







前言与目录
这篇详细阐述了彗差的定义、表示方法、对成像质量的影响、校正(或消除)方法,重点在于彗差的校正,并简要介绍了彗差与正弦差之间的关系。
目录
正文
一、彗差定义
由位于主轴外的某一轴外物点,向光学系统发出的单色圆锥形光束,经该光学系统折射后,若在理想平面处不能结成清晰点,而是结成拖着明亮尾巴的彗星形光斑,则此光学系统的成像误差称为彗差。
彗差(coma aberration)表示的是轴外物点宽光束经系统成像后失对称的情况,具体而言就是轴外物点(或称轴外视场点)所发出的锥形光束通过光学系统成像后,在理想像面不能成完美的像点,而是形成拖着尾巴的如彗星形状的光斑,故称为彗差。
轴外点的像存在非旋转对称性。如图1所示,平行光来自于无穷远处的轴外点,它们以一定的角度入射到镜头,并被镜头聚焦于轴外一定高度处,该高度由镜头的视场角和焦距决定。如果镜头自身限制来自视场中不同点的光束,则孔径光阑位于镜头上。通过孔径光阑中心的光线称为主光线。物面上的每一点只有一条主光线。
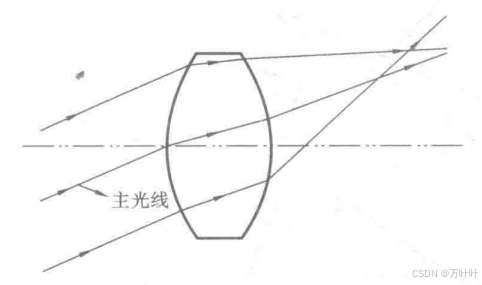
定义由轴外物点和光轴所确定的平面为子午面,它是系统的对称面,也是光束的对称面子午面内的光束称为子午光束,经系统成像后仍位于该平面内。因此,可以用平面图形表示出子午光束的结构。包含主光线并垂直于子午面的平面称为弧矢面,弧矢面内的光束称为弧矢光束。子午面和弧矢面有一条公共光线,即主光线。
由图1可以看出,轴外物点发出的光束中,对称于主光线的一对光线经光学系统后,失去对主光线的对称性,使交点不再位于主光线上。彗差通常用子午面上和弧矢面上对称于主光线的各对光线,经系统后的交点相对于主光线的偏离来度量,分别称为子午彗差和弧矢彗差
。
1、子午彗差
如图2所示,由于子午面内的上下光线对 a、b 的交点并不在理想像面上,为了计算方便,把上下光线对的交点高度用它们各自与像面的交点的高度和
的平均值来代替,相应主光线的高度用主光线在像面上的高度
来表示,即子午彗差的计算公式为
(公式1)
