







1.ROS发展史

2.ros应用现状

3.ros是什么
ros = 通信机制+开发工具+应用功能+生态系统
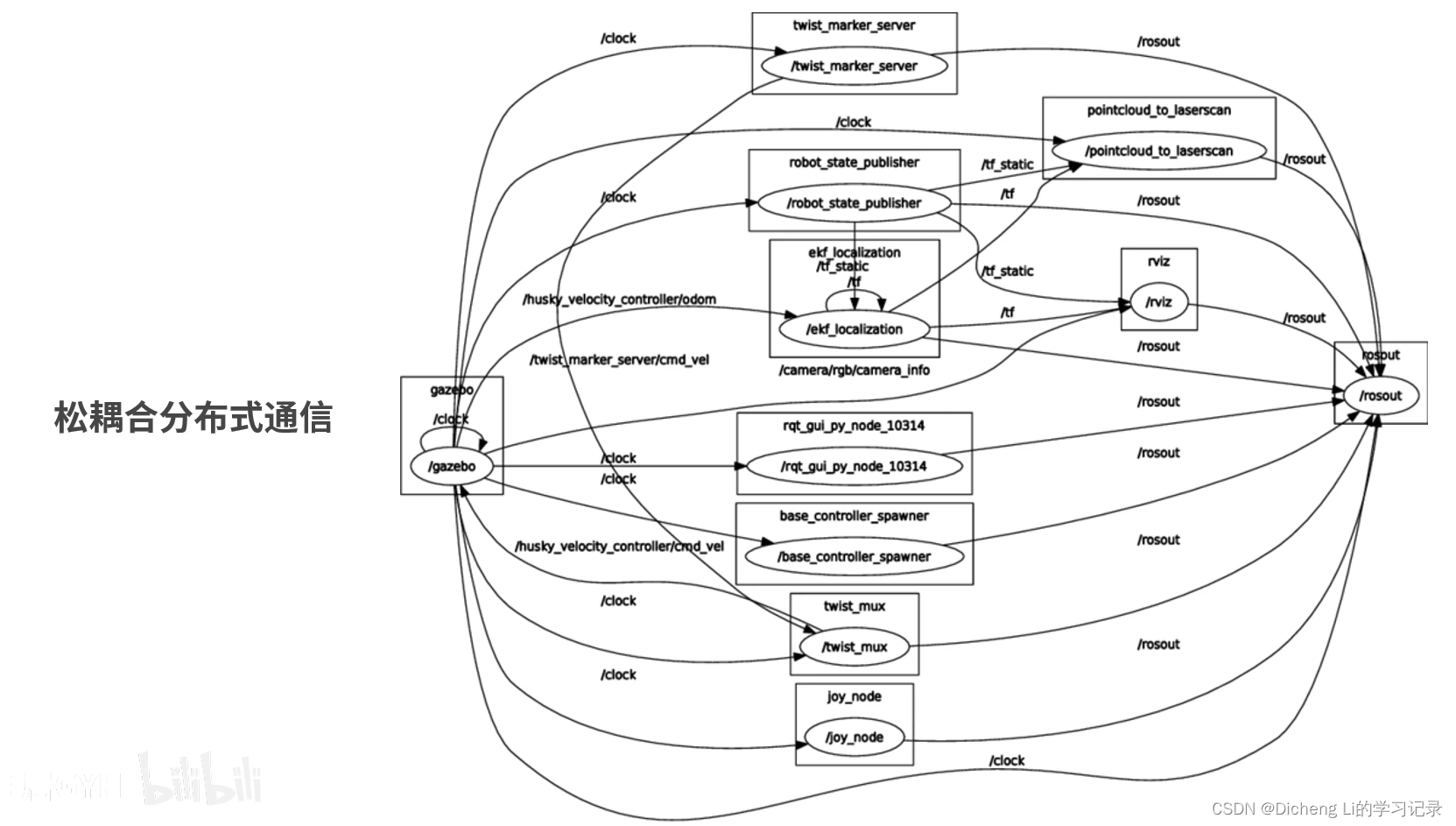
(1)通信机制
每一个具体功能都是一个椭圆节点,节点之间通过箭头做连接,箭头之间就代表节点之间通讯的数据流向。
(2)ROS中的开发工具
TF坐标变换
-
功能:TF是ROS中用于跟踪多个坐标帧之间的关系的库。机器人系统常常需要处理来自不同来源的空间信息,TF提供了一种维护和查询这些信息在不同时间点上的变换关系的方式。TF可以处理动态变换,并能确保数据在时间上的一致性。
-
用途:用于处理机器人部件之间的空间关系,例如,一个机器人的手臂相对于其基座的位置,或者摄像头视角相对于机器人的头部的方位等。
QT工具箱
- 功能:QT工具箱通常指的是QT Creator这一集成开发环境(IDE)的使用,它为ROS提供了开发界面。QT是一个跨平台的应用程序和用户界面框架,用C++开发,广泛用于开发图形用户界面应用程序及其他技术交互系统。
- 用途:在ROS中,QT可以用来创建复杂的用户界面,用于机器人控制面板或数据可视化。它使得开发者能够构建直观的操作界面,从而更有效地控制和监测机器人系统。
Rviz(ROS Visualization)
- 功能:Rviz是一个3D可视化工具,用于ROS环境中。它可以实时显示传感器数据和状态信息,帮助开发者理解机器人在物理或模拟环境中的行为。
- 用途:Rviz广泛用于调试机器人应用,包括但不限于显示机器人的模型、路径规划、感知数据(如激光雷达和摄像头数据)、以及执行动态复杂的环境交互。通过这种可视化,开发者可以直观地监控机器人的性能和行为。
Gazebo
- 功能:Gazebo是一个高度灵活的机器人仿真工具,可以精确并且高效地模拟机器人在复杂环境中的物理互动。它提供了高级的物理引擎、图形渲染以及其他传感器仿真技术。
- 用途:Gazebo用于在开发阶段测试机器人设计,无需实际制造出机器人即可测试其代码和硬件方案。这样可以大幅度降低开发成本并避免初期设计错误。

(3)ROS中的应用功能

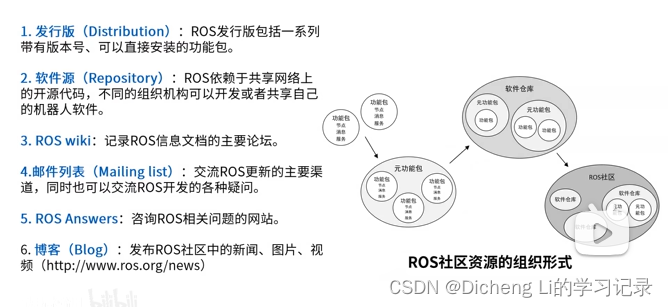
(4)生态系统















 1631
1631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









