







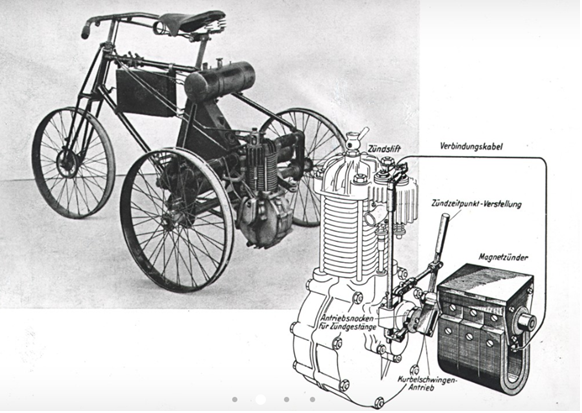
德国人卡尔·本茨(1844-1929年)于1885年10月成功研制世界上第一辆汽车,采用一台两冲程单缸0.9马力的汽油机。此车具备了现代汽车的一些特点,如火花点火、水冷循环、钢管车架钢板弹簧悬架、后轮驱动、前轮转向和制动把等机械部件。在后续的很长时期内,汽车的发展和革新主要集中在发动机、底盘车身等机械和电气领域。

从博世发展看汽车架构变化起源
汽车的起源来自于机械工业的发展,早期的车型是一个纯机械产物。汽车脱胎于马车,真正开始大规模的普及起源于1908年福特采用流水线生产T型车,将汽车从作坊产品带代入流水线工业化时代。
欢迎关注我的微信公众号:阿宝1990,每天给你汽车干货,我们始于车,但不止于车。

20世纪初的整车,电器部件主要是电磁点火系统。当时的整车按照部件可以分成四个部分:1、引擎+启动部分;2、传动系统;3、悬挂系统与车轮;4、车身。整车里面最主要的电气元件是电磁点火系统,采用干电池系统点火,火花由通过一个安装在引擎前方凸轮轴端部的低电压“计时器”分配到火星塞产生,这种“计时器”就是现代的电器化的前身。
国际Tier1 博世的起步就是伴随整车最原始电气化产品的普及。博世成立于1890年,成立之初做的是精密机械器件和电气工程工作,如安装电话系统和电铃。1897年根据客户要求,生产出了汽车磁力发电机点火装置,并成为唯一的点火设备供应商,以此为起点,正式切入汽车领域。
随着对于汽车功能要求的提升,机械部件逐步被功能更为完善的电气部件取代。在这个过程中,由于电气化是渐进式替代原有机械部件,因此引入的电气化产品都相互独立。随着汽车开始普及,出于高速安全角度,汽车上原本使用的乙炔灯逐步开始被电子照明系统所取代。

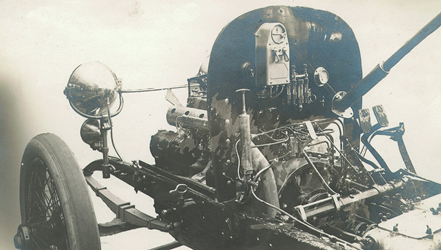
1954年,斯图加特车队中博世研究用车搭载不同的大灯和喇叭
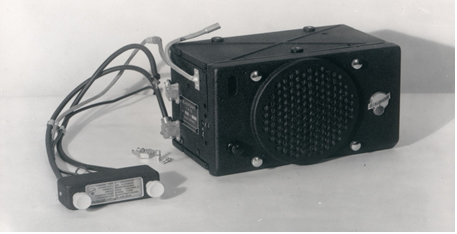
博世于1914 年左右推出了电子照明系统,由车头灯、发电机、电压调整器和电池组成的电子照明系统,这也是整车开始开始步入电气化时代最为明显的特征。随后在1915-1940年期间,博世陆续推出了启动电机、车载喇叭、柴油喷射系统、车载收音机等量产产品,持续完善车载电器功能。
1913年,梅赛德斯10/25HP 搭载的博世照明系统,配备发电机、大灯和电压调整器

