







1.ros版本选择

2.安装
(1)配置软件库
流程:点击软件中心——>左上角 软件和更新
图上所示四个区域需要打钩

(2)ros安装步骤
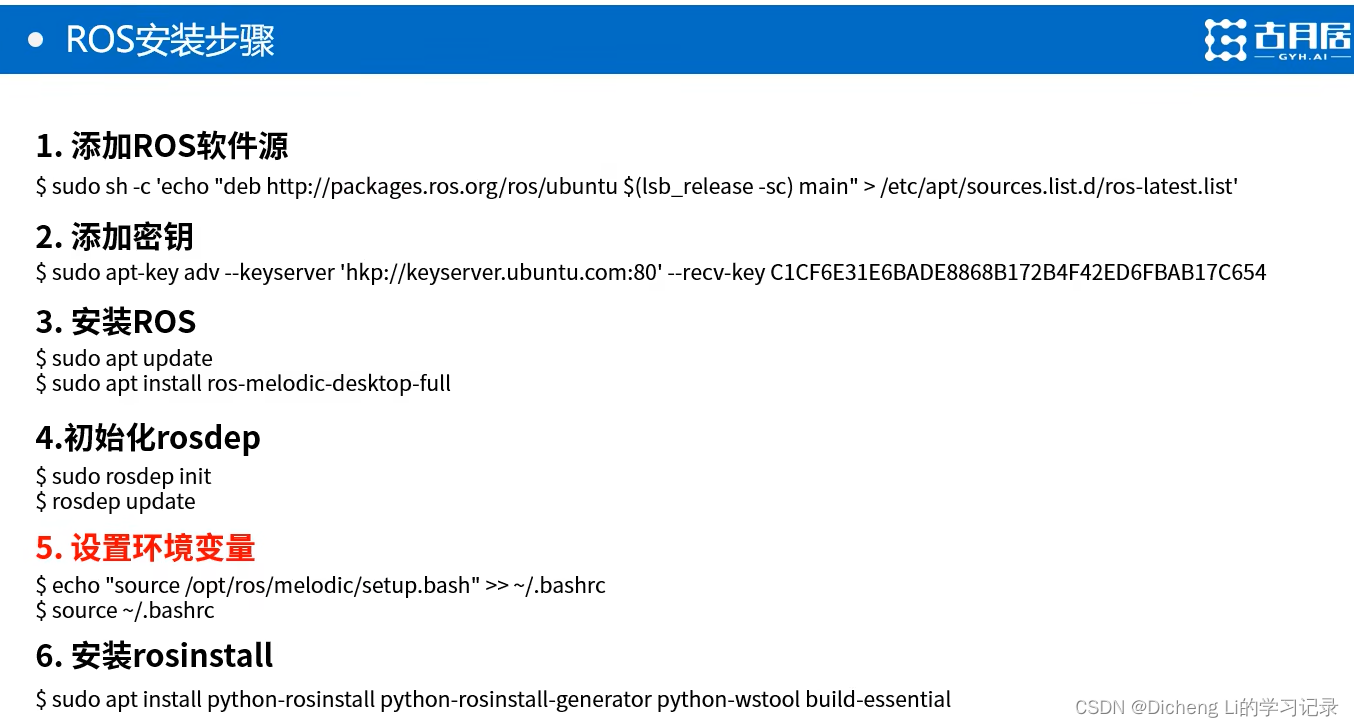
每个步骤的代码如下
1.添加ros软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.安装ros
sudo apt update
sudo apt install ros-melodic-desktop-full
4.初始化rosdep
sudo rosdep init
rosdep update
5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential3.安装完成
安装目录,默认在/opt/ros路径下
4.运行海龟小程序

