







本文是quaternion kinematics for Error state kalman filter中关于eskf部分的学习笔记
Error-state Kinematics
在ESKF中,我们通常会提到 true,nominal 和error-state。其中,true-state可以被视为nominal state和error state的组合。其中,nominal state可以被视为一个大信号,而误差状态可以被视为一个小状态。
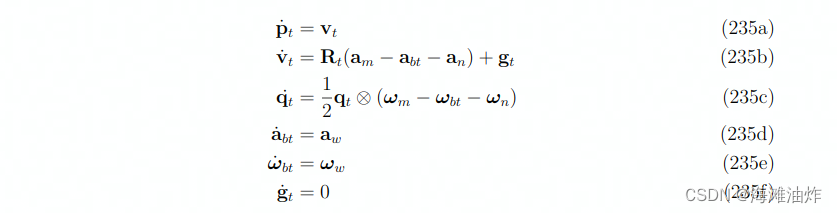
The true-state kinematics
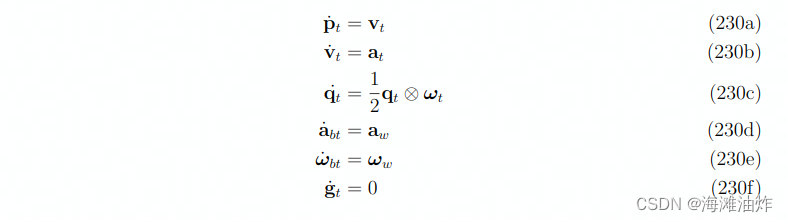
经过替换,可以得到
The nominal-state kinematics
名义状态对应的是不考虑噪声以及扰动的系统。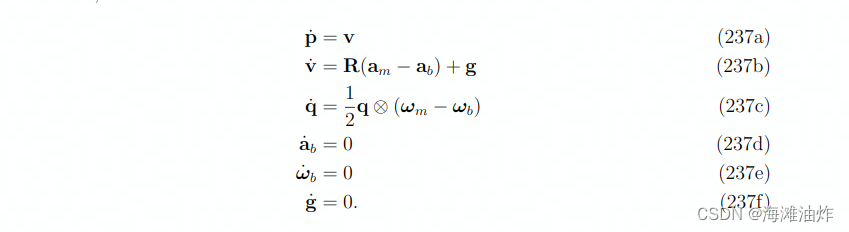
The error-state
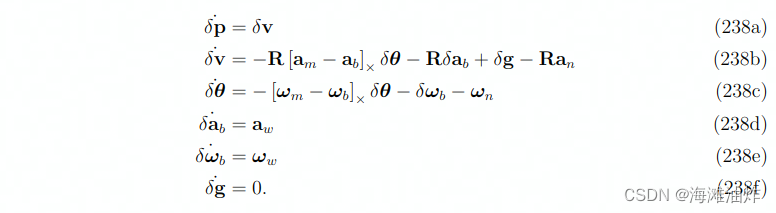
在上式中,a d e f 的处理可以视为非常简单。
而b和c的处理则需要一些技巧。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4301
4301











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