1927年,博世研发柴油喷射系统
1932年博世首款量产车载收音机
自1960年代中期开始,博世开始专注于开发汽车电子产品,并在内部称为“电子零件时代的来临”。在1970年,电子产品正式成为博世关键产品,从最初的未知领域,摇身一变缔造整个公司延续至今的成功。最经典的例子就是1978 年推出的ABS 防锁死刹车系统,凭借在数个电子元件领域的专业知识,让该系统成为汽车技术工程领域的标准化技术。
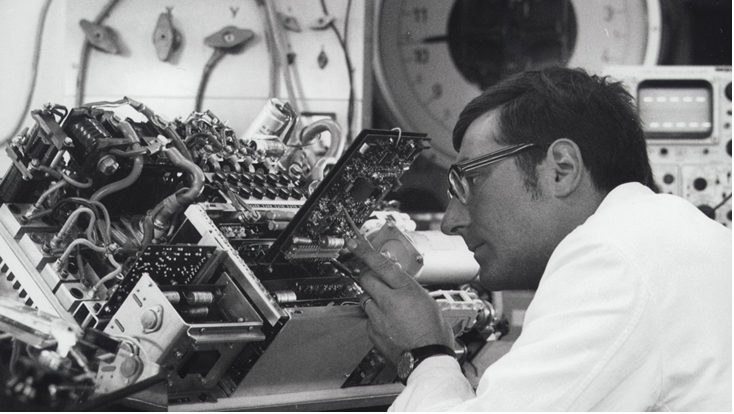
1967年,博世在测试电动车动力电子元件。
从二十世纪90年代开始,博世进一步推动整车架构中电子产品的比例,并开始推出辅助驾驶产品。1990年,博世开发了加速度等矢量传感器,1995年,推出了ESP,奠定了博世在底盘控制领域的地位,2000年推出了ACC、夜视系统等辅助驾驶功能。
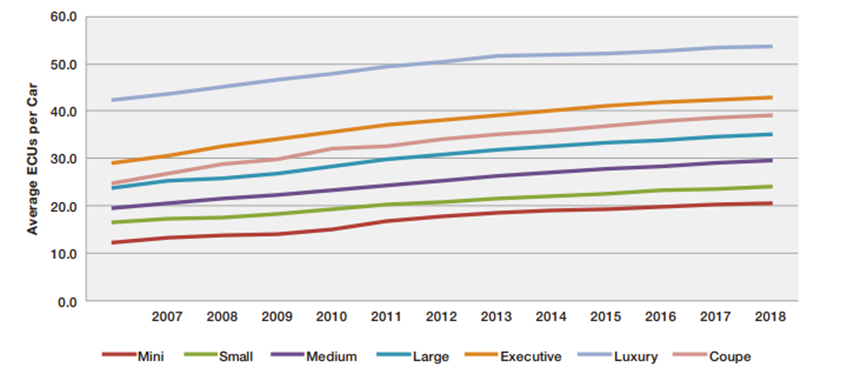
从博世的发展历程可以看到,过去的汽车电子占比提升很大程度由Tier 1来主导,并且是对机械件的替代补充。过去十年,单车的ECU数量接近翻倍增长,高端车型ECU数量由40个增长到55个左右,低端车型中ECU数量由12个增长到21个左右,高端车型超100个。

博世提出新的E/E架构
CAN通讯是一个伟大创新
现在大家一提到CAN通讯,都摇头,谁还学这个,随口就是车载以太网,传输速度快,双向通讯,感觉CAN就是上世纪通讯的老古董,就是落后的代名词,如果说汽车的十大伟大发明排序的话,除了发动机,CAN应该能排第二,如果没有CAN通讯,现在的汽车的排放量非常非常大,因为整车的重量太重了。
我们先来看看最原始的发动机和变速箱的交互。
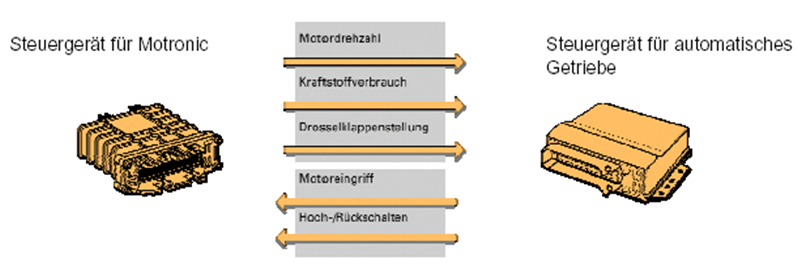
还是以我们的发动机控制单元和变速箱控制单元为例子,这个如果两个控制单元要通讯,发动机把转速、转矩、油门、三个信号给到变速箱,变速箱把提速请求、档位反馈给发动机;
每条信息都需要各自的线路,因此随着信息量的不断加大,所需的线路以及控制单元上的插头数目也随之增加。因此这种数据传输模式仅适用于信息量数目有限的情况下。
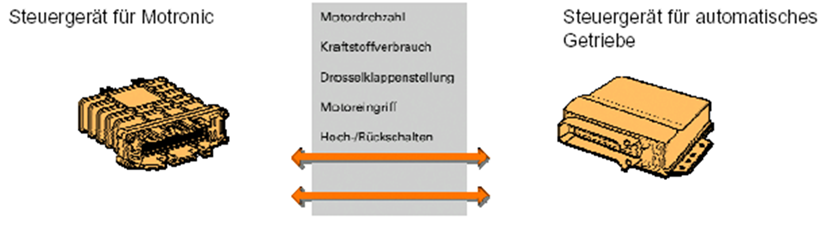
与第一种方法不同,CAN数据总线中,所有信息沿两条线路传输。这两条双向传递的线路中所传递的数据是相同的。在这种传输方式中,线路数与控制单元以及所传递的信息量的数量是无关的。因此当控制单元间需要交换大量信息时,CAN-Bus的优越性就体现出来了。
吃瓜群众:这两个ECU之间也就5根线不多啊,不就比CAN BUS多了3根线么?
机哥:不着急,我给你看看4个ECU之间的通讯是怎么样的。
进入20世纪80年代,汽车逐渐电子化、智能化,新兴的电子技术取代汽车原来单纯的机电液操纵控制系统以适应对汽车安全,排放、节能日益严格的要求。例如,最初由电子控制的燃油喷射、点火、排放、防抱死制动区动力防滑、灯光、故障诊断及报警系统等。
到20世纪90年代以后,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 929
929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