输入roscore,如果出现图中框起来的ros版本与版本号,则代表运行正确

再打开一个终端(roscore的终端不要关闭),输入 rosrun turtlesim turtlesim_node 启动小海龟,如下图所示
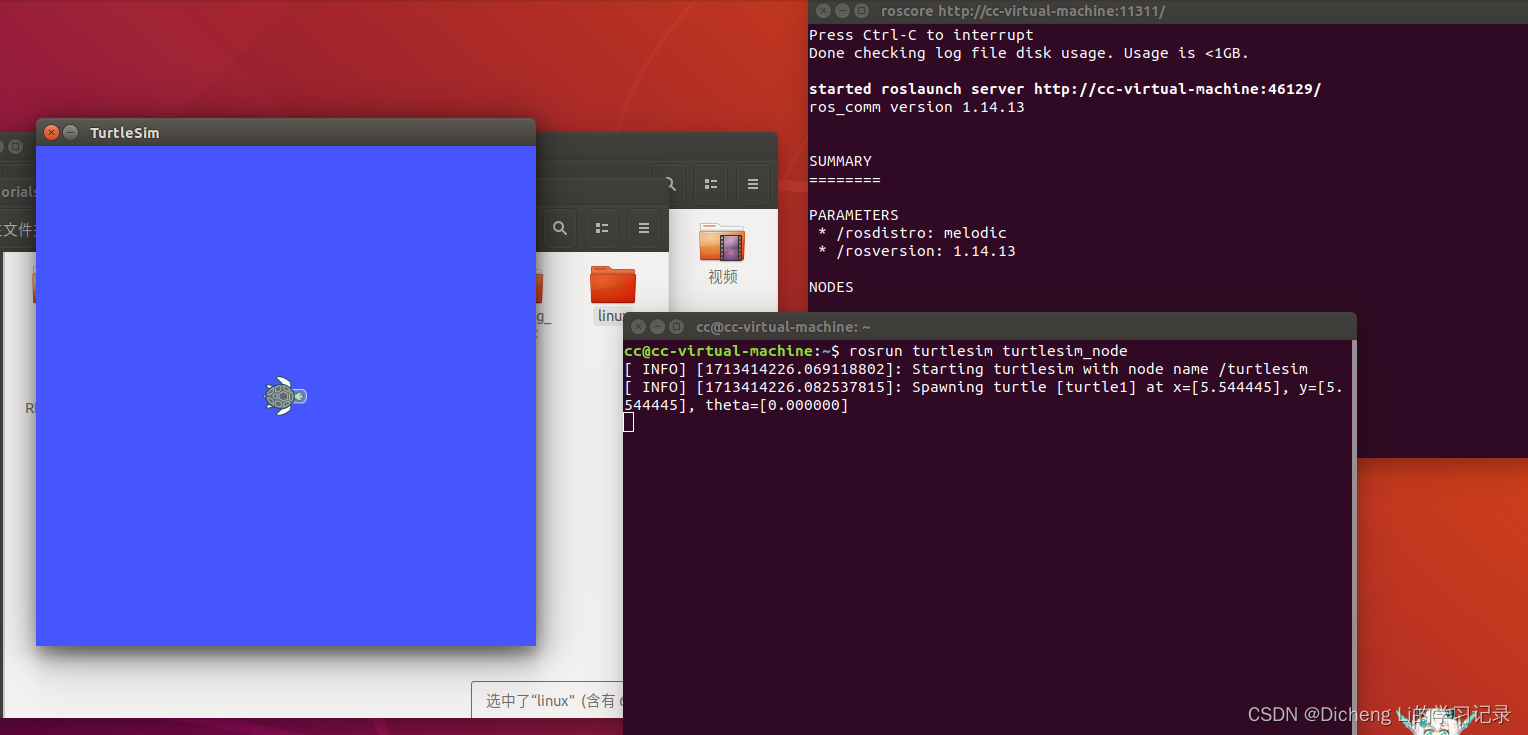
再打开一个终端,输入 rosrun turtlesim turtle_teleop_key,用鼠标控制小海龟移动

成功!














 441
441











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









