





1、查看 rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree2、查看ros node 关系
rqt_graph3、列出所有话题
rostopic list4、查看某一话题的类型
以 /scan 为例
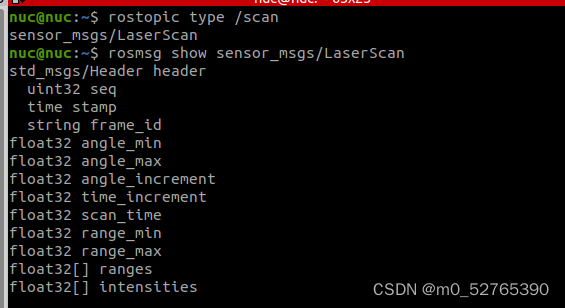
rostopic type /scan![]()
5、查看某个数据类型包含哪些数据
rosmsg show sensor_msgs/LaserScansensor_msgs/LaserScan 是 /scan 话题的类型。

1、查看 rqt_tf_tree
rosrun rqt_tf_tree rqt_tf_tree2、查看ros node 关系
rqt_graph3、列出所有话题
rostopic list4、查看某一话题的类型
以 /scan 为例
rostopic type /scan![]()
5、查看某个数据类型包含哪些数据
rosmsg show sensor_msgs/LaserScansensor_msgs/LaserScan 是 /scan 话题的类型。
 6410
3532
1139
1724
6410
3532
1139
1724











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