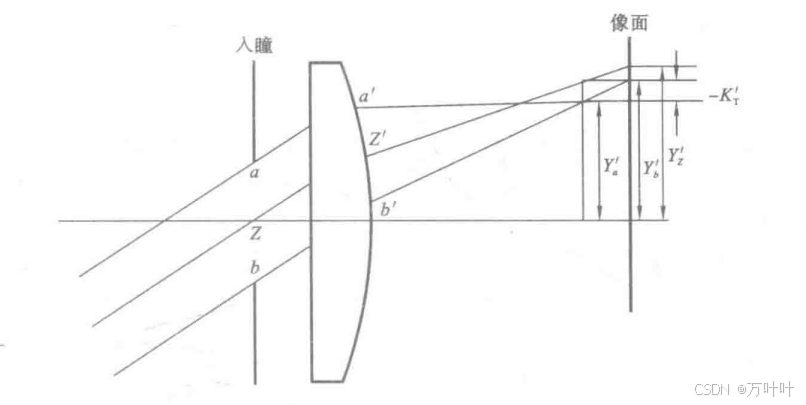
若 ,彗星状像斑的尖端朝向视场中心,称为正彗差;若
,则尖端远离视场中心,图2所示的即为这种情况,称为负彗差。
2、弧矢彗差
再看弧矢面的情况,图 3 所示的是物点B以弧矢光线成像的立体图,弧矢面内有一对前后光线d,它们对称于主光线,因此也对称于子午面,故成像后的交点也必然在子午面内。这对光线在入射前虽然对称于主光线,但是它们的折射情况与主光线的不同。主光线在子午面内折射,而光线cd在由人射光线和人射点法线所决定的平面内折射,因此它们虽相交在子午面内,但并没有交在主光线上,这样也使得这对光线出射后不再关于主光线对称。
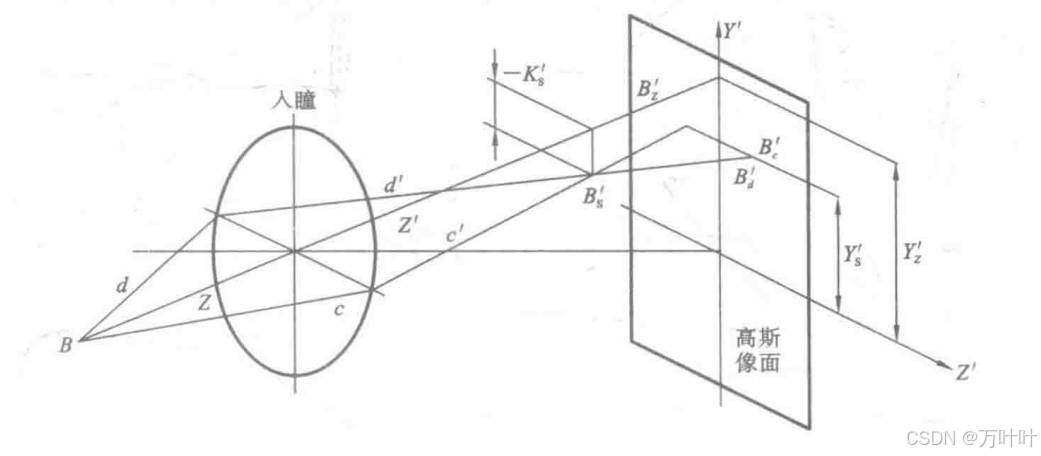
由图可知,光线c' 和d' 在高斯像面上交点的高度相同,为。所以,弧矢彗差的大小为
(公式2)
弧矢彗差与子午彗差之间的大小关系为
(公式3)
弧矢光线在子午面以外,属于空间光线,计算较为复杂,考虑到弧矢彗差总比子午彗差小,故手工计算光路时一般不予考虑;
二、彗差的表示方法
根据彗差的定义,彗差是与孔径U(h)和视场y(ω)都有关的像差。具体而言,彗差与视场呈线性关系,与孔径的平方成比例。当视场和孔径均为零时,没有彗差,故展开式中没有常数项。因此彗差的级数展开式为
(公式4)
式中:第一项为初级彗差,第二项为孔径二级彗差,第三项为视场二级彗差。对于大孔径、小视场的光学系统,彗差主要由第一项和第二项决定;对于大视场、小孔径的光学系统,彗差主要由第一项和第三项决定。
同样,当边缘彗差校正为零时,在0.707带光处有最大的剩余彗差,为全孔径二级彗差的一1/4:
(公式5)
与此相应,初级子午彗差的分布式为:
(公式6)
初级弧矢彗差的分布式为:
(公式7)
式中: 为初级彗差系数(也称第二赛德尔和数),
为每个面上的初级彗差分布系数,有
![]()
三、彗差的校正
此可以与我另一篇写的zemax操作数的矫正彗差的对应
链接:彗差控制操作数【ZEMAX操作数】_操作数慧差-CSDN博客
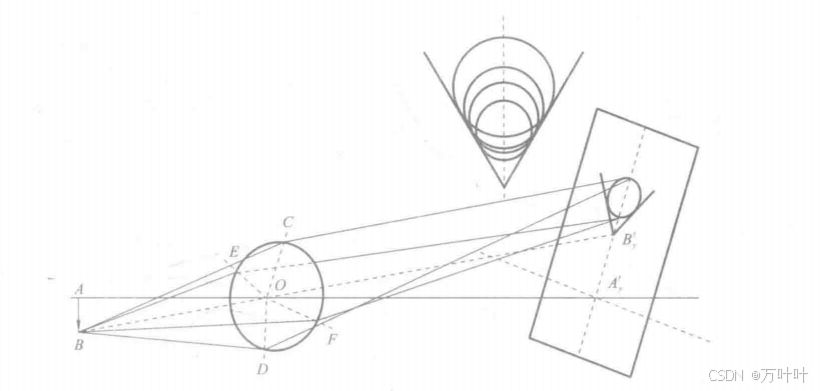
