低通滤波截止频率
可以看出随着转速升高,低通滤波器截止频率随之变化,从而保持系统较好的动态性能
还有一种变截止频率的SMO,将截止频率设置不带初始值,但这样会造成SMO无法启动,因为零速时截止频率也为0 ,会造成SMO无法获得有效信息进而估计反电动势(在低通环节全部滤掉了)。这种方法需要在启动时用有速度启动或IF拉起来或结合零低速无速度传感器算法。好处就是估计转角的补偿角是一个定值。

















 1311
1311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