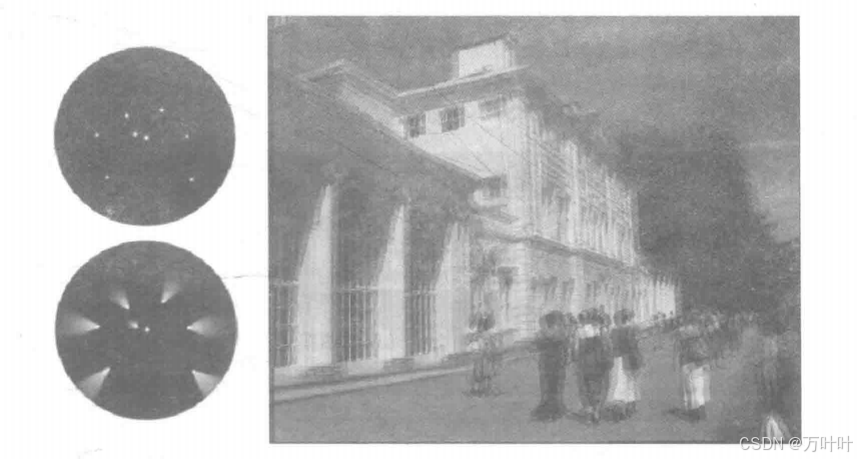
已知彗差是轴外物点以宽光束成像的一种失对称的垂轴像差,除了子午面和弧矢面两个截面外,其他截面也都有不同形式的失对称。如果人瞳为一圆环,轴外点进入系统的光线就是以物点为顶点、以主光线为对称中心的圆锥面光束,不同的孔径对应于不同大小的光锥。此光束经系统后,由于存在彗差,因此不再对称于主光线的圆锥面光束,也不再会聚于一点。不同孔径的光线在像平面上会形成半径不同的相互错开的圆斑。距离主光线像点越远,形成的圆斑直径越大,这些圆斑相互叠加的结果就是形成了一个形状复杂、对称于子午面的弥散斑(彗星状),如图4所示。该光斑的头部(尖端)较亮,至尾部亮度逐渐减弱,损害了轴外物点成像的清晰度,使成像质量降低,如图5所示。
由式4可知,彗差值随视场的增大而增大,故对于大视场的光学系统,其彗差必须予以校正。由初级彗差分布系数可知,当在求得各面的分布值S1以后,只要乘以该面的因子 ,即可求得
。由于分布式中含有与光阑位置有关的
项,因此光阑的位置可以使彗差发生变化。
这样可以把光阑位置作为校正彗差的一个参数。利用光位置来校正或减小与光阑位置有关的像差是光学设计中经常采用的方法。由初级彗差分布系数知,在以下四种情况下,均不产生慧差:
-
=0,即光阑在球面的曲率中心时;
-
=0,即物点在球面顶点时;
-
,即物点在球面的曲率中心时;
-
,即物点在
处时;
若一个正弯月透镜正向放置,则产生正值彗差;若反向放置,则产生负值彗差。两弯月透镜凹面相对,中间放置光阑,物像倍率为-1,即两透镜对称,产生具有相反符号的彗差值,可以消除彗差。由于一般光学系统的放大率不等于-1,因此,绝对的对称结构并不适合,根据实际系统的物像关系,设计接近对称结构的光学系统,将有利于自动校正彗差。
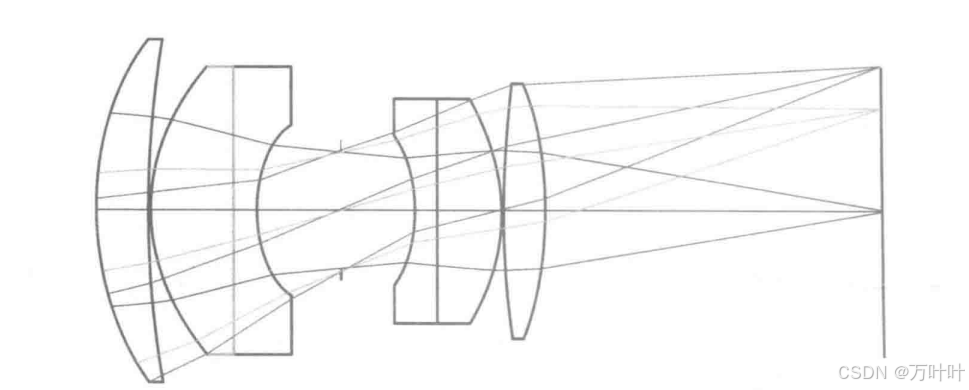
值得注意的是,包括彗差在内的所有轴外点垂轴像差,对于对称式光学系统成像时,是等于零的。这是对称面上的垂轴像差是大小相同、符号相反,可以完全抵消的缘故。这一设计思想已在光学设计中得到应用,如经典的柯克三片物镜、双高斯照相物镜等,都是将视场光阑置于镜头组中间使光阑两边对称,如图6所示。这种结构不只对彗差有校正作用,对像散、场曲和畸变的校正也非常有帮助。
彗差对于大孔径系统或望远系统影响较大。彗差的大小与光束宽度、物体的大小、光阑位置、光组内部结构(透镜的折射率、曲率、孔径等)有关。改变透镜的形状组合,可较好地消除彗差。如能对该透镜消除球差,则彗差亦得到改善。
对于某些小视场、大孔径的系统(如显微镜),由于物高很小,彗差也很小,如果用高度的绝对差值来表示失对称的情况就不是非常合理,不足以描述系统彗差的特性,因此对于小视场大孔径系统,一般用相对值来加以表示。
四、彗差对光学设计的像质量影响
-
图像清晰度降低:彗差会导致轴外点发出的光束在通过光学系统后,不会聚于一点,而是形成一个拖着尾巴的彗星状光斑,这种失对称的像差直接影响了图像的清晰度。
-
图像对称性破坏:由于彗差引起的图像不对称,使得图像在离轴区域变得模糊,影响图像的对称性。
-
细节模糊:特别是在拍摄时,彗差会使边缘区域的细节变得模糊,影响整体成像效果。
-
对大孔径系统和望远系统影响较大:彗差的大小与光束宽度、物体的大小、光阑位置、光组内部结构(折射率、曲率、孔径)有关,对于大孔径系统和望远系统影响较大。
-
影响特定类型的光学系统:例如,在天文摄影中,彗差是一个特别重要的像差,因为点光源(如恒星)的成像会受到彗差的影响,形成锥形图像。
-
设计挑战:光学设计师需要通过选择合适的透镜曲率、使用围绕中心光阑对称定位的正确镜头组合来校正彗形像差,或者通过适当收小光孔来减少彗差对成像的影响。
五、ZEMAX 中彗差的描述
这一节将单独出一篇文章描述---
--

本篇文章为个人学习笔记,仅供学习和复习使用,不涉及商业目的。未经允许不得转载或用于商业用途。

















 1650
1650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









